




- @m0_62710548
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
USART是通用同步异步收发器的缩写,它可以进行同步和异步两种方式的通信。异步通信通过波特率(Baud Rate)进行数据传输,同步通信则通过时钟信号来协调数据传输。在现代嵌入式设备中,USART被广泛用于与传感器、无线通信模块及其他外围设备的连接。

KNN是一种简单但功能强大的算法,适用于分类和回归任务。然而,其计算成本和对K值的敏感性使其在处理大规模数据集或高维数据时存在一定的局限性。随着数据规模的增加,优化KNN的计算速度和性能成为一个值得探索的方向。你是否有使用KNN算法进行项目的经验?在实践中你会选择什么样的距离度量方法?欢迎分享你的看法和经验!
规则组(Regular Group)是STM32 ADC最常用的转换组,主要用于常规的多通道采样。规则组可以配置多个ADC通道,并按照配置的顺序依次进行采样。它适合那些需要周期性采样的应用,如传感器数据采集、环境监控等。规则组的触发方式灵活,支持软件启动和硬件事件触发。它在不要求实时高优先级的应用场景中表现出色,通常通过定时器或外部事件进行触发,从而实现自动化的采样和处理。

PWI模式是专为捕获PWM信号设计的输入捕获模式。在该模式下,定时器的两个输入捕获通道(通常为CH1和CH2)协同工作,通过捕获PWM信号的两个不同特征(通常是上升沿和下降沿)来实现对信号频率和占空比的测量。CH1通常用于捕获PWM信号的上升沿,以此来测量信号的周期。CH2则用于捕获PWM信号的下降沿,用于计算占空比。

在嵌入式系统的开发过程中,常常需要对外部信号进行精确的时间测量,如测量脉冲信号的周期、频率以及占空比等。STM32系列微控制器提供了丰富的定时器资源,其中的输入捕获(Input Capture, IC)模式能实现对信号的上升沿或下降沿的捕获,为测量这些信号提供了强大的工具。本文将详细讲解STM32输入捕获模式的基本原理,特别是测频法和测周法,并结合STM32定时器内部电路的运行流程,解释数据是如何

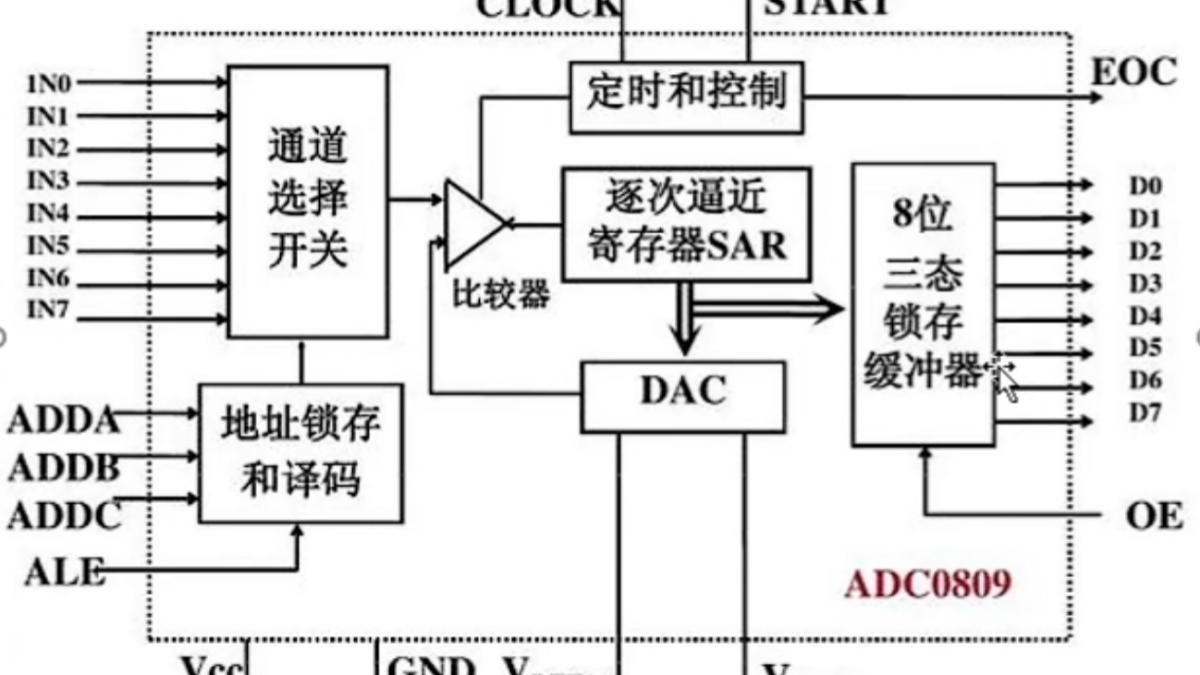
逐次逼近型ADC(SAR ADC,Successive Approximation Register Analog-to-Digital Converter)是一种广泛应用于模拟信号数字化的模数转换器。它以其高速度、低功耗以及适中的分辨率而著称,特别适合于各种嵌入式系统、传感器接口以及物联网设备等应用场景。本文将介绍SAR ADC的工作原理、特点以及其在实际中的应用。
爬山算法(Hill Climbing Algorithm)是一种启发式搜索算法,主要用于解决优化问题。其目标是在一个解空间中找到局部最优解,或者在某些改进下尽可能接近全局最优解。与其他搜索算法(如广度优先搜索和深度优先搜索)不同,爬山算法不需要完整地遍历整个解空间,而是通过不断“爬升”到更优解来逐步接近目标。虽然爬山算法非常简单并且在某些情况下非常有效,但它也有局限性,比如可能会陷入局部最优解,或
