




- @m0_51559565
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文分析了C# WPF中窗体原子表溢出导致软件闪退的根本原因。通过源码追踪发现,当后台线程首次调用Geometry.Parse()时,会触发Dispatcher自动创建,进而生成带GUID的唯一窗口类并注册到AtomTable中。由于Geometry解析完成后虽会冻结对象但无法撤销已创建的Dispatcher和窗口资源,当大量后台线程首次解析Geometry时,就会持续累积AtomTable节点。
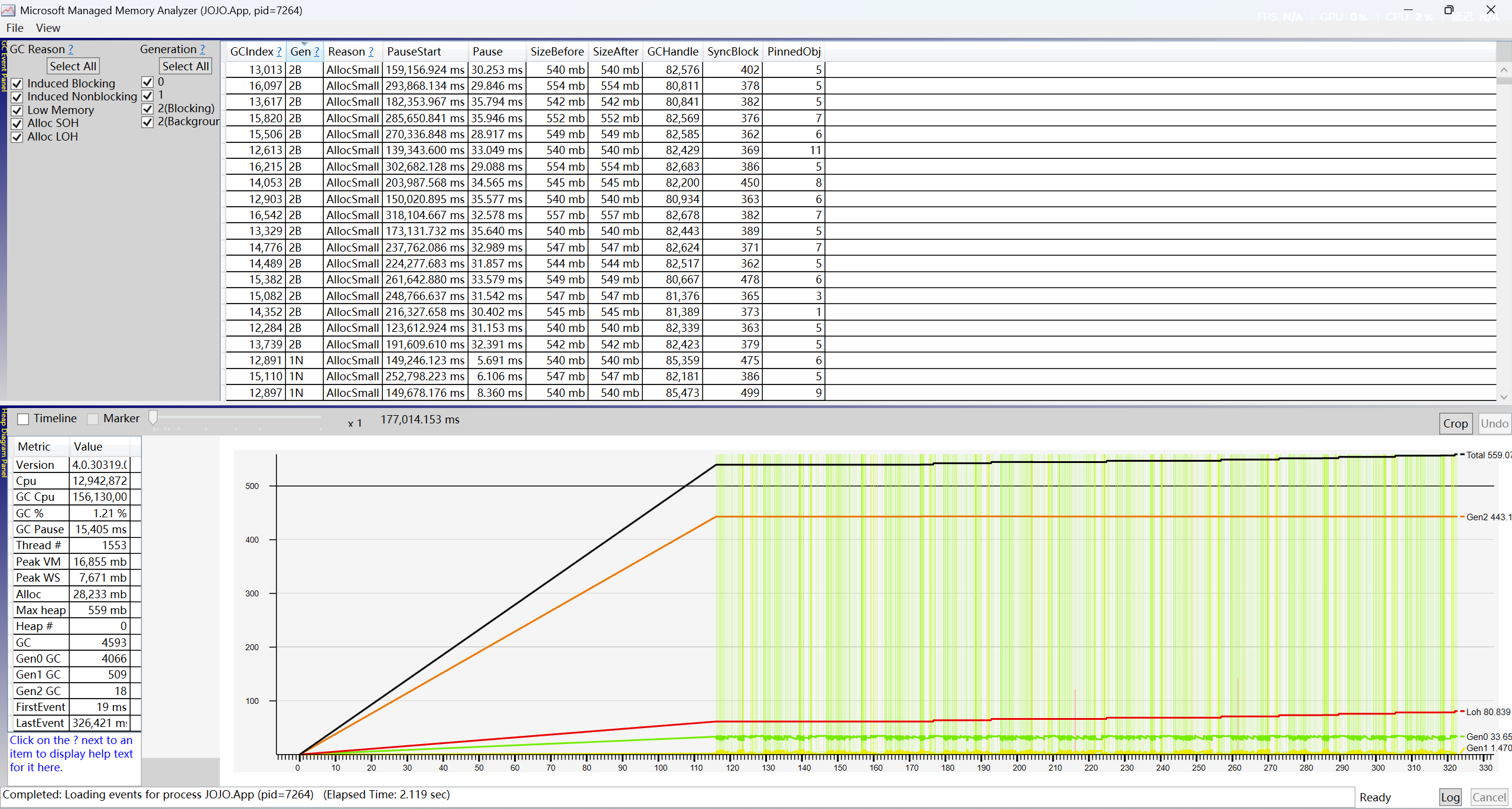
本文探讨了基于OpenCvSharp的视觉系统中Mat对象池化的工程实践。通过开源项目实例分析,文章指出池化的核心价值在于重构内存分配模型,而非简单的对象复用。系统采用大图与小图分治策略:大图采用"规格分桶+物理块+槽位"管理,小图采用"sizeclass+page+slab"模式。这种设计显著提升了系统稳定性,减少了GC次数(池化后GC总次数7108次vs
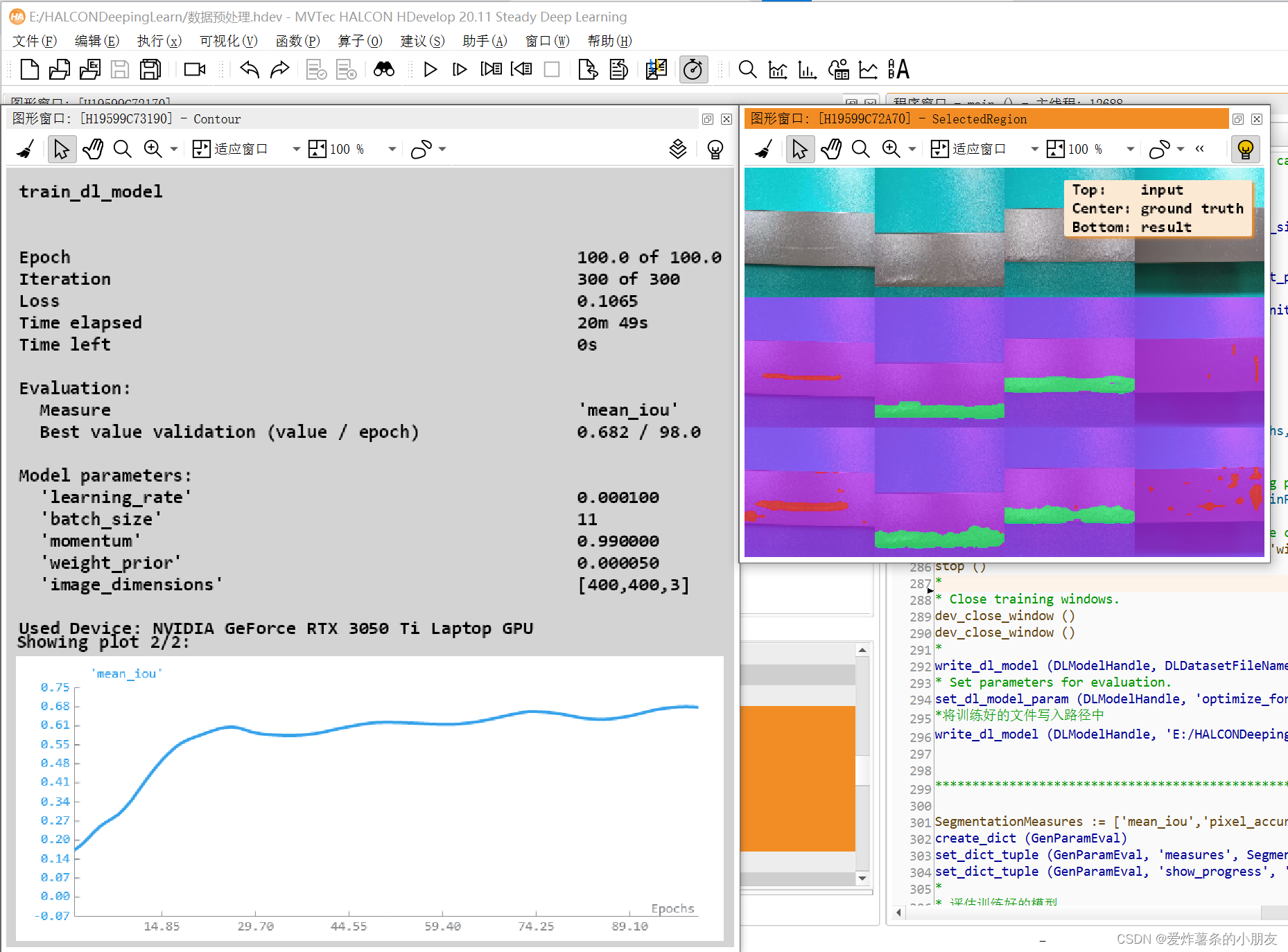
halcon在深度学习中提供了7种学习方式和例子。其中最为常见的为语义分割,一般使用与在需要标注显示的缺陷检测项目中。几乎所有的2D缺陷检测都可以使用语义分割作为项目部署。先上完整程序。
本文通过MatPoolsTest项目实践,揭示了高性能图像处理中池化设计的反常识现象:理论上更先进的分页分级锁、句柄直返等优化方案,在实际业务中反而低于原始全局锁的性能表现。研究发现,在高频、短链路、小粒度操作场景下,决定吞吐量的关键不是锁模型本身,而是热路径的总固定成本。全局锁的优势在于将热路径压缩为最短、最统一、最少分支的执行链,避免了多层同步和额外语义带来的固定成本。文章强调性能优化的本质是
本文探讨了基于OpenCvSharp的视觉系统中Mat对象池化的工程实践。通过开源项目实例分析,文章指出池化的核心价值在于重构内存分配模型,而非简单的对象复用。系统采用大图与小图分治策略:大图采用"规格分桶+物理块+槽位"管理,小图采用"sizeclass+page+slab"模式。这种设计显著提升了系统稳定性,减少了GC次数(池化后GC总次数7108次vs
halcon在深度学习中提供了7种学习方式和例子。其中最为常见的为语义分割,一般使用与在需要标注显示的缺陷检测项目中。几乎所有的2D缺陷检测都可以使用语义分割作为项目部署。先上完整程序。
本文作者是一名 C# 开发者,因日常开发中常需对象映射,为深入理解底层原理、巩固核心知识点,从零实现了轻量级对象映射库 MyMapper 并开源。文章分享了开发思路、核心架构与实现,重点解析反射、自定义特性、表达式树在项目中的落地,还谈及技术、设计及开源层面的学习收获,鼓励开发者通过 “造轮子” 深入学习。

摘要:本文介绍了.NET原生依赖注入和Prism框架的依赖注入实现方式。.NET原生DI通过IServiceCollection注册服务、IServiceProvider解析服务,支持Singleton、Scoped和Transient三种生命周期。重点分析了构造函数注入机制,通过容器获取实例时自动完成依赖注入。对比了单例注入与单例设计模式的差异,指出依赖注入更便于测试和项目管理。Prism框架在
摘要:本文介绍了.NET原生依赖注入和Prism框架的依赖注入实现方式。.NET原生DI通过IServiceCollection注册服务、IServiceProvider解析服务,支持Singleton、Scoped和Transient三种生命周期。重点分析了构造函数注入机制,通过容器获取实例时自动完成依赖注入。对比了单例注入与单例设计模式的差异,指出依赖注入更便于测试和项目管理。Prism框架在
本文章只针对较为常见的案例,具有一定的通用性。具体内容为本人的实际学习笔记,做为记录和参考。相机,镜头选型和打光需求分析,(识别定位,缺陷检测,OCR,测量)方案设计,相机光源。方案合同概要,程序具体书写调试测试修改结题维护书籍《工程光学》打光原则:出现大的对比度,大的暗亮变化焦距,CCD到镜头玻璃的距离CCD的尺寸固定不变,焦距变大则视野变小成像放大倍数=像元大小【um】/(系统分辨率【mm】1