




- @m0_46808930
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在VSCode中进行Python开发时,选择合适的Python解释器和虚拟环境至关重要。如果VSCode中所使用的Python解释器没有安装所需的库,就会导致库找不到的错误。通常情况下,我们会在Windows终端中使用pip安装所需的库,但如果VSCode未使用相同的Python环境,就会出现上述问题。

这份教程重点按openclaw安装配置的场景写了:腾讯云 Ubuntu CVM、非 root 部署、systemd --user 常驻、火山方舟接入,以及后续的渠道 / 插件 / skills / MCP 扩展。OpenClaw 官方当前推荐的 Linux 起步路径仍是安装脚本加 openclaw onboard --install-daemon,Linux 上推荐 Ubuntu LTS,长期运行

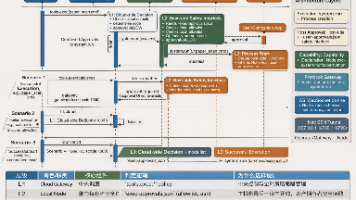
OpenClaw远程执行机制解析:三层权限控制详解 OpenClaw的远程命令执行采用分层控制架构,包含三个关键层级: 云端Gateway策略层:定义默认执行意图,通过tools.exec.*配置决定请求发往何处(node/sandbox/gateway)、采用何种安全模式(deny/allowlist/full)以及是否需要交互审批。这属于控制面的调度策略,不涉及最终执行权限。 本地approv
OpenClaw Skills 安装全流程:目录区别、ClawHub 登录、限流、远程服务器回调失败一次讲透

Cron 就不再只是一个“定时器”,而会成为整套 OpenClaw 自动化体系里的时间驱动中枢。把它和能力扩展、通道投递、持久会话、自定义工作流结合起来,AI 智能体才真正具备“无人值守持续做事”的能力。

Cron 就不再只是一个“定时器”,而会成为整套 OpenClaw 自动化体系里的时间驱动中枢。把它和能力扩展、通道投递、持久会话、自定义工作流结合起来,AI 智能体才真正具备“无人值守持续做事”的能力。
这份教程重点按openclaw安装配置的场景写了:腾讯云 Ubuntu CVM、非 root 部署、systemd --user 常驻、火山方舟接入,以及后续的渠道 / 插件 / skills / MCP 扩展。OpenClaw 官方当前推荐的 Linux 起步路径仍是安装脚本加 openclaw onboard --install-daemon,Linux 上推荐 Ubuntu LTS,长期运行
摘要: 本文详细分析了在Linux服务器上使用root用户部署OpenClaw时常见的两个问题:Skill安装失败和进程反复自启。根本原因在于root权限下的环境变量不一致、外部工具调用限制以及多用户多实例冲突。解决方案包括:创建专用普通用户(claw)、备份并迁移现有配置、清理残留进程、切断自动重启源头。关键步骤是修正目录归属权限(chown)并以普通用户重新启动服务,同时提供了完整的排障流程和

Ubuntu VM → 非 root 用户 → 官方安装脚本 → onboarding 里选 loopback + token → 配一个 API key 模型 → 先接 Telegram 或 Feishu → 打通 Dashboard → 跑 openclaw doctor → 再逐步加 plugins 和 ClawHub skills。这条路线同时符合官方文档的默认思路,也避开了社区里最常见的

Ubuntu VM → 非 root 用户 → 官方安装脚本 → onboarding 里选 loopback + token → 配一个 API key 模型 → 先接 Telegram 或 Feishu → 打通 Dashboard → 跑 openclaw doctor → 再逐步加 plugins 和 ClawHub skills。这条路线同时符合官方文档的默认思路,也避开了社区里最常见的