- @lizjiwei
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
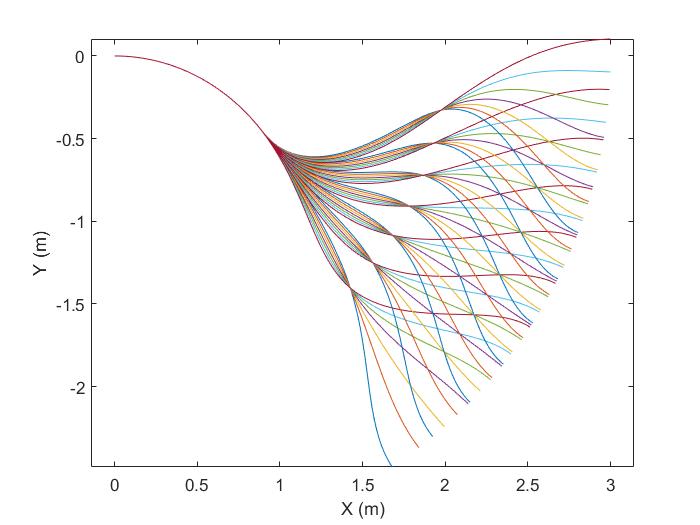
CMU的自主环境探索利用matlab生成前向三次样条路径点在CMU开源的自主环境探索算法中,机器人或者无人机的主要是靠matlab进行前向三次样条曲线生成路径点的方式进行的,这部分程序在matlab中运行并且生成相应的文件,从而为local_planner提供帮助。1.采样路径的生成利用车辆的运动学特性,进行时间维度上的离散,从而通过预测得到未来一段时间机器人的状态,从而实现了采样路径的生成。下面
Eigen学习教程(二)2.6 约简、访问与广播2.6.1 约简在Eigen中,约简是一个采用矩阵或数组并返回单个标量值的函数。最常用的归约方法之一是.sum(),它返回给定矩阵或数组内所有系数的总和。示例代码如下:Eigen::Matrix2d mat;mat << 1, 2,3, 4;cout << "Here is mat.sum():" << mat.s
Eigen学习教程(三)3. 稠密线性问题与分解本节说明了如何求解线性系统,计算各种分解,例如LU,QR,SVD,本征分解…阅读此节后,请不要错过我们的密集矩阵分解目录。基本线性求解 Ax=b。该解决方案:可将各种分解之间进行选择,取决于你的矩阵一个样子,取决于你是否赞成速度或准确性。但是,让我们从一个适用于所有情况的示例开始,这是一个很好的折衷方案。3.1 基本线性求解Matrix3f A;Ve
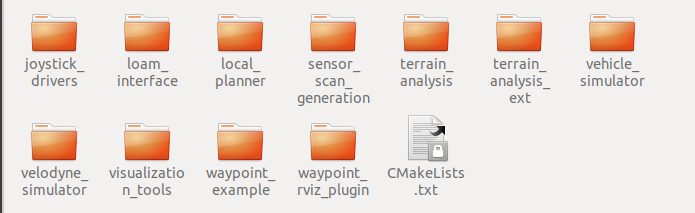
Tare_Planner的学习笔记(一)CMU机器人研究所于2021年7月开源全套移动机器人自主导航和探索框架,其主要算法都出自近两年CMU发出的顶会论文.该框架主要分为自主探索环境和探索planner两部分:其主要效果在链接中主要表现出来,笔者看到后很是震撼,所以接下来将针对tare_planner算法进行一系列的学习,并且会将学习心得记录在博客上,欢迎有共同爱好的朋友一起学习探讨。一、自主探索
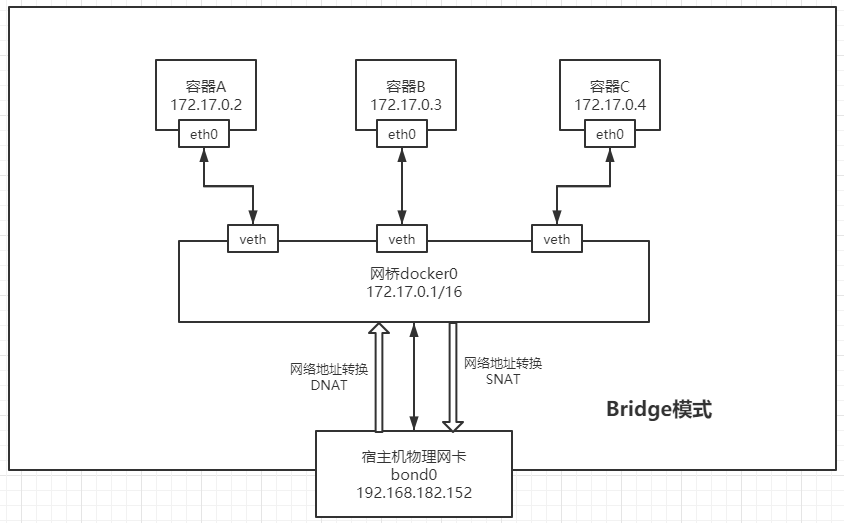
特性容器虚拟机启动秒级分钟级硬盘使用一般为MB一般为GB性能接近原生弱于系统支持量单机支持上千个容器一般几十个。