




- @leonardohaig
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
毫米波与视觉融合及车道线检测视频分享微信公众号:幼儿园的学霸个人的学习笔记,关于OpenCV,关于机器学习, …。问题或建议,请公众号留言;ADAS项目基本就要结束了,今天将项目中的部分结果视频进行一下分享,希望展示的结果能够启迪他人,对其有所帮助。展示的视频分为两部分:1)毫米波和视觉融合的结果2)车道线的检测结果。毫米波和视觉融合结果毫米波和视觉融合——像素坐标系下的融合在进行...
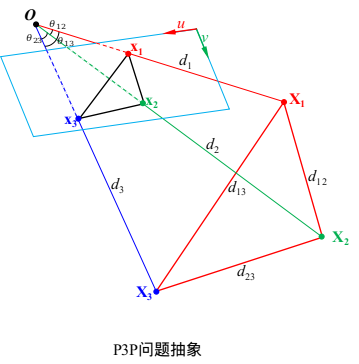
P3P相机姿态估计数学推导,求解及自定义实现微信公众号:幼儿园的学霸目录文章目录P3P相机姿态估计数学推导,求解及自定义实现目录前言相机到空间点距离求解角度θ的计算相机坐标系下的坐标计算自定义实现总结参考资料附录前言PnP问题(Perspective N Points)是指已知3D点的空间坐标及其在相机上的投影,求相机姿态的问题.投影方程可以表示为:λ[uv1]=K[Rt][XYZ1]\lambd
毫米波雷达与视觉融合———联合标定及外参标定问题微信公众号:幼儿园的学霸个人的学习笔记,关于OpenCV,关于机器学习, …。问题或建议,请公众号留言;最近在做ADAS项目,早期时选择的方案是利用纯视觉实现,后面发现纯视觉在测距上有一定的困难,同时纯视觉方案在arm开发板上的检测速率不高,因此考虑采用用毫米波和视觉融合来实现ADAS功能。利用毫米波进行障碍物位置确定,然后利用视觉进行目标...
今日用到了这几个函数/类,小记一下函数的各个参数以及用法。KeyPoint特征点类保存特征点各种信息的KeyPoint类在使用中是不透明的,我们来看看KeyPoint类的主要属性:主要包含的特征点信息有:位置、邻域直径、特征的方向、响应强度、多尺度信息和分类等。特征点匹配的实现就是通过逐个匹配特征点的这些信息。drawKeypoints特征点绘制opencv提供了一个快速绘...
x264及H264实现对OpenCV Mat的编解码微信公众号:幼儿园的学霸个人的学习笔记,关于OpenCV,关于机器学习, …。问题或建议,请公众号留言;之前写的ADAS客户端软件和ADAS程序之间的视频传输采用了cv::imencode和cv::imdecode函数实现编解码,最近偶然间发现可以利用H.264对视频进行编解码,并且效果还不错,特此记录。目录文章目录x264及H26...
点绕坐标系旋转旋转矩阵推导、理解开会过程中,翻笔记本时突然发现了之前推导的点绕坐标系旋转的旋转矩阵求解过程。在直觉上,一个点绕3个坐标轴旋转的旋转矩阵在形式上看起来是一致的,观感上比较优雅、整齐,但是一直没有仔细观察背后的原理。因此又对这个过程进行了一次推导,对这种整齐有了更深的理解,同时对记忆也有所帮助。特此记录。由于我们提到三维坐标系时,常用XYZ三个字母代替3个轴,为了不失一般性,避免字母先
利用小型数据集m2nist进行语义分割——(一)数据集介绍微信公众号:幼儿园的学霸目录文章目录利用小型数据集m2nist进行语义分割——(一)数据集介绍目录缘由前言数据集介绍数据下载/读取/显示参考链接缘由代码地址:https://github.com/leonardohaig/m2nist-segmentation最近晚上有点失眠,玩手机伤眼睛,那就学习吧。考虑到没有写过分割网络...
微信公众号:幼儿园的学霸最近在点云处理中,需要获取目标点云的最小包围盒(OBB),在网上看到很多利用PCA求解包围盒的代码,但是代码大多都比较简洁,属于PCA的一个应用,而没有原理的具体描述.因此,抽时间对PCA进行了一些梳理,以方便自己理解.特此记录.目录文章目录目录介绍向量的表示与基变换内积与投影基/基向量基变换的矩阵表示协方差矩阵及优化目标方差协方差协方差矩阵协方差矩阵对角化PCA算法步骤算
自动白平衡–灰度世界算法(Gray World Algorithm)微信公众号:幼儿园的学霸目录文章目录自动白平衡--灰度世界算法(Gray World Algorithm)目录引言灰度世界算法原理opencv实现参考资料引言人的视觉系统具有颜色恒常性(Color Constancy),能从变化的光照环境和成像条件下获取物体表面颜色的不变特性,但成像设备不具有这样的调节功能,如彩色相机内部有三个C
1.空间中平面方程的一般形式为: Ax+By+Cz+D=0 (参数,A,B,C,D是描述平面空间特征的常数) 已知空间中3个点的坐标(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),求解平面方程。解法1.根据已知的3个点,建立3个联合方程组,进行消元;2.根据克莱姆法则,求解的结果中,(A,B,C)表示平面的法向量。下面给出OpenCV中具体代码实现: ...