- @leng_peach
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
换一个指令执行:rosdep install --from-paths src --ignore-src -r -y。在planning中选择manipulator,然后点击Plan和Execute可以拖动轨迹球让机械臂动起来。ros版本:ros-noetic-desktop-full,安装此版本ros无需再安装moveit运动规划库。在使用rosdep install --from-paths
在ur_description/urdf/ur5_robot.urdf文件中包含robotiq_85_gripper,并且实例化该宏。下载后编译会报错,原因是在view_ur5.launch文件中机器人状态发布节点中type属性出错了,改正后就可以编译成功了。prefix:其实就是一个名称前缀,在实例化宏的时候可以加也可以不加,加了后面可能还要修改一些名称,所以这里就不加了。版本的包,这个应该不影
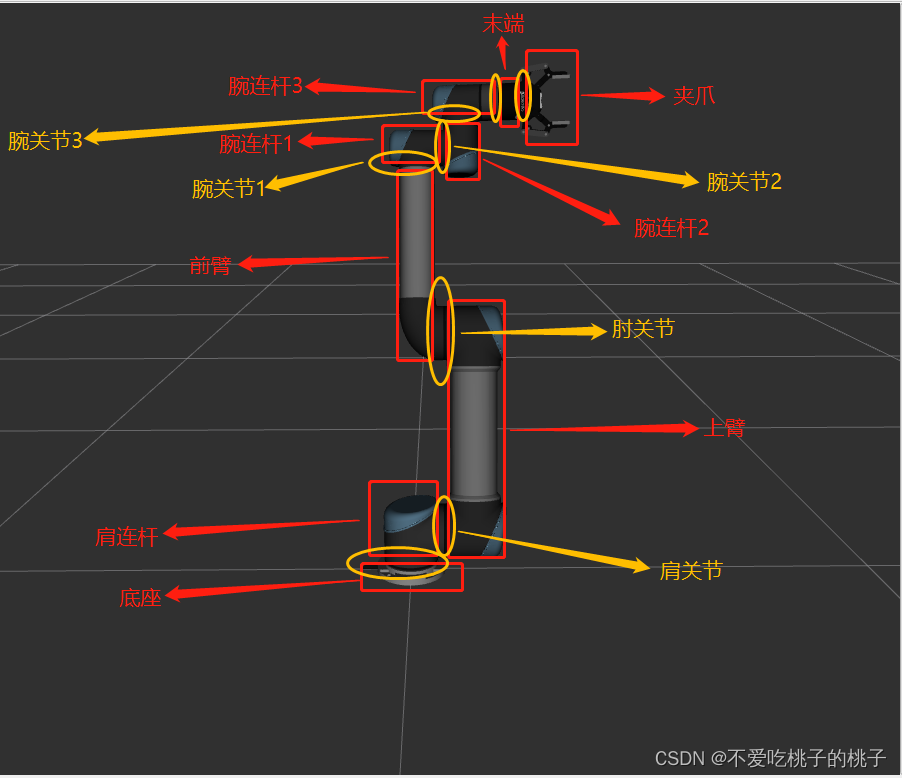
自己定义的命名空间是“gripper”,而通过Moveit生成的控制器名字是“gripper_controller”,所以导致在Gazebo中夹爪控制失败。这里我添加了两个规划组,一个是arm,一个是gripper,后面使用moveit提供的python接口会用到,arm控制机械臂运动,gripper控制夹爪运动。接上次在机械臂的urdf文件(机械臂外型描述文件)中加入夹爪后,还需要通过Movei
本文使用的环境:Linux版本:Ubantu20.04ros版本:ros-noetic-desktop-full,安装此版本ros无需再安装moveit运动规划库编译软件:vscode。