- @kingdom_java
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
基础通信:MQTT over TCP(tcp://,端口 1883)无人机控制:MQTT over WebSocket(ws://,端口 8083)BASIC 使用 TCPDRC 使用 WebSocket(便于浏览器/Web 客户端连接)都使用 Eclipse Paho MQTT 客户端库,支持 TCP 和 WebSocket 两种传输方式。
一、项目基础定位全称:Agent Harness Performance Optimization System(智能体调度性能优化框架)技术栈:纯 JavaScript 构建,兼容 Node.js / 浏览器双端适配客户端:Claude Code、OpenAI Codex、OpenCode、Cursor 全部主流 AI 代码编辑器插件核心目标:解决 AI 编码智能体三大痛点——上下文溢出、工具调
解决:默认使用Cursor.AppImage 会自动挂载临时目录在/tmp目录下,出现没有权限挂载的报错问题。直接从 https://www.cursor.com/en/download下载最新版本。增量更新的方式没有尝试成功;
• 简化部署环境:部署 ONNX 模型通常只需要一个轻量的 ONNX Runtime 库,其依赖远小于完整的 PyTorch 库,这使得它非常适合资源受限的边缘设备或要求高并发的服务器端部署。• 如果您追求极致的推理性能、需要将模型部署到多样化的生产环境(包括服务器、边缘设备或移动端),或者希望避免沉重的框架依赖,那么在发布时转换为 ONNX 是明显更优的选择。• 动态控制流:如果模型的前向传播逻
尽管 vLLM 不参与训练,但可与训练框架配合实现。但其推理优化技术可显著提升训练后模型的部署效率。vLLM 是推理专用引擎,
目标:拷贝 NBSP,粘贴到 查找目标 栏;替换为: 输入 1个空格;
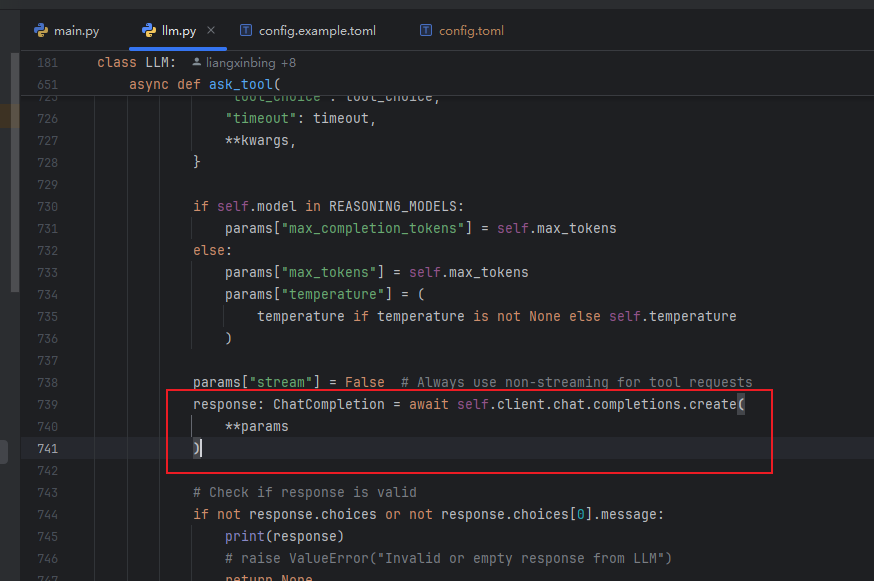
app.llm:ask_tool:7632025-04-29 10:54:26.351 | ERROR| app.llm:ask_tool:763 - OpenAI API error: Error code: 500 - {'error': {'message': 'InvokeModel: operation error Bedrock Runtime: InvokeModel, https
warnings.warn(warn_message, ResourceWarning)通过 with 语句强制资源生命周期管理,确保目录使用完毕后立即清理:"ignore",
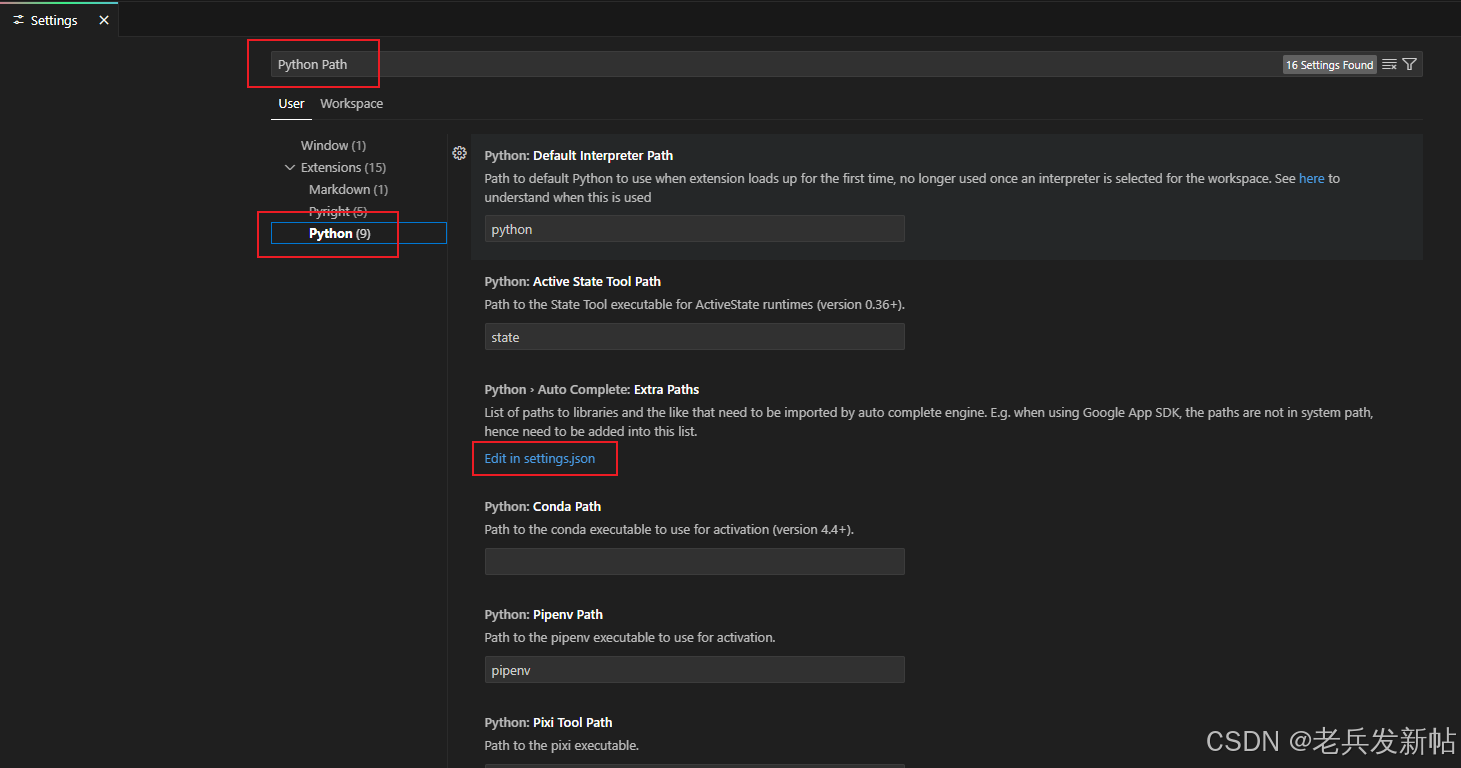
Python Release Python 3.11.9 | Python.org
通过以上方法,你可以精准控制 VS Code 中 Python SDK 的执行环境。• Windows:系统属性 → 高级 → 环境变量 → 新建系统变量。在项目目录创建虚拟环境后,VS Code 通常会自动识别。• 检查路径拼写错误(尤其是 Windows 的转义符)• 在 VS Code 中为不同工作区单独配置路径。• 重载 VS Code 窗口(命令面板输入。• 直接点击列表中已检测到的解释