- @kingboj
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
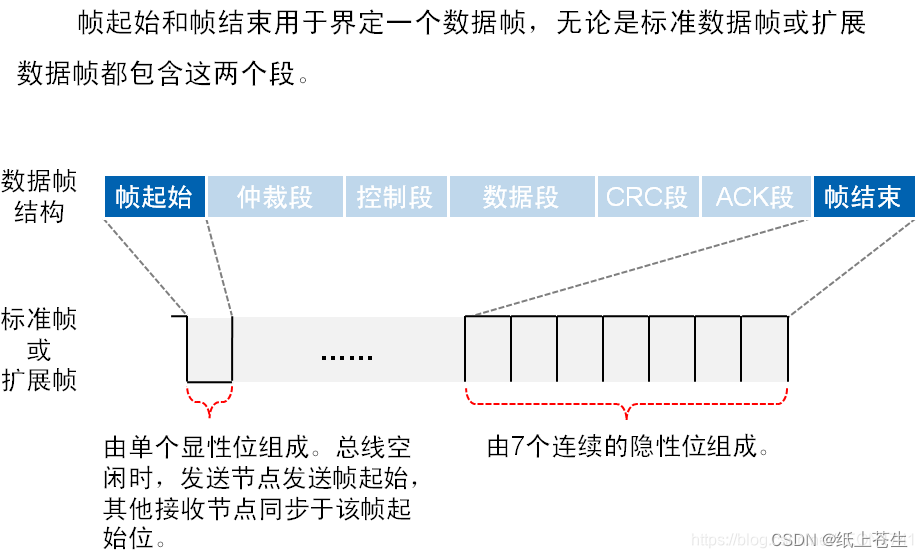
CAN(控制器局域网)是一种广泛应用于汽车和工业自动化领域的通信协议,用于各个电子控制单元(ECU)之间的数据交换。掌握CAN通信需要了解以下几个关键知识点:基本概念:帧结构:CAN通信帧分为标准帧(11位ID)和扩展帧(29位ID),包括报文标识符、控制字段、数据字段、CRC校验等部分。工作模式:常见模式有标准模式和扩展模式,适用于不同的应用场景。协议特性:多主机制:CAN总线支持多主节点,无需
【嵌入式C语言】常见数据转化函数,本文为转载文章,文章链接如下:【嵌入式C语言】常见数据转化函数_嵌入式中通信不同格式数据转化函数-CSDN博客。

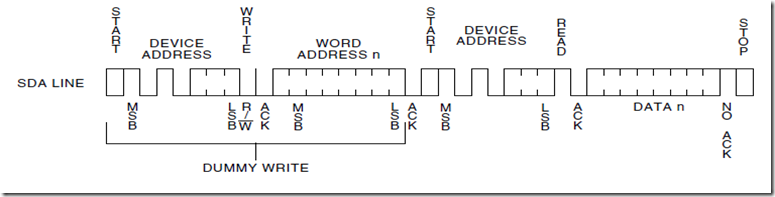
文章结合模拟IIC的波形图片和代码图片对比解析,将IIC通讯拆解为起始信号+停止信号+ACK/NACK信号+发送一个字节+读一个字节来分析学习,最后举实际例子结合实践更加深入理解和使用IIC
1.浮点数存储为四字节数据的方式2.将四字节数据转换为浮点数3.浮点数的基础知识

【本文为转载文章】主要以波形图片结合讲解了IIC数据传输的过程,包括数据的写入和读取,数据传输规则

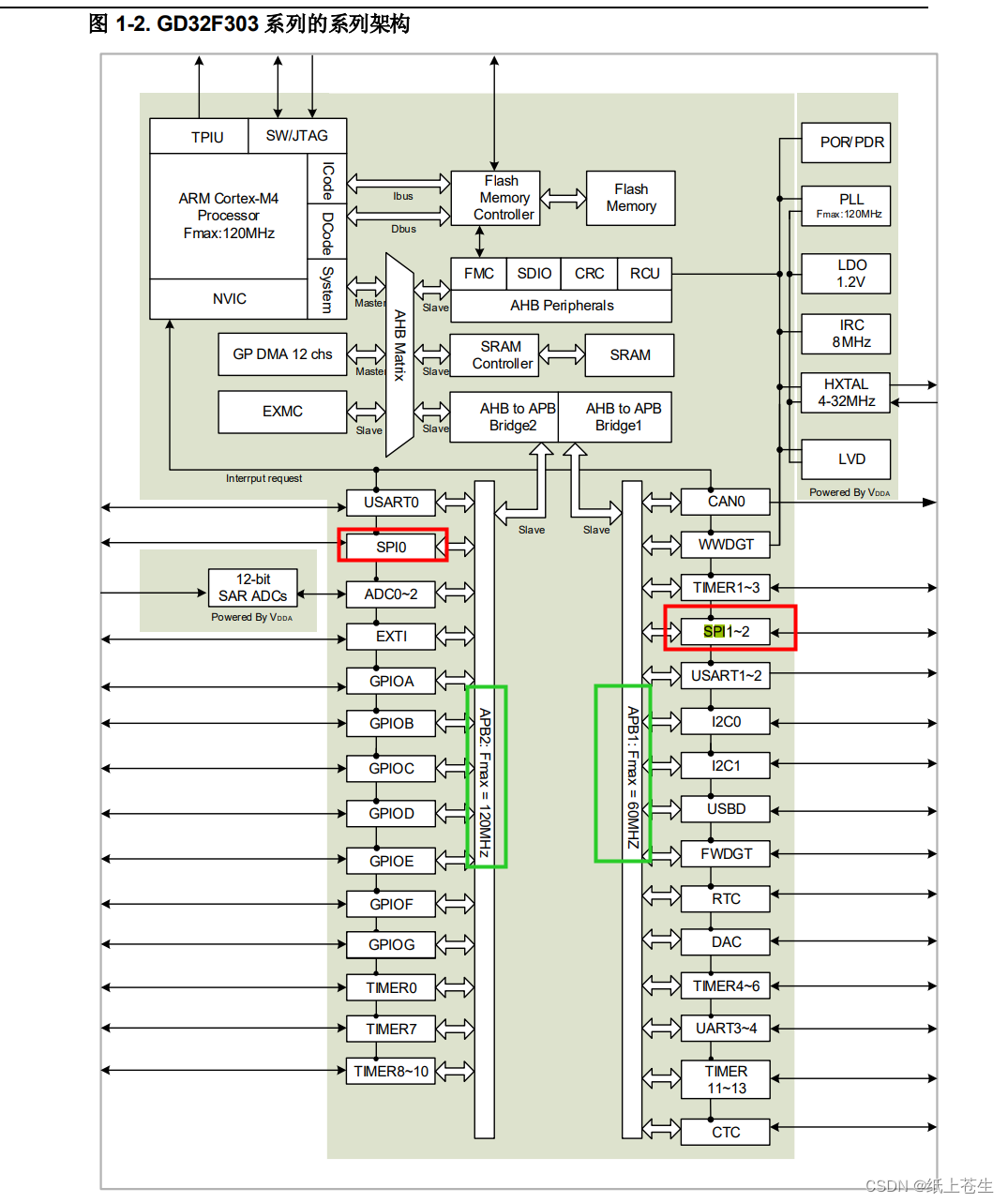
SPI 调试需要细致入微的工作,需要清楚硬件规格和通信协议,确保正确设置参数、连接正常,同时通过逐步调试和信号监测来验证每个步骤的正确性。同时,注重代码的安全性和健壮性,以提高 SPI 通信的可靠性和稳定性
电池均衡(Cell Balancing)分为两种:被动均衡(Passive Balancing)与主动均衡(Active Balancing)。1、 被动均衡 被动均衡,运用电阻器件,将高电压或者高荷电量电芯的能量消耗掉,以达到减小不同电芯之间差距的目的,是一种能量的消耗。 被动均衡的优点是电路结构简单,成本较低;缺点是能量利用率低,同时会增加模组的热量。1.1 被动均衡原理。
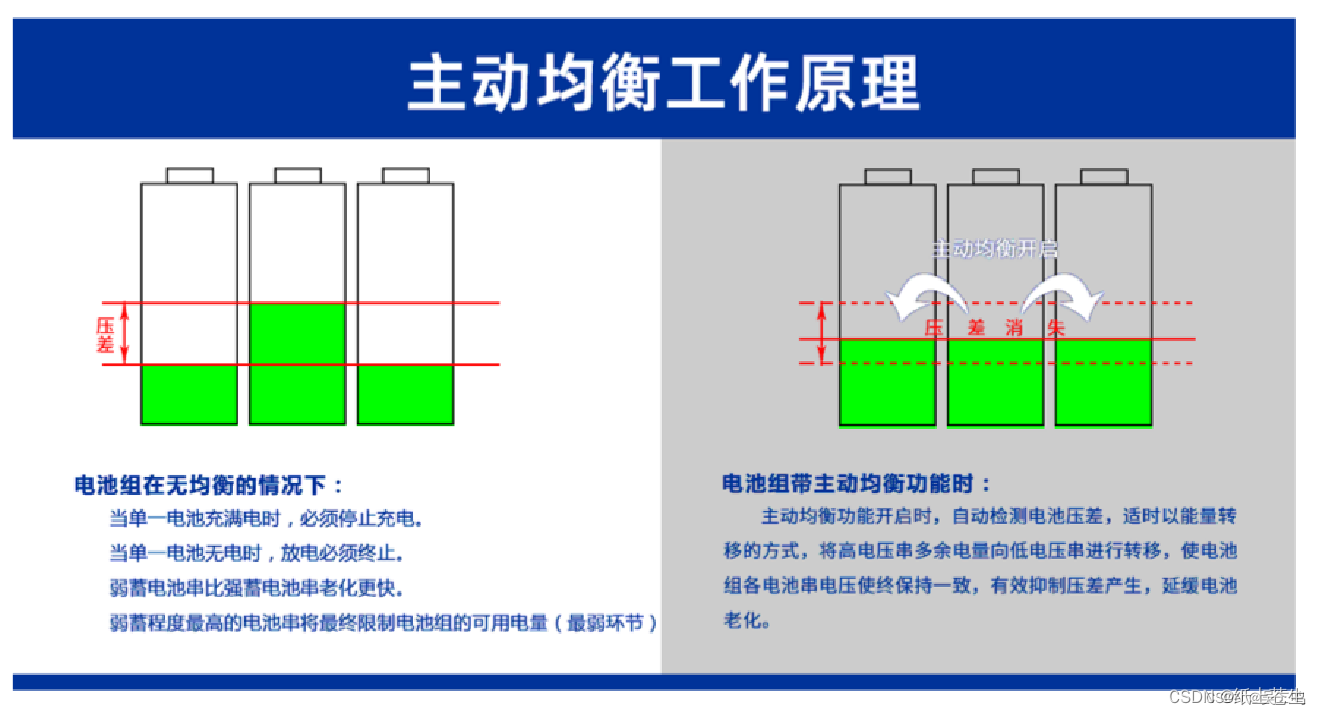
关于储能行业的电芯、模组、PACK、充电特性、常见电池的充放电特性