




- @jiyotin
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
常规机器学习:scikit-learn示例探索性数据分析和数据预处理,线性回归,决策树图像分类ResNet模型示例,合成数据集DenseNet模型示例绘图线性回归和决策树模型使用Python工具seaborn、matplotlib、pandas、scikit-learn进行特征分析,数据处理Tensorflow和Keras实现多测感知器、卷积神经网络CNN和递归神经网络RNN及应用示例AutoKe
背景Streamlit是一个Python库,可帮助我们为没有HTML / CSS / JS的模型开发UI。 大多数模型都停留在Jupyter Notebook且没有吸引力。 然而,使用Streamlit,您可以为模型创建一个干净的界面并将其展示给其他人。 构建界面可使用户以更加用户友好的格式使用您的模型。您无需处理HTML / CSS / JSS支持markdown它具有许多可用的预构建窗口小部件
在这篇文章中,我将向您展示使用 Arduino IDE 将 TensorFlow Lite 模型部署到 ESP32 的最简单方法,无需任何编译内容。Arduino 库这个 Arduino 库是为了简化使用 Arduino IDE 将用于微控制器模型的 Tensorflow Lite 部署到 Arduino 板上。该库包含您所需的所有文件,公开了一个接口来加载模型并运行推理。示例简述:正余弦、正弦等
Python三维点云自动生成 3D 网格和表面重建,创建多个细节层次Python使用4种工具体素化网格,创建点云数据可视化Python计算RGB-D 图像的点云,点云地面检测算法,过滤点云以便下采样和去除异常值,scikit-learn聚类点云数据Python点云和网格计算更多示例:使用泊松盘采样在网格上生成蓝噪声样本,对体素网格上的点云进行下采样,从点云估计法线,计算每个顶点的网格法线
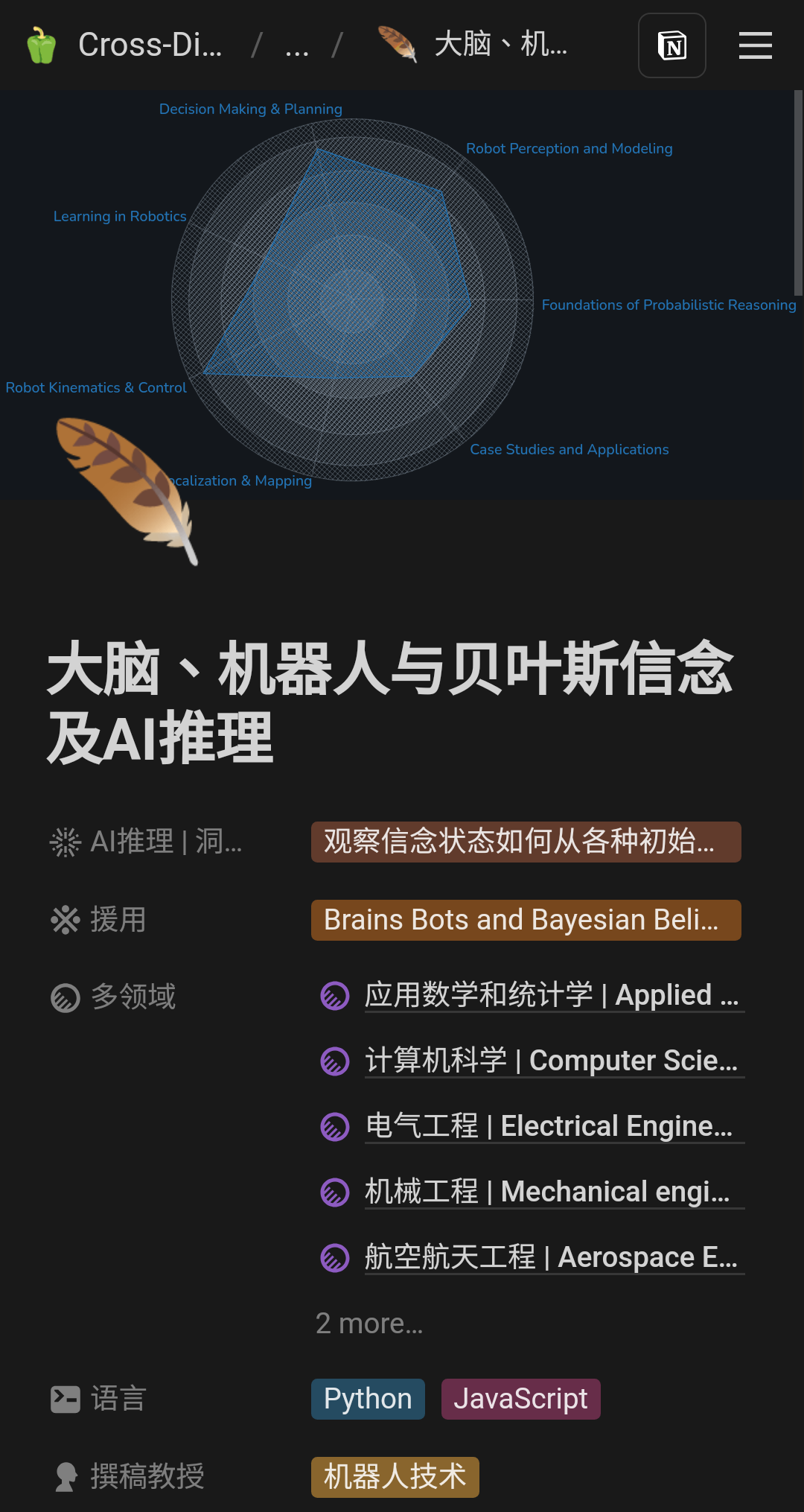
通过结合传感器输入和学习到的世界模型,机器人开始形成内部的“信念”——关于可能存在的现实状态的概率分布。我们将探索机器人智能的演变,揭示概率论、运动建模和深度学习如何结合起来,使机器人能够在复杂、动态的环境中感知、规划和行动。无论是学习绘制你客厅地图的吸尘器,优化城市中飞行路径的无人机,还是预测行人行为的自动驾驶汽车,相同的基本原理都在塑造着它们的“思维”。这篇文章探讨了智能机器人系统是如何构建的
麦克斯韦方程组统一了电、磁、光现象,预测电磁波存在并揭示光的电磁本质,为现代物理和技术奠定基础。该理论不仅支撑无线电、通信等技术应用,还与相对论兼容,启发了后续物理学发展。通过云计算动态可视化电场与磁场的耦合行为,使这一复杂理论更直观易懂。方程组从基础科学到实际应用产生了深远影响。
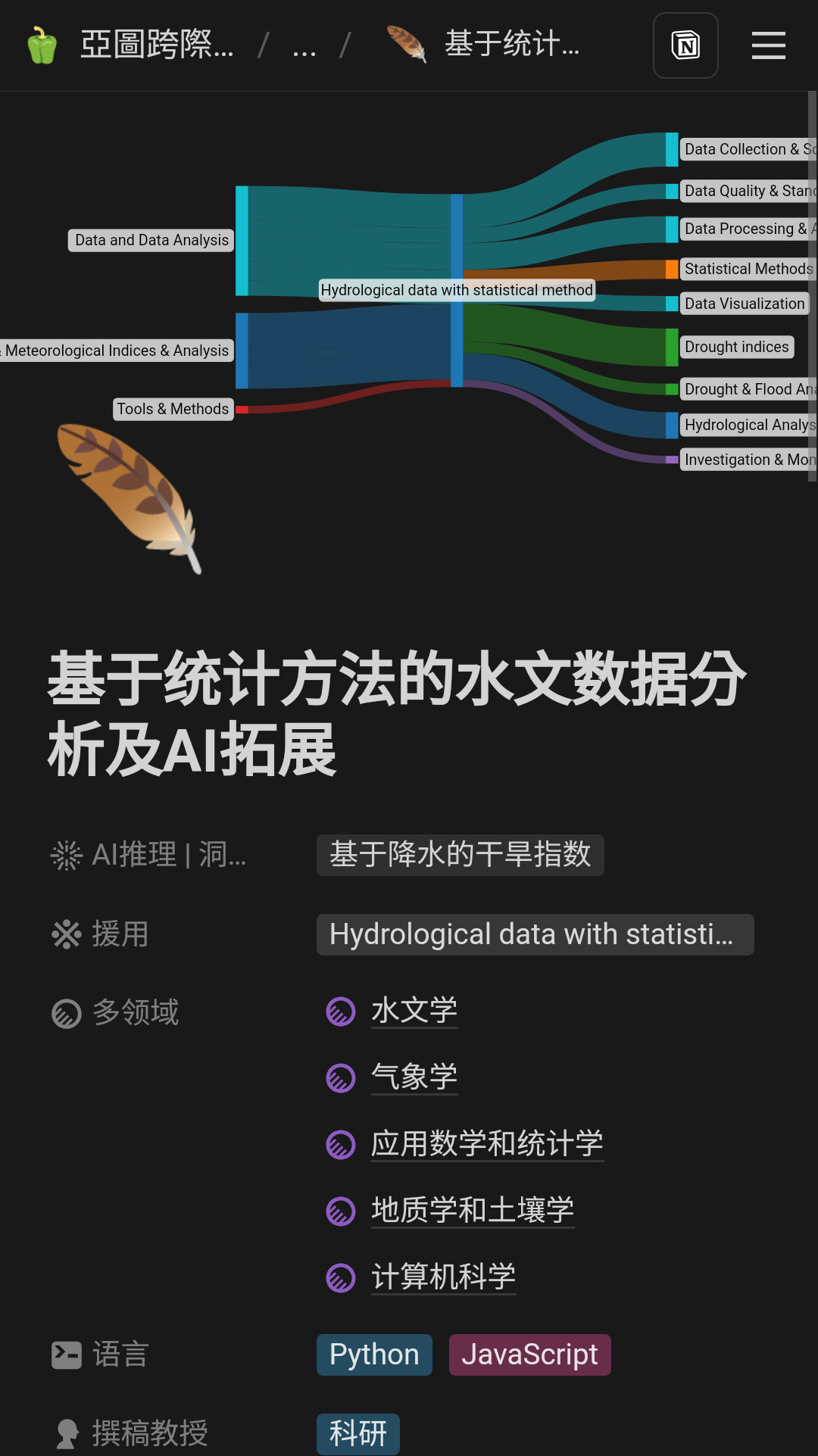
一个关键的应用在于水文指数的开发,这些指数提供了水可用性和干旱情况的标准衡量。统计方法提供了一个强大的视角,通过它可以分析水文数据,揭示隐藏的模式和趋势。通过应用这些技术,我们可以获得关于水的可用性、变异性和潜在风险的宝贵见解。本质上,统计方法为分析水文数据提供了一个稳健且通用的框架,使我们能够更好地理解和管理我们的水资源。通过利用这些技术,我们可以为可持续的水资源管理和减轻极端水文事件的影响做出
1. 声音合成:1. :dart:波形和振荡器代码实现,绘图和声音播放::pen:三角形、锯齿波和方波振荡器声音合成 | :pen:环形声音调制器,输出立体声 | :pen:声音幅度调制 | :pen:声音频率调制 | :pen:振荡器相位调制 | :pen:加法合成:带限锯齿波、方波、三角波和随机波形振荡器 | :pen:带限查表三角波、随机波振荡器 | :pen:粒度合成 | :pen:减法合
1. 使用SSH 的纯Python包Paramiko 访问单台设备和多台设备2. 使用Jinja2 IP地址管理3. 使用多供应商 SSH Python 库netmiko提升管理权限和公私密钥4. 使用网络配置协议工具Netconf和ncclient 网络设备链接管理,提取,修改配置以及响应事件5. NAPALM自动化复杂多供应商网络管理:不同设备连接,向设备发出命令,测试,网络备份,设备配置,收
在此,我们将测试两个类似的MATLAB和Python脚本,因为它们执行了一些基本的振动分析。这些脚本执行以下操作:载入两列CSV绘制所有数据计算并绘制移动的1秒RMS电平计算并绘制FFT可以下载MATLAB和Python函数以及分析中使用的振动数据文件。我们将研究范围从数万个点到数千万个的数据集。编程背景Python一般而言,Python的优点是免费,开源且用途更广。 他们的NumPy和SciPy