- @jdjhcn
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
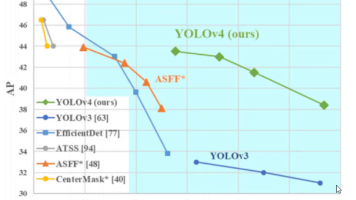
目标检测作为计算机视觉领域的核心任务之一,旨在从图像或视频中精确定位并识别出特定目标的类别与位置。随着深度学习技术的快速发展,基于卷积神经网络(CNN)的目标检测算法在精度和效率上取得了显著突破。其中,YOLO(You Only Look Once)系列模型因其“单阶段检测”的设计理念和实时性优势,成为工业界与学术界广泛关注的研究热点。自YOLOv1提出以来,该系列算法通过迭代优化网络结构、损失函
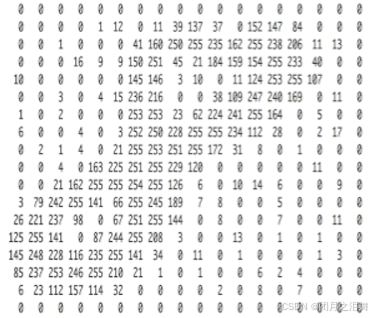
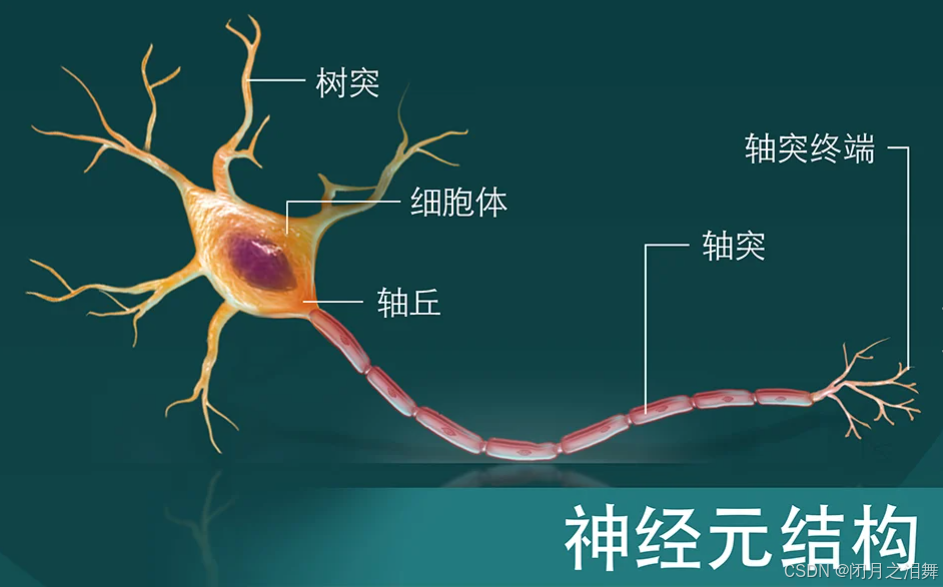
CNN 的灵感最初源于生物学研究。生物学家休博尔和维瑟尔在探索猫视觉皮层时发现,皮层细胞存在精妙构造,每个细胞只对视觉输入空间的特定小区域 “情有独钟”,这个特殊区域就叫感受野。受此启发,科研人员开始构建模拟视觉处理的神经网络模型。1998 年,纽约大学的 Yann Lecun 推出了 LeNet-5,正式提出卷积神经网络。它本质上是多层感知机(MLP)的 “升级版”,但独特之处在于采用了局部连接
感知器(Perceptron)是神经网络发展历程中的基础模型,由美国科学家 Frank Rosenblatt 在 1957 年提出。它模拟了生物神经元的工作方式,是构建更复杂神经网络的基石。感知器虽然是神经网络的基础,但它存在一定的局限性:只能处理线性可分问题:感知器只能对线性可分的数据进行分类,对于线性不可分的数据(如异或问题),感知器无法收敛到一个正确的解。缺乏隐藏层:简单感知器没有隐藏层,这
处理非线性问题:通过多层隐藏层和非线性激活函数,BP 网络可拟合任意复杂的非线性映射(万能近似定理)。梯度消失问题:早期 BP 网络使用 Sigmoid/Tanh 激活函数时,深层网络的梯度会随着反向传播逐渐衰减,导致底层参数更新缓慢(可通过 ReLU 激活函数、批量归一化、残差连接等缓解)。监督学习:需标注数据训练,依赖损失函数的梯度计算。
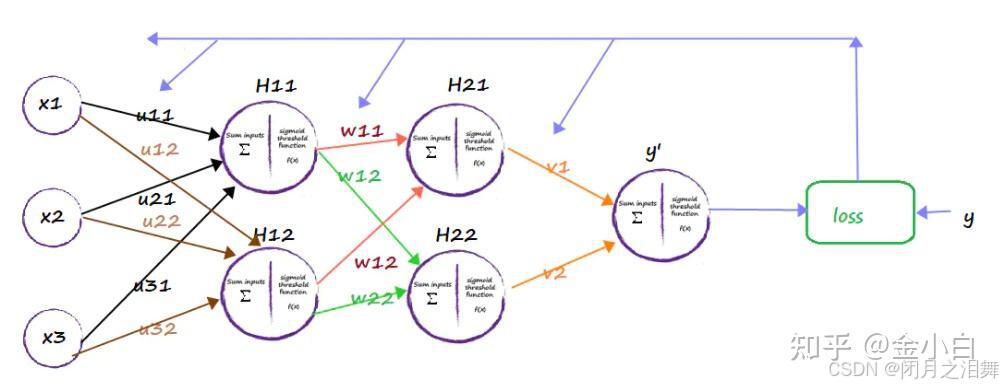
神经网络入门是理解人工智能的核心基础,它通过模拟人脑神经元的工作方式,构建多层连接的数学模型,学习从数据中提取特征并进行预测。简单来说,神经网络由输入层接收数据(如图像或文本),经过隐藏层逐层加权计算和非线性激活,最终由输出层给出结果(如分类或预测)。入门可从感知机、激活函数、反向传播等基础概念入手,逐步掌握其在图像识别、自然语言处理等场景的应用逻辑。神经网络的基本结构是由输入层接收数据,通过隐藏
损失函数在神经网络中充当核心导航者,通过量化预测与真实值的差异,为模型训练明确优化目标(如最小化误差)。它不仅评估当前性能,还通过反向传播计算梯度,指导参数调整方向,确保任务适配(如分类用交叉熵、回归用均方误差),并可通过正则化项控制模型复杂度,防止过拟合,是驱动整个学习过程的关键机制。损失函数在神经网络中反映的是模型预测结果与真实标签之间的差异程度,损失函数将模型的预测(如分类概率、回归值)与真
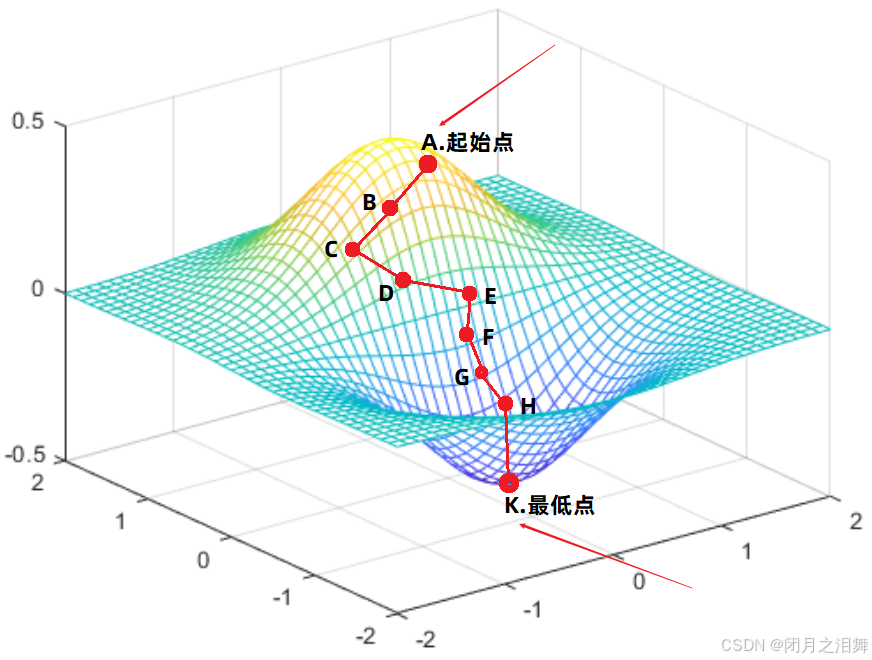
处理非线性问题:通过多层隐藏层和非线性激活函数,BP 网络可拟合任意复杂的非线性映射(万能近似定理)。梯度消失问题:早期 BP 网络使用 Sigmoid/Tanh 激活函数时,深层网络的梯度会随着反向传播逐渐衰减,导致底层参数更新缓慢(可通过 ReLU 激活函数、批量归一化、残差连接等缓解)。监督学习:需标注数据训练,依赖损失函数的梯度计算。
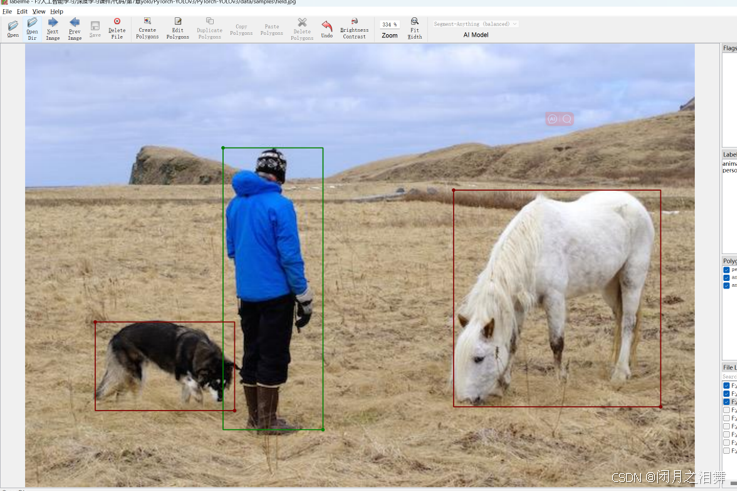
在YOLO等目标检测模型中,对图片进行打标的核心目的是为监督学习提供训练数据,通过标注目标物体的边界框和类别标签,使模型能够学习识别和定位目标的规律。打标数据为模型训练提供监督信号,通过对比预测结果与真实标注值,计算定位损失、分类损失和置信度损失,驱动模型参数优化;同时,标注数据也是评估模型性能(如mAP、精度、召回率)的基础,确保模型在多样场景(如多尺度目标、遮挡、复杂背景)中具备泛化能力。此外
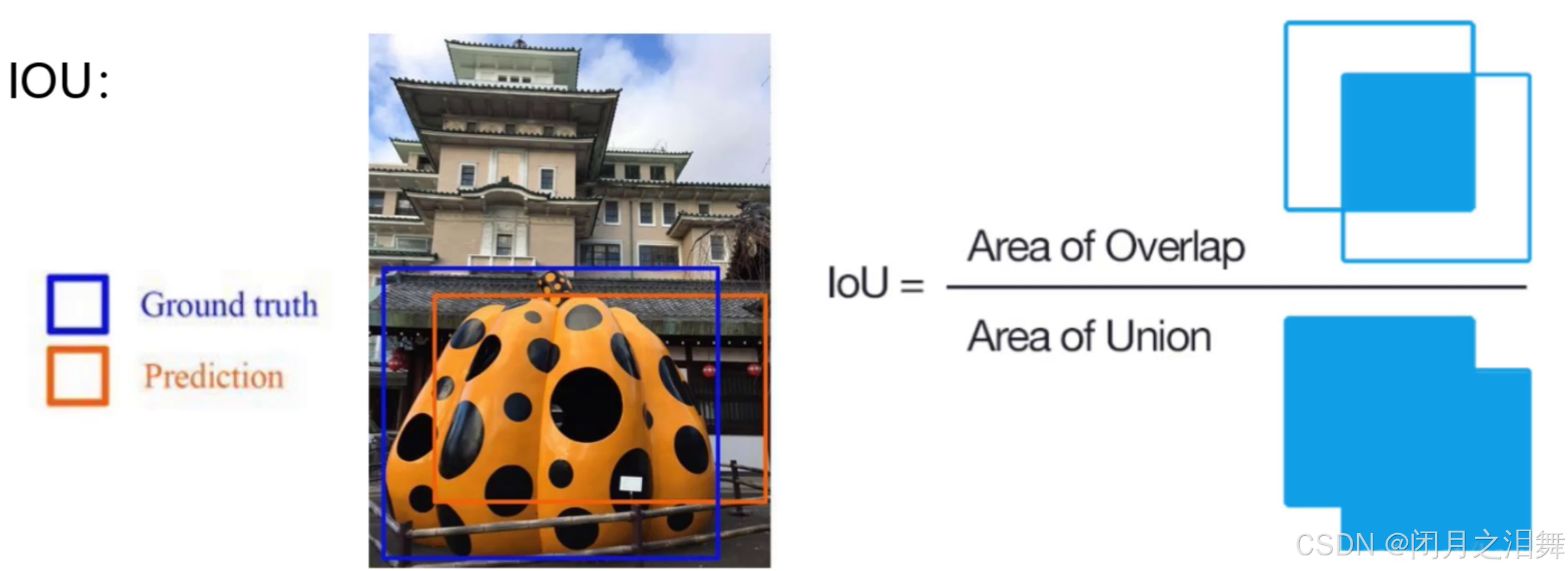
不同类型的模型,评估指标各有侧重。分类模型中,准确率反映预测正确的整体比例;精确率关注预测正例中实际正例的占比;召回率衡量实际正例被正确预测的程度;F1 值综合精确率与召回率,适合样本不均衡场景。回归模型里,均方误差计算预测值与真实值误差平方的均值,能体现平均差异;平均绝对误差以误差绝对值平均,对异常值敏感度低;聚类模型中,轮廓系数综合凝聚度和分离度,值近 1 代表聚类佳。那么我们今天学习的YOL
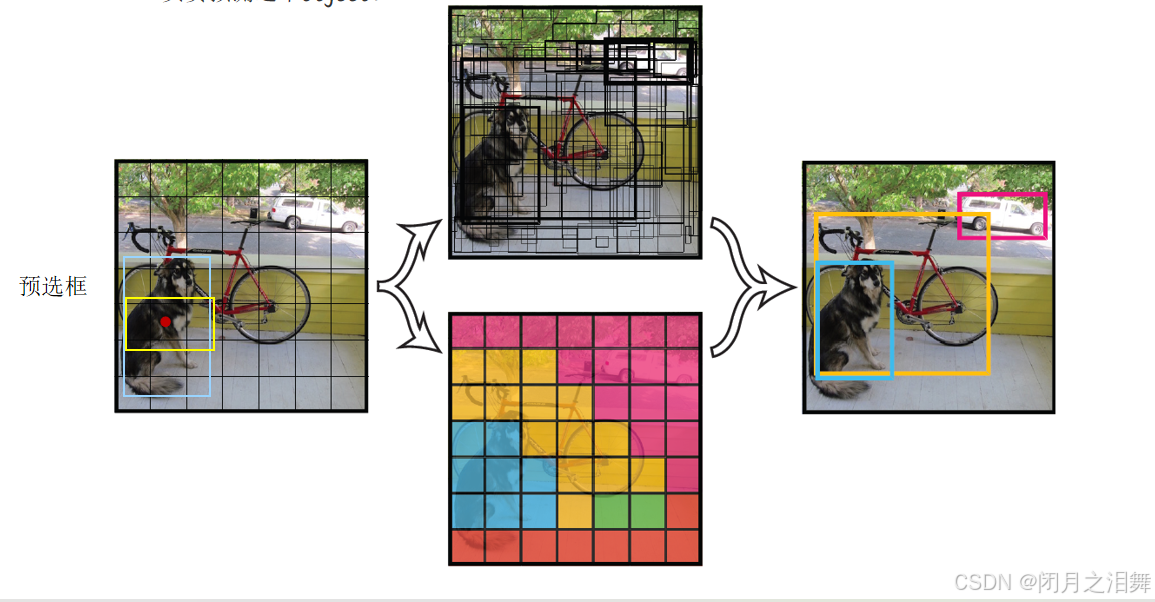
YOLO(You Only Look Once)算法是一种目标检测算法,是经典的one-stage方法。YOLO v1 开创了单阶段目标检测的先河,其简洁的架构和高效的推理为后续版本(YOLOv2-v8)奠定了基础。尽管存在小目标检测和定位精度的局限性,但其“端到端”的设计思想深刻影响了目标检测领域的发展。YOLO-v1通过回归思想革新了目标检测流程,以速度和全局信息优势成为实时检测的里程碑。