- @hiram_zhang
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
PS:原文出自我的知乎文章https://zhuanlan.zhihu.com/p/462607330由于SLAM是一个错综复杂的研究领域,涉及到非常多的关键技术。这里先讲讲学习方法论,然后对一些关键性概念(包括SLAM、ROS、SLAM移动机器人)进行分析,最后给出典型应用案例方便大家进行实战。0.学习方法论关于SLAM学习方法论,我觉得可以用"螺旋上升"这四个字来概括,大家可以根据自己的喜好和
第4章_机器人传感器4.1 惯性测量单元4.2 激光雷达4.3 相机4.4 带编码器的减速电机
【第1季】0.第0章_SLAM发展综述-视频讲解【第1季】0.1.第0章_SLAM发展综述-梳理定位导航技术-视频讲解【第1季】0.2.第0章_SLAM发展综述-揭秘SLAM技术路线-视频讲解【第1季】0.3.第0章_SLAM发展综述-展望SLAM未来趋势-视频讲解先 导 课第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法第 2 季 : 详 细 推 导 数 学 公 式 与 代 码
立体障碍物是机器人导航中很头疼的一个问题,因为2D激光雷达只能扫描某个平面内的障碍物,对于高于或低于扫描平面的障碍物是无法探测的。但将机器人的全身都覆盖上传感器显然不现实,并且传感器本身也有探测距离和视角的盲区问题。riskrrt的特别之处体现在对动态障碍物的处理更加严格,在走廊、机场、路口等人流量大的场景中对机器人与动态障碍物发生碰撞的风险把控更加严格,这种对动态障碍物碰撞的风险把控通过基于风险
第4章_机器人传感器4.1 惯性测量单元4.2 激光雷达4.3 相机4.4 带编码器的减速电机
视频讲解【先导课】1.课程大纲-视频讲解【先导课】1.1.课程大纲-学习思维导图(上)-视频讲解【先导课】1.2.课程大纲-学习思维导图(下)-视频讲解【先导课】1.3.课程大纲-全书内容速览-视频讲解【先导课】1.4.下集预告-视频讲解先导课:课程大纲先 导 课第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析第
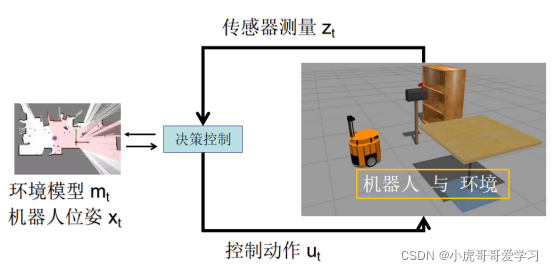
互联网和人工智能技术可以看成是对人类大脑的进一步延展,而机器人技术则可以看成是对人类躯体的进一步延展。如果人工智能技术仅仅停留在虚拟的网络和数据之中,那么其挖掘并利用新知识的能力将很难扩展开来。可以说,机器人是人工智能技术应用能力的有效延展,而能自主移动的机器人更是极大地拓展了人工智能技术的应用范围。SLAM导航技术正是当下实现机器人自主移动的热门研究领域,也是本书内容的核心所在。
ROS究竟是啥ROS发行版本ROS学习方法①ROS是一个分布式通信框架(最核心的本质)②ROS是一个开发工具的集合③ROS是一系列开源软件包。
PS:原文出自我的知乎文章https://zhuanlan.zhihu.com/p/455620179伴随着人工智能、机器人、无人驾驶等技术的蓬勃发展,越来越多的相关智能产品出现在了我们的日常生活中,作为底层技术基石之一的SLAM也逐渐被大家所熟知。下面通过“机器人对于人类的意义”、“机器人为什么需要SLAM技术”和“搭载SLAM算法的机器人有哪些用途”这样三个问题,来探讨SLAM在机器...
SLAM+语音机器人DIY系列:(三)感知与大脑——2.带自校准九轴数据融合IMU惯性传感器摘要在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑...