




- @hhaowang
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了如何利用轻量级工具Ollama在Windows环境下本地部署Qwen3.5-9B-DeepSeek-V4-Flash多模态大模型,重点解决企业数据隐私和推理延迟问题。文章详细讲解Ollama的安装配置、GGUF量化模型选择(涵盖BF16/Q4_K_M/Q5_K_M等不同精度)、模型加载与交互测试全流程,提供硬件适配建议和性能对比数据。通过实际案例展示文本生成、长上下文处理和多模态图文交互

针对石化防爆场景中巡检数据量大、人工分析效率低、报告生成不规范等痛点,本文设计并实现了一套多模态大模型驱动智能分析引擎的服务端组件。该系统以每日生成的巡检CSV文件为数据中枢,通过时间窗口采样、统计特征提取、本地大模型推理及自动化PDF渲染,将巡检机器人采集的可见光、热红外、气体传感器等多模态异构数据转化为结构化、可审计的智能分析报告。

什么是麦克纳姆轮在竞赛机器人和特殊工种机器人中,全向移动经常是一个必需的功能。「全向移动」意味着可以在平面内做出任意方向平移同时自转的动作。为了实现全向移动,一般机器人会使用「全向轮」(Omni Wheel)或「麦克纳姆轮」(Mecanum Wheel)这两种特殊轮子。全向轮与麦克纳姆轮的共同点在于他们都由两大部分组成:轮毂和辊子(roller)。轮毂是整个轮子的...
本文详细介绍了Jetson Xavier NX开发板的刷机教程。主要内容包括:1)通过短接FC_REC和GND引脚进入Recovery模式;2)刷机前的软硬件准备要求;3)使用SDKManager进行系统烧录的完整步骤;4)常见问题解决方法。文章重点讲解了从进入刷机模式到完成系统初始化的全过程,包括版本选择、存储配置等关键环节,并针对设备识别、烧录失败等问题提供了解决方案。适用于需要在Jetson
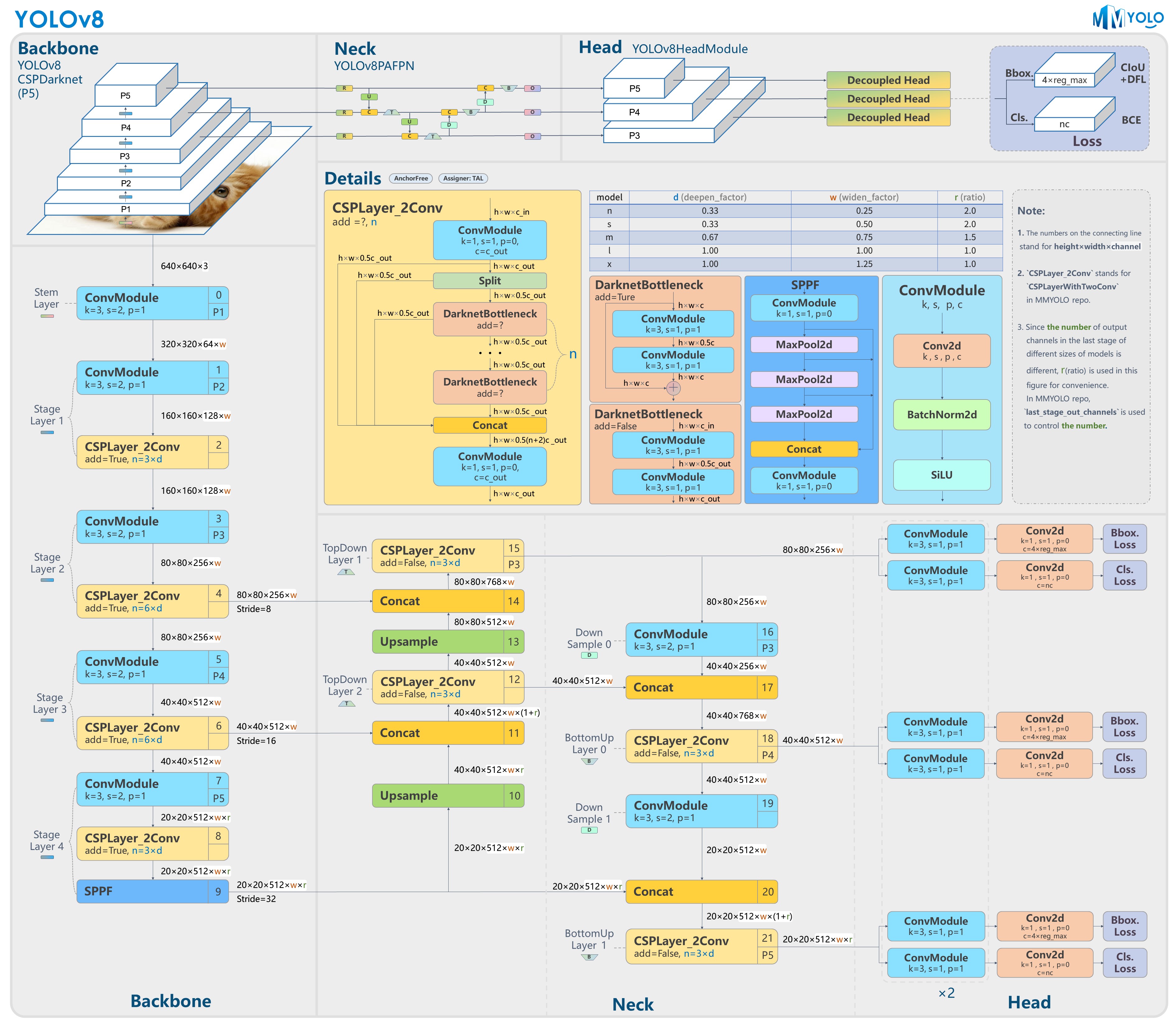
1.提供了一个全新的 SOTA 模型,包括 P5 640 和 P6 1280 分辨率的目标检测网络和基于 YOLACT 的实例分割模型。和 YOLOv5 一样,基于缩放系数也提供了 N/S/M/L/X 尺度的不同大小模型,用于满足不同场景需求骨干网络和 Neck 部分可能参考了 YOLOv7 ELAN 设计思想,将 YOLOv5 的 C3 结构换成了梯度流更丰富的 C2f 结构,并对不同尺度模型调
视觉-惯导多传感器融合(1)IMU & ROS_Techblog of HaoWANG-CSDN博客IMU,全称inertial measurement unit,即惯性测量单元,主要用于测量自身位姿,位姿包含位置和姿态。https://haowang.blog.csdn.net/article/details/121249997目录1. 数据采集2. 数据回放3. 滤波去噪4. 绘制曲线

一、编码器简介编码器是一种广泛使用的位置式传感器,它能够检测细微的运动,其输出为数字信号。编码器中应用最为广泛的就是光电编码器,可以用来进行角度的测量。可以用来测量位置,测量转速。【wiki https://zh.wikipedia.org/wiki/%E6%97%8B%E8%BD%89%E7%B7%A8%E7%A2%BC%E5%99%A8】旋转编码器(rotary encode...
本文介绍了YOLOv8模型从训练到ONNX量化部署的完整流程。主要内容包括:1)环境准备与模型导出为ONNX格式;2)ONNX模型的FP16/INT8量化方法;3)使用ONNXRuntime和TensorRT的部署实现;4)性能优化策略如IO绑定和批处理;5)完整的部署脚本和注意事项。该方案支持静态和动态输入尺寸,提供多种量化精度选择,并包含基准测试功能,适用于边缘计算和嵌入式设备部署场景。
干货:变成计算机视觉大师,需要经历的几个阶段计算机视觉(Computer vision)是一门研究如何使机器“看”的科学,更进一步的说,就是指用摄影机和计算机代替人眼对目标进行识别、跟踪和测量等机器视觉,并进一步做图像处理,用计算机处理成更适合人眼观察或进行仪器检测的图像。学习和运算能让机器能够更好的理解图片环境,并且建立具有真正智能的视觉系统。当下环境中存在着...
1. 机器人视觉机器人视觉研究的核心内容是:视觉定位与导航、路径规划、避障、多传感器融合。视觉定位技术有多种,包括单目视觉、双目视觉、多目视觉、RGB-D等,后三种方法可以使图像具有深度信息,这些视觉“眼睛”亦可以称为VO--视觉里程计。VO在机器人乃至计算机视觉问题中,是一个通过分析处理相关图像序列来确定机器人的位置和姿态的解决方案。现今,随着计算机图像处理技术的不断进步以及传感器电子科...