- @helloworld_Fly
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文已经首发在个人微信公共号:计算机视觉life(微信号CV_life),欢迎关注!国内/外每年都会举办很多计算机视觉(Computer Vision,CV)、 机器学习(Machine Learning,ML)、人工智能(Artificial Intelligence ,AI)领域相关的很多学...
class KMEANS:def __init__(self, n_clusters=10, max_iter=None, verbose=True, device=torch.device("cpu")):# self.n_cluster = n_clustersself.n_clusters = n_clustersself.labels = Noneself.dists = None# sh
1.传统边缘检测实行卷积操作,传统图像边缘检测一般使用卷积操作。方法为:使用f*f大小的过滤器与输入相乘并累加,通过在输入数据上滑动操作,实现卷积过程。 可水平检测也可垂直检测,过滤器参数需要手工设定,检测能力有限。2.卷积神经网络分为:卷积层、池化层、全连接层和分类器.特点:将过滤器中参数作为变量,与输入进行卷积操作,从而
修改镜像源anaconda:TUNA 还提供了 Anaconda 仓库与第三方源(conda-forge、msys2、pytorch等,查看完整列表)的镜像,各系统都可以通过修改用户目录下的 .condarc 文件。Windows 用户无法直接创建名为 .condarc 的文件,可先执行 conda config --set show_channel_urls yes 生成该文件之后再修改。注:由
文章目录前言简介灰度变化线性变换指数对数直方图直方图均衡化空间滤波低通滤波高通滤波前言数字图像处理是计算机视觉的基础,许多经典的图像处理方法也在深度学习领域的模型结构设计思路有着借鉴,所以在此归纳学习内容,用简单的语言表达其思想。至于有效的使用经验、方法的原理公式,可以在《数字图像处理》冈萨雷斯版中寻找答案,内容太全面,且很多使用经验直接提供。简介灰度图是图像的基础,由0~255像素值组成,常见的
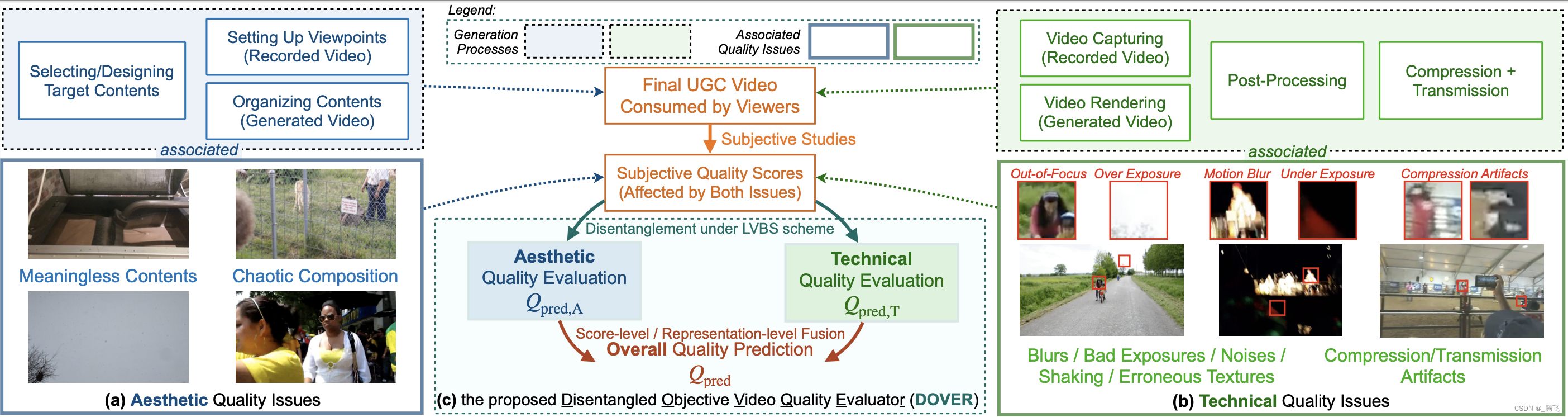
在最近的视频质量评价竞赛中,我很幸运地取得了倒数第二名的成绩。在这篇博客中,我将分享我的经验和教训,希望能对其他想要参加类似比赛的人有所帮助。
考虑我们上一节介绍的平稳分布为标准高斯分布的马尔科夫链的连续版本:随机微分方程(SDE)。前向过程就是一个不断加噪声的SDE,它唯一对应了一个逆向过程(reverse SDE),其中的未知量只有每一时刻的score function:所谓的“去噪模型”与score function其实是等价的loss,这其实只需要用denoising score matching的一个性质就可以证明。
常见原因-1一般来说,出现NaN有以下几种情况:相信很多人都遇到过训练一个deep model的过程中,loss突然变成了NaN。在这里对这个问题做一个总结:1.如果在迭代的100轮以内,出现NaN,一般情况下的原因是因为你的学习率过高,需要降低学习率。可以不断降低学习率直至不出现NaN为止,一般来说低于现有学习率1-10倍即可。2.如果当前的网络是类似于RNN的循环神经网络的话,出现NaN可能是
代码】pytorch之transforms(numpy数据类型转化为tensor,归一化、resize)
在完成比赛后,确实有些遗憾,如果早点参加,能进行验证集的验证,可能会更有针对性的调整模型和方法。经过调研发现,最新的方法,排名高的方法不一定有效,很多论文就是噱头大于实用性,要有批判性看待;不要只看对应领域工作,要根据baseline的预测结果找到模型存在的普遍问题,根据问题找相关论文和方法,进行模型或者策略的改进,不要一上来就调参,走不远;比赛看的是单位时间内谁能有效提高,重点是高效的训练和分析