- @ghxufMuht
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
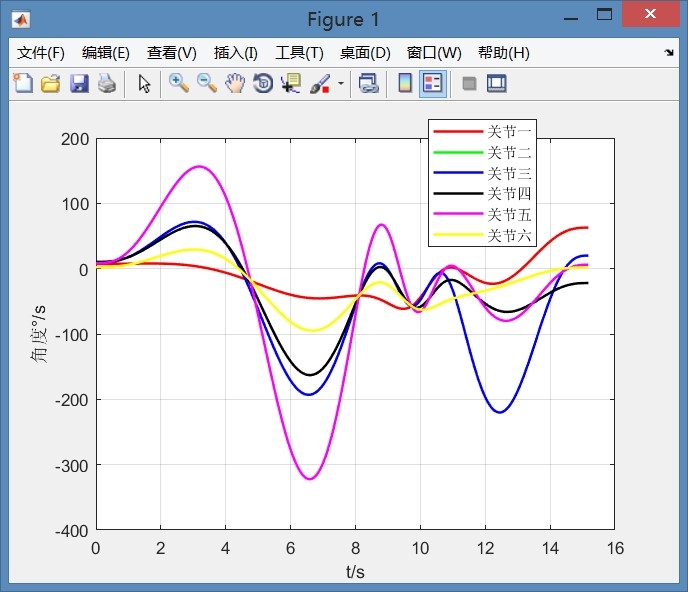
机械臂关节空间轨迹规划matlab,B样条轨迹规划算法,三次非均匀,五次非均匀B样条,七次非均匀B样条轨迹规划在机械臂的控制领域中,轨迹规划是至关重要的一环,它直接影响着机械臂运动的平稳性、准确性以及效率。今天咱们就来唠唠利用 Matlab 实现机械臂关节空间的 B 样条轨迹规划,特别是三次非均匀、五次非均匀和七次非均匀 B 样条轨迹规划。
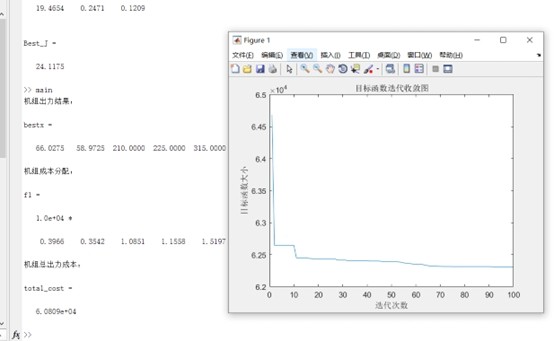
基于粒子群算法的最优潮流以IEEE30节点的输电网为研究对象 以系统发电成本最小为目标函数 以机组出力为优化变量 其中出力与成本的关系是经典的二次函数关系通过优化求解得到最佳机组出力。基于粒子群算法的最优潮流以IEEE30节点的输电网为研究对象 以系统发电成本最小为目标函数 以机组出力为优化变量 其中出力与成本的关系是经典的二次函数关系通过优化求解得到最佳机组出力。先理清楚问题核心:6台发电机在不
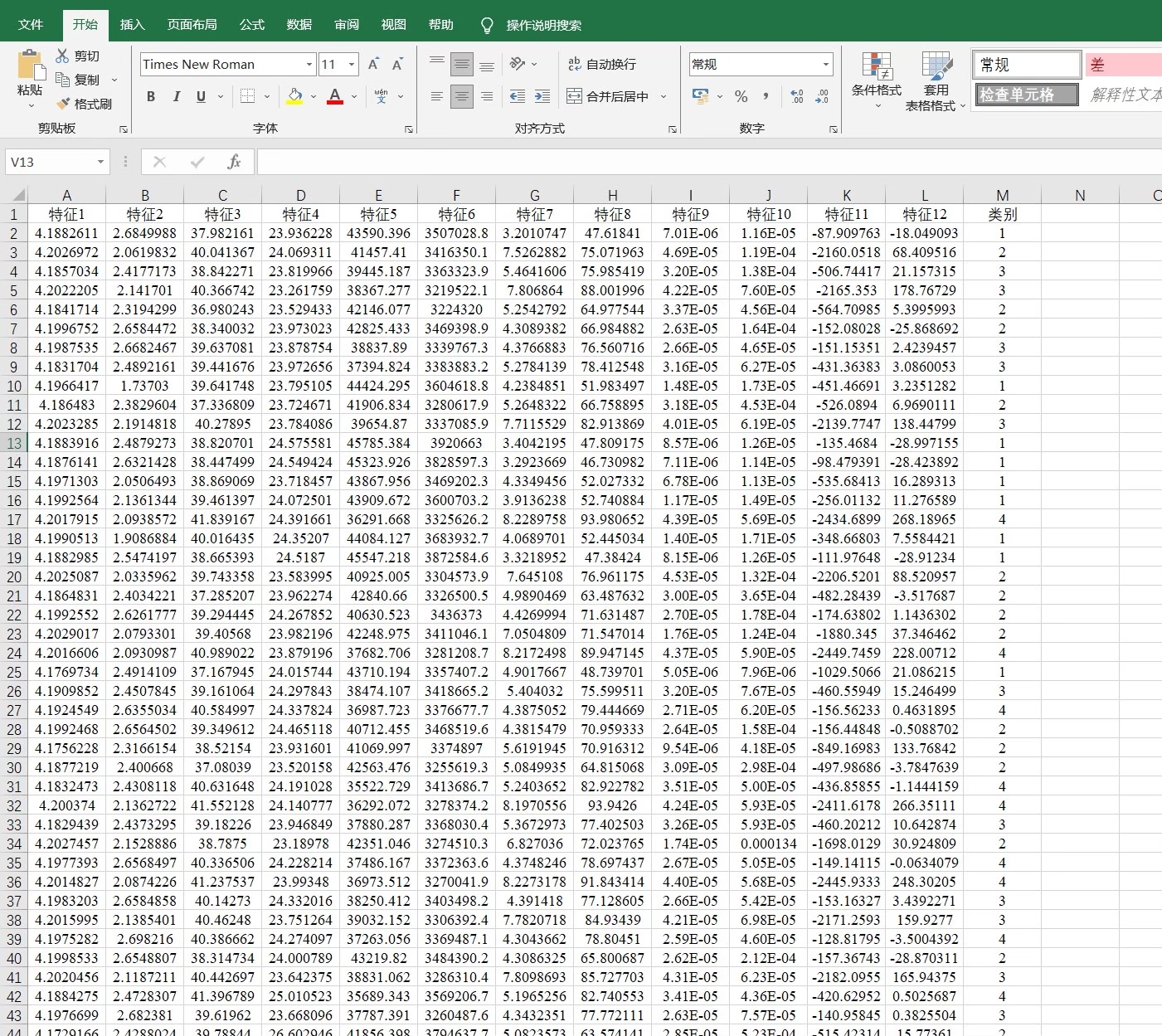
CNN-LSTM-Attention基于卷积-长短期记忆神经网络结合注意力机制的数据分类预测 Matlab语言程序已调试好,无需更改代码直接替换Excel即可运行1.多特征输入,LSTM也可以换成GRU、BiLSTM,Matlab版本要在2020B及以上。2.特点:[1]卷积神经网络 (CNN):捕捉数据中的局部模式和特征。[2]长短期记忆网络 (LSTM):处理数据捕捉长期依赖关系。[3]注意力
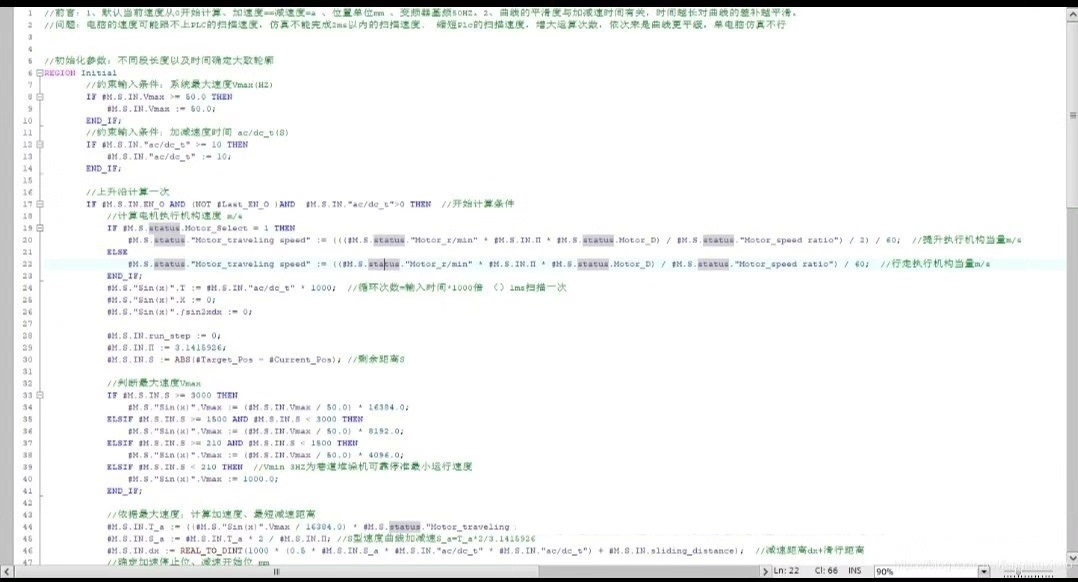
运动控制部分是堆垛机控制的核心。本程序采用西门子S7-1500 PLC的高性能运动控制功能,通过精确的伺服控制和PID调节,实现了对堆垛机运动的高精度控制。在算法中,我们考虑了堆垛机的负载、运行距离、加速度等因素,通过精确计算,实现了对堆垛机速度的精准控制。在编写过程中,我们遵循了西门子PLC的编程规范和最佳实践,确保了程序的稳定性和可读性。通过专门的仿真软件,可以在电脑上模拟堆垛机的运行环境,对
这个软件的设计思路是模块化的,每个工具都是独立的 DLL,主程序通过统一的接口来加载和调用这些工具。至于算法工具,种类还挺多的,图像处理、检测识别、标定工具、对位工具、几何工具、几何测量、三维检测、逻辑工具、通讯工具和系统工具,基本涵盖了视觉处理的常见需求。算法工具包含图像处理、检测识别、标定工具、对位工具、几何工具、几何 测量、三维检测、逻辑工具、通讯工具和系统工具。算法工具包含图像处理、检测识

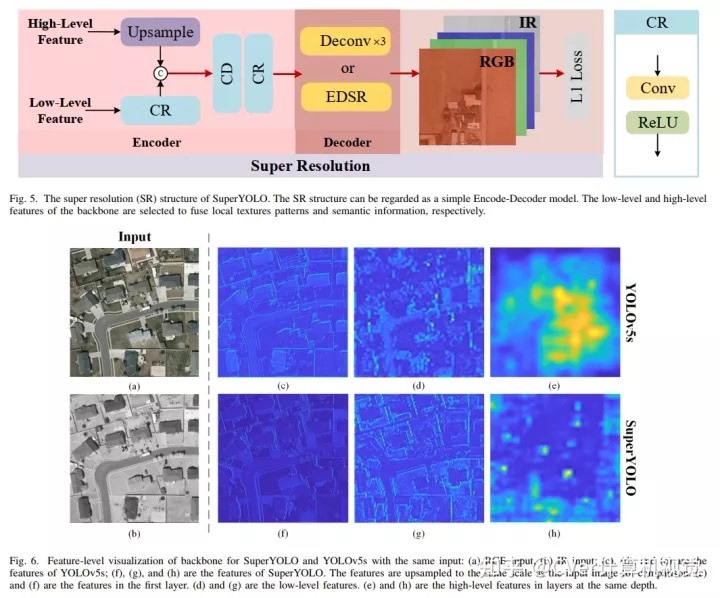
最后放个精度对比彩蛋:在DOTA遥感数据集上,同样的YOLOv8框架,加入SuperYOLO改进后,mAP从63.1直接飙到71.4。这里有个细节处理很妙——不同模态的特征先各自过SPPF金字塔池化,再做通道注意力融合,比粗暴concat后再处理省了三分之一的显存。支持yolov5,YOLOv7,YOLOv8优化改进,加入注意力机制多尺度,transform等提升精度。支持yolov5,YOLOv
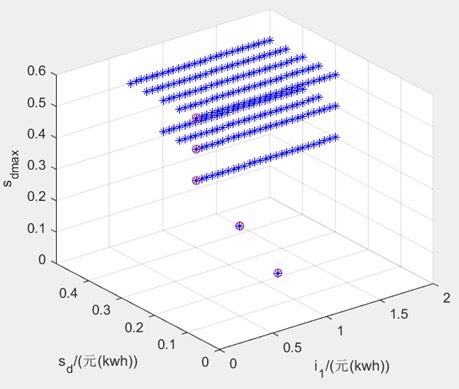
MATLAB代码:基于非合作博弈的多微网P2P交易策略研究关键词:微网 P2P交易 非合作博弈 交易电价参考文档:《基于博弈论的多微电网系统交易模式研究》完全复现仿真平台:MATLAB 平台优势:代码具有一定的深度和创新性,注释清晰,非烂大街的代码,非常精品!
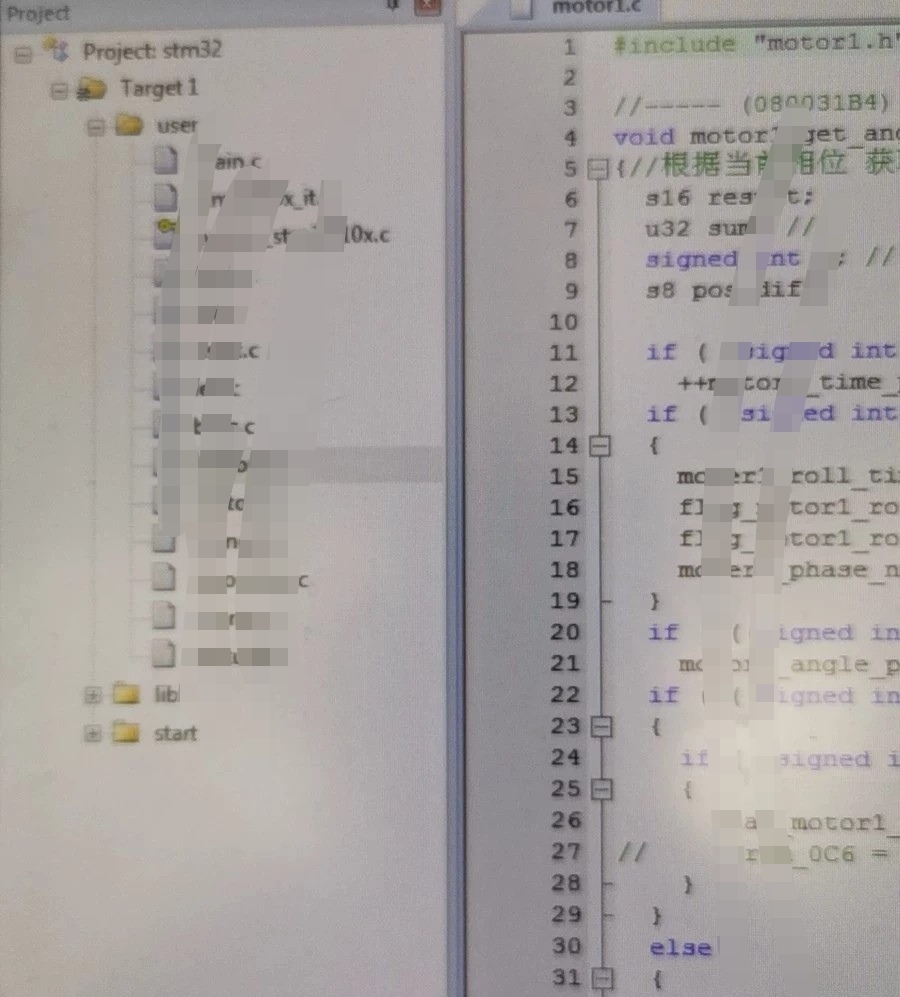
商用两轮平衡车量产源码方案源码及方案一经发出,概不退换~可以用于量产~可以直接免修改将主板改成无刷电机控制器~可加遥控~得此源码嘿,各位技术爱好者们!今天来聊聊超酷的商用两轮平衡车量产源码方案,这可是个好东西,一旦拥有,说不定就能在平衡车市场闯出一片天呢!
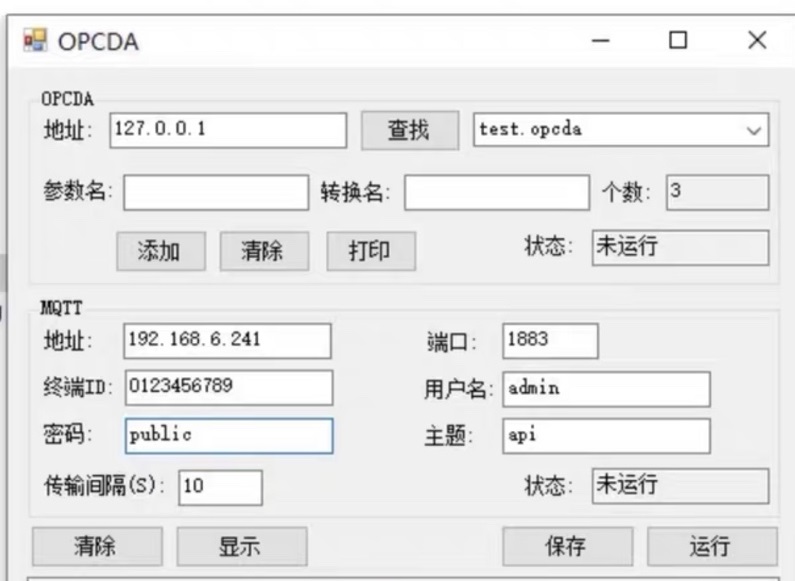
本程序是一款基于C# Windows Forms开发的OPCDA客户端工具,核心功能是实现从OPCDA服务器采集数据,并通过MQTT协议将数据上传至指定服务器。程序依赖OPCDAAuto.dll组件实现OPC通信,通过MQTTnet库处理MQTT协议交互,支持配置参数持久化存储和运行日志记录,整体设计围绕工业数据采集与转发的核心需求展开。
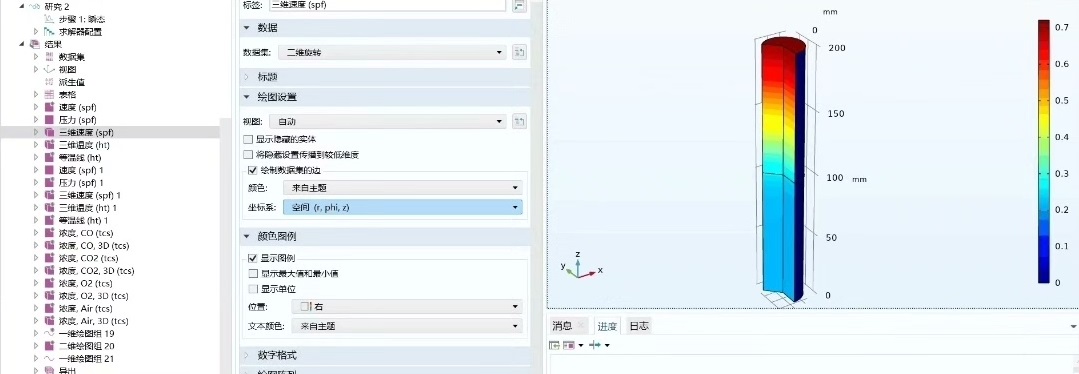
comsol多孔介质流燃烧器模型,集层流流动模块,流体传热模块,浓物质传递模块和化学反应模块于一体,四场耦合,多物理场涉及非等温流动场,反应流场。经实测可以精确的模拟燃烧流动耦合的仿真结果,适用于CH4,H2,CO等可燃性气体,仅需替换反应方程带入实测数据就完全可以复现仿真算法。本模型曾发过EI准确性、收敛性高在工程和科研领域,对于燃烧现象的精确模拟一直是个热门话题。