




- @electech6
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
点击上方“计算机视觉life”,选择“星标”快速获得最新干货1. 摘要最近,伦敦大学学院开源了面向对象的SLAM系统DSP-SLAM,它为前景对象构建了一个丰富而精确的稠密3D模型的联合地图,并用稀疏的地标点来表示背景。可以在3种不同的输入模式下以每秒10帧的速度工作:单目、双目或双目+激光雷达。与最近基于深度先验的重建方法相比,物体姿态和形状重建有了改进,并减少了KITTI数据集上的相机跟踪漂移
图像分割是计算机视觉研究中的一个经典难题,已经成为图像理解领域关注的一个热点,图像分割是图像分析的第一步,是计算机视觉的基础,是图像理解的重要组成部分,同时也是图像处理中最困难的问题之一。所谓图像分割是指根据灰度、彩色、空间纹理、几何形状等特征把图像划分成若干个互不相交的区域,使得这些特征在同一区域内表现出一致性或相似性,而在不同区域间表现出明显的不同。简单的说就是在一副图像中,把目标从背景中分.
本文首发于公众号:计算机视觉life。原文链接:AR VR MR 到底有啥区别?介绍关于AR(Augmented Reality,增强现实)的一系列内容,我们很有必要对它的几个孪生兄妹:VR(Virtual Reality,虚拟现实)、MR(Mixed Reality,混合现实)也做一个介绍。它们都听起来差不多,那么到底它们之间有啥区别呢?虚拟现实 (VR)先来说说VR,因为VR最容易...
论文地址https项目地址https7月4日,ECCV2022放榜,今年共收到8000多篇投稿,其中1629篇论文被接收,接收率不到20%。上海人工智能实验室自动驾驶团队与上海交通大学严骏驰副教授团队合作的论文《ST-P3End-to-endVision-basedAutonomousDrivingviaSpatial-TemporalFeatureLearning》被ECCV2022接收。该论文
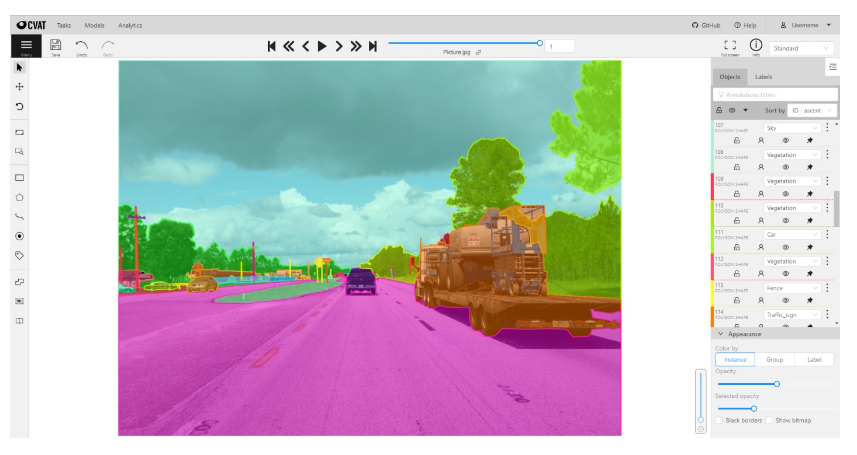
标注工具是处理原始数据的第一关,无论是检测任务、分割任务还是3D感知、点云等,都需要制作真值来监督网络学习。企业级的标注方案一般通过内部的自研工具或专业标注团队完成,而对于个人或小的团队来说,一款开源好用的标注工具则至关重要,自动驾驶之心为大家汇总了领域常用到的标注工具,涉及2D检测分割/3D检测分割以及多传感器的标定同步。...
最近看了一个关于国内AI的报告《中国新一代人工智能科技产业区域竞争力评价指数(2021)》,里面有一些有意思的趋势,给大家分享一下。评价方法和数据来源 首先说下评价指标,报告中的AI产业区域竞争力评价指标挺全面,包括 6 项一级指标、10 项二级指标,从数量和质量两个维度设立的24 项三级指标从图中看,覆盖了企业、学术、资本等多个维度,能考虑到的主要因素都在内了。那样本数据有多少呢?总共涉及220
很幸运参加了今年的valse年度盛会,valse是全球计算机视觉,模式识别,机器学习,多媒体技术等相关领域华人青年学者最具影响力的交流平台。随着valse名气越来越大,今年报名也特别火爆,早早就被注册满了。今年在武汉举办,由华科和武大承办。时间4月22日到24日。参加了三天会议,见识了计算机视觉,机器学习,模式识别,人工智能等领域学术界和工业界最前沿的技术成果,受益匪浅。于是趁热打铁,及时把自己
对于即将到来的人工智能时代,作为一个有理想有追求的程序员,不懂深度学习(Deep Learning)这个超热的领域,会不会感觉马上就out了?作为机器学习的一个分支,深度学习同样需要计算机获得强大的学习能力,那么问题来了,我们究竟要计算机学习什么东西?答案当然是图像特征了。将一张图像看做是一个个像素值组成的矩阵,那么对图像的分析就是对矩阵的数字进行分析,而图像的特征,就隐藏在这些数字规律中。深度.
本文已经首发在个人微信公共号:计算机视觉life(微信号CV_life),欢迎关注!国内/外每年都会举办很多计算机视觉(Computer Vision,CV)、 机器学习(Machine Learning,ML)、人工智能(Artificial Intelligence ,AI)领域相关的很多学术会议和研讨会等。在此把我所知道的2018年国内/外即将举办的CV和ML领域几个会议和研讨会列出来,