- @diUurpNYY
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
西门子PLC配KUKA机器人程序程序为西门子S7-1500PLC博途调试:西门子与KUKA机器人通讯;PLC控制KUKA机器人安全回路,设备安全装置控制;PLC与KUKA机器人信号交互,外部自动控制;PLC控制KUKA机器人干涉区zone逻辑;PLC控制KUKA机器人程序段segment逻辑;PLC控制SEW电机变频运动程序;PLC控制外围设备夹具动作;PLC系统有手动/自动/强制/空循环/多车型

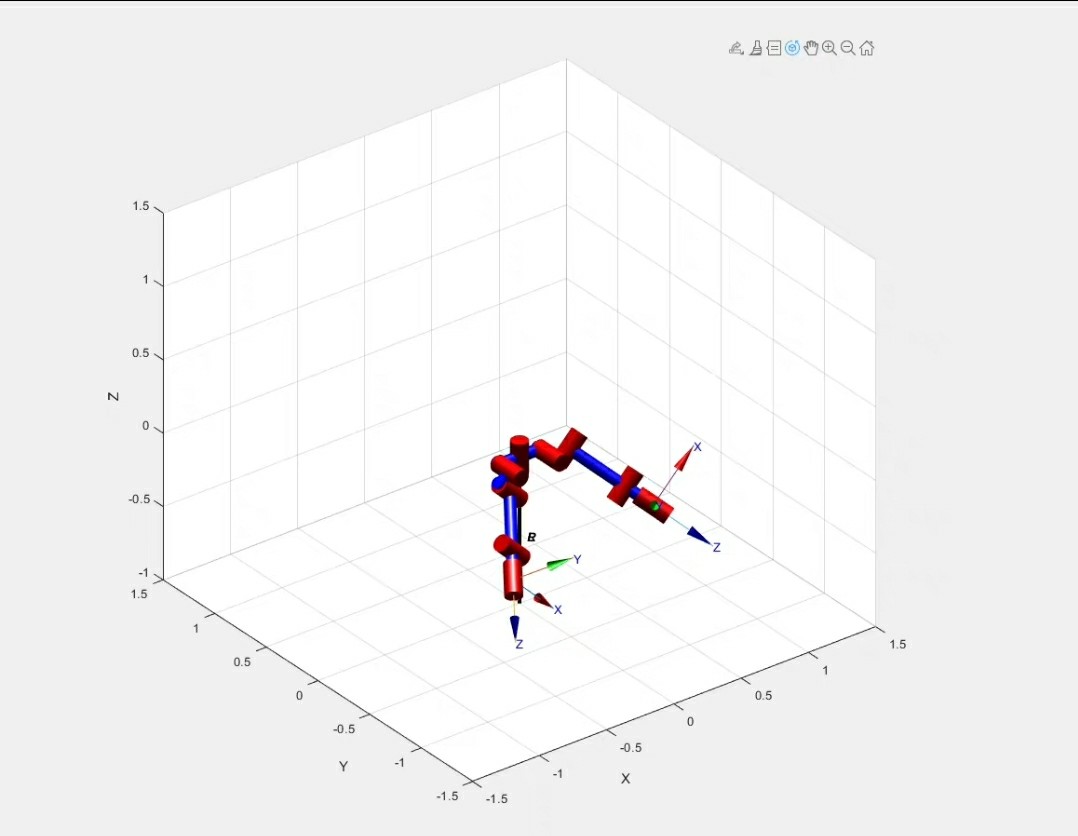
先上效果:左手拿水壶,右手端杯子,两机械臂配合完成倒水动作,运动轨迹平滑得像德芙巧克力。实际调试中发现,这样解算速度比全约束快3倍以上,特别适合对末端姿态没严格要求的场景。这方法虽然粗糙,但实测在10ms内就能完成检测,适合实时性要求高的场景。真要精确检测的话,得上Mesh模型,但那个计算量能让你怀疑人生。注意第4个关节的d参数故意给大点,模拟现实中的关节偏移,避免双臂碰撞。双臂机器人matlab
本课程基于Abaqus,应用两种加载方式一-FluidCavity与Pressure分别介绍了气动驱动软体机器人仿真分析流程。该软体机器人涉及两种材料,主变形部分选用超弹性材料,应用Yeoh本构定义材料属性;限制层部分定义为线弹性材料。此外,对结果的后处理进行了简要介绍。想学轮胎充气、气囊充气、各种充气分析都能用最近学习了一个超有意思的课程,基于Abaqus平台,深入探讨了气动驱动软体机器人的仿真
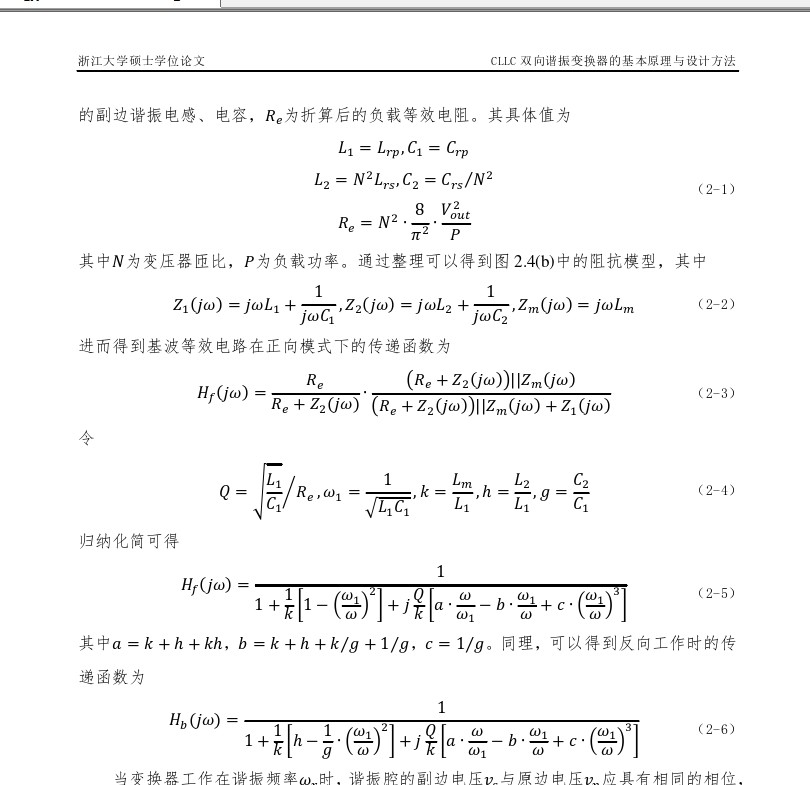
最近在搞V2G项目的硬件调试,发现双向CLLC谐振变换器真是电动汽车与电网互动的"宝藏电路"。(2)后级DC/DC电路:采用双向CLLC谐振变换器,谐振频率150kHz,采用PFM变频控制,且闭环输出电压360V,系统功率3.5kW。(2)后级DC/DC电路:采用双向CLLC谐振变换器,谐振频率150kHz,采用PFM变频控制,且闭环输出电压360V,系统功率3.5kW。(1)前级整流电路:采用双
先上效果:左手拿水壶,右手端杯子,两机械臂配合完成倒水动作,运动轨迹平滑得像德芙巧克力。实际调试中发现,这样解算速度比全约束快3倍以上,特别适合对末端姿态没严格要求的场景。这方法虽然粗糙,但实测在10ms内就能完成检测,适合实时性要求高的场景。真要精确检测的话,得上Mesh模型,但那个计算量能让你怀疑人生。注意第4个关节的d参数故意给大点,模拟现实中的关节偏移,避免双臂碰撞。双臂机器人matlab
本文深入剖析一套基于 C# 与 OpenCvSharp 构建的工业级机器视觉系统。该系统面向高精度定位、缺陷检测与模板匹配等典型工业应用场景,采用模块化、可配置化的设计理念,支持 Basler 等主流工业相机接入,并具备完整的配方管理、参数序列化、图像处理工具链及结果可视化能力。整体架构清晰,职责分明,适用于自动化产线中的视觉引导、质量检测与过程控制。该视觉系统是一个功能完备、架构清晰、扩展性强的
玩Halcon的老手都知道,它的HDevelop环境处理点云确实溜,但真要集成到C#里还得花点心思。别被官方文档吓到,多试错多调参,车间里那些平面度、圆柱度、位置度的检测需求,基本上都能摆平。说到3D测量,绕不开距离计算。halcon点云测量软件,3D测量软件,C#联合halcon视觉系统,通用视觉软件,通用点云处理软件,测量软件,3D视觉检测系统。halcon点云测量软件,3D测量软件,C#联合
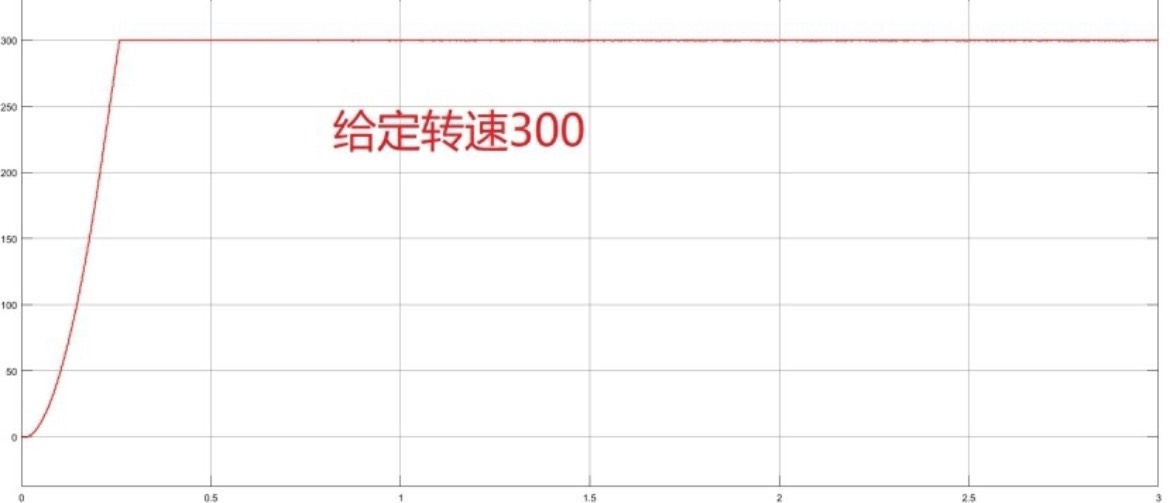
三相异步电机矢量控制仿真模型 simulink仿真,只有仿真任何版本都可在电机控制领域,三相异步电机因其结构简单、成本低、运行可靠等优点,被广泛应用于工业生产和日常生活中。而矢量控制技术能够实现对异步电机的高性能控制,让其在调速、转矩控制等方面有出色表现。今天,咱就来唠唠三相异步电机矢量控制的Simulink仿真。
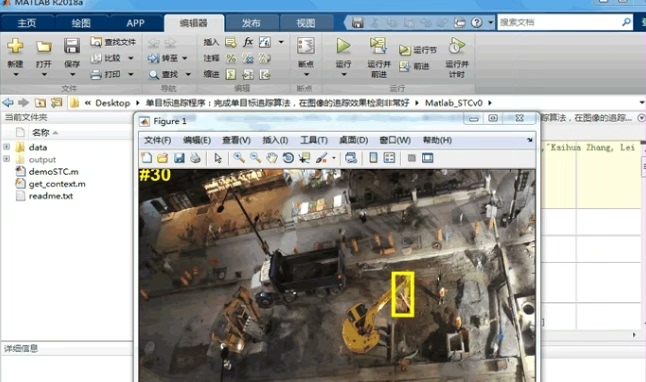
OpenCV里自带了好几种现成的追踪器,比如KCF、CSRT、MOSSE这些,各有各的优缺点:KCF快但抗遮挡差,CSRT慢一丢丢但稳得一批,我们最后用的就是CSRT,毕竟追猫这种爱钻缝的主儿,稳比快重要。这个函数绝了,不用自己手动写坐标,直接拖鼠标拉框就行,选完按回车就确认,当时我们框的就是那橘猫的脑袋,别框太宽啊,框太宽把背景带进去,追踪器容易被别的东西干扰。反正这个代码真的足够应付大多数日常
负样本就是不带行人的背景图,比如街道、草地、车流啥的,数量最好比正样本多一点,我当时是1:3的比例,大概2000张正样本配6000张负样本,负样本找的时候一定要仔细,别把行人混进去,不然训练出来的模型会瞎识别。这个代码其实挺直白的,就是遍历文件夹里的所有图片,统一缩成要求的尺寸,负样本的预处理也是一样的逻辑,只是不用抠图,直接用原图缩就行,毕竟负样本只要尺寸对就行。我当时第一次训练的时候就是改了b