




- @dengn191020
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
ubuntu安装CH341串口驱动、ch341驱动安装失败、ttyUSB*被挂载为ttyCH341USB*、安装串口调试工具cutecom:(也可以安装COMTool)、基于python的串口通信测试代码(linux)、如果出现插入usb转ttl模块,而未出现ttyUSB串口名称的问题,或者是插入usb转ttl模块,cutecom检测不到ttyUSB串口、sudo make load失败进行驱动

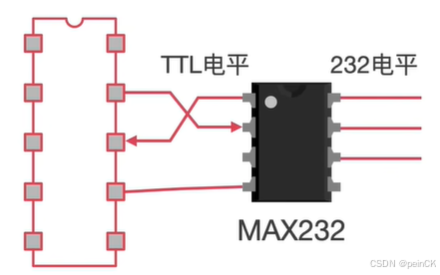
无论是RS232、RS422、RS485他们只定义了物理层,规定了电平标准。只需要会简单的串口通信就很容易的进行RS232、RS422、RS485通信。如图所示RS232和RS485与串口,传输逻辑 “0”,“1”,时的电平变化如下图所示。特性RS-232RS-422RS-485信号传输方式单端信号(与地相对)差分信号差分信号最大通信距离15米(50英尺)1200米(4000英尺)1200米(40
舵机接线,舵机驱动(90度、180度、270度、360度),STM32定时器PWM输出配置要点,

PCA9685接线、PCA9685简介、PCA9685地址位寄存器、MODE1寄存器,地址0x00,可读、可写、寄存器地址、PCA9685代码注解、PCA9685数据写入、PCA9685数据读取、PCA9685的频率设置、PCA9685的PWM设置、舵机转动角度置换、PCA9685驱动代码:
ubuntu安装CH341串口驱动、ch341驱动安装失败、ttyUSB*被挂载为ttyCH341USB*、安装串口调试工具cutecom:(也可以安装COMTool)、基于python的串口通信测试代码(linux)、如果出现插入usb转ttl模块,而未出现ttyUSB串口名称的问题,或者是插入usb转ttl模块,cutecom检测不到ttyUSB串口、sudo make load失败进行驱动

舵机接线,舵机驱动(90度、180度、270度、360度),STM32定时器PWM输出配置要点,

PCA9685接线、PCA9685简介、PCA9685地址位寄存器、MODE1寄存器,地址0x00,可读、可写、寄存器地址、PCA9685代码注解、PCA9685数据写入、PCA9685数据读取、PCA9685的频率设置、PCA9685的PWM设置、舵机转动角度置换、PCA9685驱动代码: