




- @chase_my_dream
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文解读LIO-SAM的mapOptimization.cpp,实现核心后端建图功能:1)scan-to-map匹配优化位姿;2)关键帧管理;3)GTSAM因子图全局优化;4)融合GPS与回环。流程:接收点云→IMU/odom初值→局部地图→LM优化位姿→iSAM2更新因子图→发布结果。通过多传感器融合与分层优化,实现高精度LiDAR定位建图。
C++与SLAM开发核心:用`const&`避免拷贝,RAII与智能指针管理内存;`weak_ptr`破循环引用。多线程用互斥锁防数据竞争。移动语义优化性能,按场景选容器。模块化接口设计,浮点比较设阈值,合理选用四元数/李代数。Valgrind查泄漏,日志分级控频。
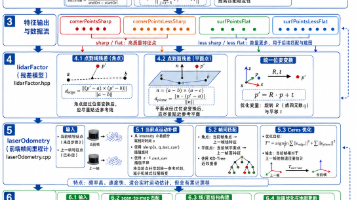
A-LOAM采用五层架构实现激光SLAM:**数据输入层**转换雷达数据为ROS点云;**特征提取层**按曲率分区提取角点与平面点,复用intensity字段存储时间与线束ID;**优化模型层**定义点到线/点到面残差;**前端里程计**通过scan-to-scan匹配和运动补偿输出高频位姿;**后端优化**基于scan-to-map匹配和局部地图抑制累积误差。分层解耦兼顾了实时性与精度。
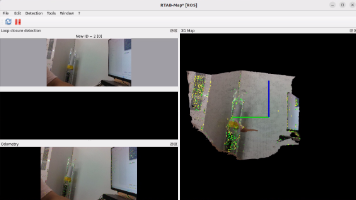
本文介绍了在Jetson Orin Nano上通过Docker配置ROS2 Humble及视觉SLAM环境的完整流程。具体包括:构建集成ROS2、OpenCV和SLAM依赖的镜像;安装RealSense驱动与ROS接口;编译并配置RTAB-Map进行3D建图。文中详细提供了Dockerfile和关键命令,并说明了深度图像话题的选择对建图效果的影响,便于环境部署与迁移。
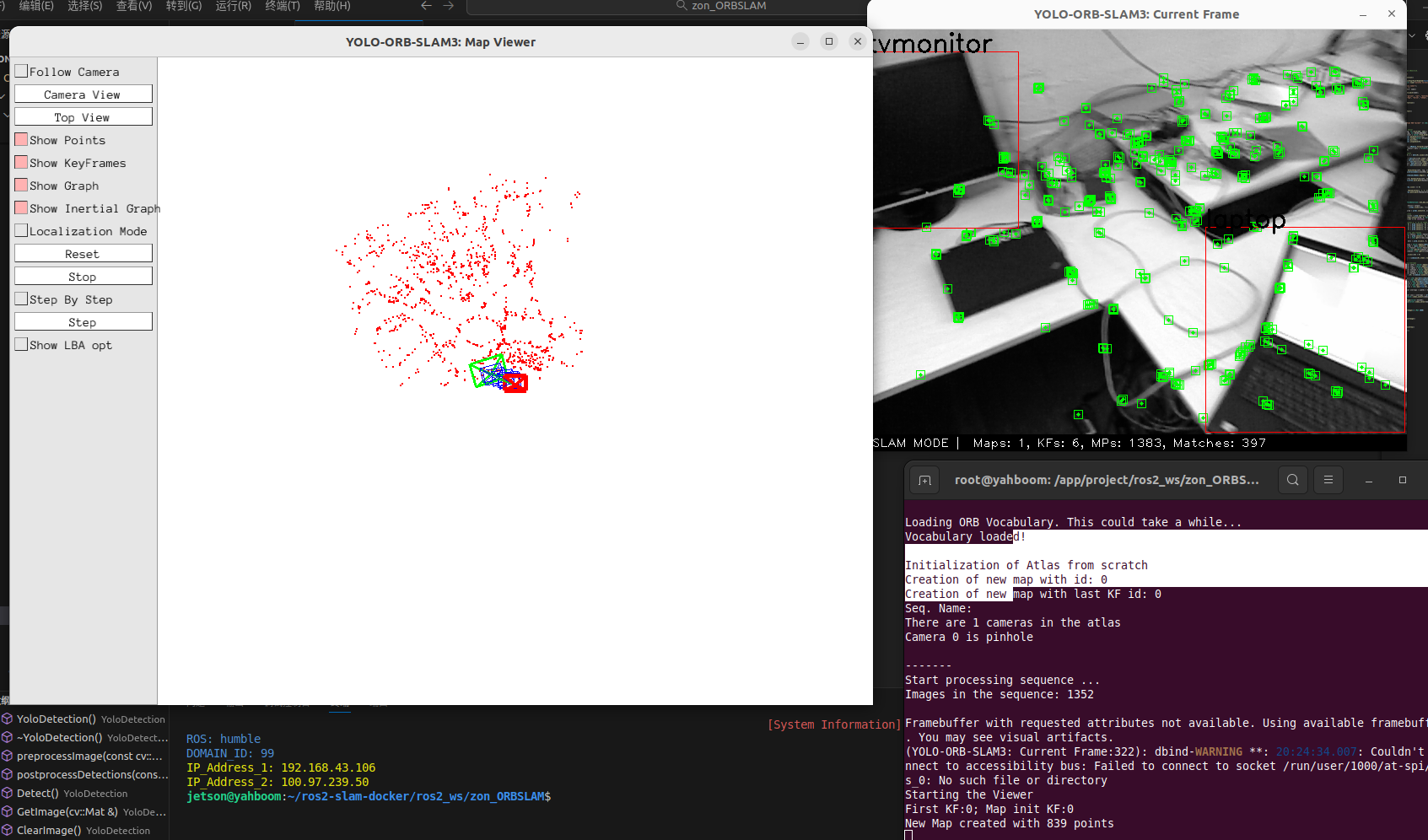
基于ubuntu20.04搭建YOLO_ORB_SLAM3环境
本文介绍了在Jetson Orin Nano上通过Docker配置ROS2 Humble及视觉SLAM环境的完整流程。具体包括:构建集成ROS2、OpenCV和SLAM依赖的镜像;安装RealSense驱动与ROS接口;编译并配置RTAB-Map进行3D建图。文中详细提供了Dockerfile和关键命令,并说明了深度图像话题的选择对建图效果的影响,便于环境部署与迁移。