- @callmeup
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了一种基于自适应渐消扩展卡尔曼滤波(AFEKF)的三维雷达机动目标跟踪算法。该算法针对目标机动时模型失配问题,通过设计自适应渐消因子调整预测协方差,提高跟踪精度。仿真实验表明,AFEKF相比标准EKF在位置和速度估计误差上均有明显改善,尤其能有效应对目标加速度突变情况。程序提供了三维轨迹、位置误差、速度估计等可视化结果,并输出量化性能指标。该算法适用于复杂机动目标的雷达跟踪场景,可进一步扩
对比经典扩展卡尔曼滤波(EKF)与自适应扩展卡尔曼滤波(AEKF)的MATLAB仿真程序。该程序针对三维非线性离散系统,通过构造真实状态、含噪声状态和观测数据,分析两种滤波方法的性能差异。系统模型包含非线性状态转移和观测方程,并人为设置了观测噪声突变场景来测试滤波器的鲁棒性。自适应EKF通过动态调整观测噪声协方差矩阵R来应对异常观测
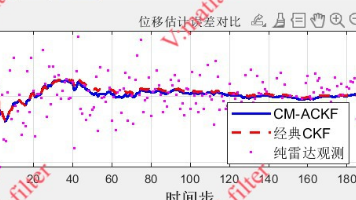
本文介绍了一种基于自适应容积卡尔曼滤波(CM-ACKF)的二维雷达目标跟踪方法。针对非线性系统中的状态估计问题,通过MATLAB仿真对比了经典CKF与自适应CKF在噪声参数不准确时的性能差异。文章详细阐述了目标匀速运动模型和雷达测距测角观测模型的设计原理,重点解析了CKF的容积点采样策略和预测更新过程。创新性地引入基于新息协方差的在线噪声参数调整机制,使滤波器能够自动修正过程噪声Q和观测噪声R,逐
基于MATLAB的自适应窗口滑动滤波图像处理方法,通过对比传统固定窗口滤波与自适应滤波在不同噪声环境下的处理效果。实验采用椒盐噪声和高斯噪声测试,结果显示自适应滤波能根据局部特征动态调整窗口大小:在强噪声区域增大窗口增强抑噪能力,在边缘区域减小窗口保留细节。程序提供可视化结果(滤波效果图、窗口分布图、误差热力图)和定量指标(PSNR、SSIM、MSE),表明自适应方法在噪声去除与细节保留方面优于传
本课题围绕三维空间中的目标定位与轨迹跟踪展开研究,采用基于到达时间(TOA, Time of Arrival)的测距定位方法,并结合扩展卡尔曼滤波(EKF)对目标运动轨迹进行估计与优化。针对实际应用中定位结果易受测量噪声、时钟误差以及环境扰动影响的问题,本文构建了一个包含多个三维锚节点的定位模型,通过对目标与各锚节点之间的传播时间进行测量,完成目标位置的初始估计,并进一步利用 EKF 对连续时刻的
符号含义本例取值xkx_kxkkkk时刻系统状态(位置)AAA状态转移矩阵111(匀速模型)HHH观测矩阵111(直接观测)QQQ过程噪声协方差111RRR观测噪声协方差444(噪声较大)
基于交互式多模型(IMM)算法的目标跟踪方法。该方法通过融合匀速直线、左转弯和右转弯三种运动模型,实现对机动目标的精确跟踪。文章详细阐述了IMM算法的核心思想、状态模型与观测模型构建、算法流程(包括模型交互、条件滤波、概率更新和状态融合)以及MATLAB实现方案。仿真结果表明,IMM算法能够根据目标运动模式自动调整模型概率,在直线运动和转弯阶段均保持较好的跟踪性能。该方法可扩展应用于无人机、车辆等
在非线性系统状态估计问题中,系统状态方程和观测方程往往并不满足严格的线性关系。传统卡尔曼滤波虽然具有计算效率高、结构清晰等优点,但其基本形式主要适用于线性高斯系统。当系统模型存在明显非线性、观测噪声发生变化或系统状态出现突变时,普通滤波方法容易出现估计误差增大、跟踪能力下降甚至滤波发散等问题。无迹卡尔曼滤波(Unscented Kalman Filter, UKF)是一类常用的非线性滤波方法。
本文程序构建了一个多无人机编队协同控制与三维轨迹规划仿真模型,用于验证领航—跟随式编队控制、三维航路点跟踪、障碍物规避以及无人机间安全距离保持等功能。仿真场景中共设置555架无人机,其中 UAV-1 作为领航无人机,其余无人机作为跟随无人机。领航无人机按照给定三维航路点序列完成轨迹跟踪任务,跟随无人机则依据相对于领航机的期望空间偏移量形成楔形/箭头形编队。程序同时引入球形障碍物模型和人工势场思想,
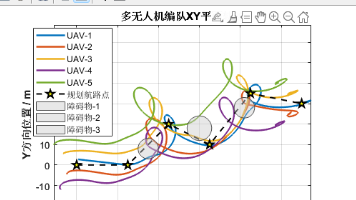
本课题研究动态环境、多无人机系统的协同路径规划与避碰防撞问题,是当前无人机集群控制领域的核心挑战之一。随着无人机技术的迅速发展,多无人机协同执行任务(如搜救、测绘、物流配送、军事侦察等)的需求日益增长。然而,在动态、复杂的三维空间中,如何使多架无人机高效协同、实时规避障碍与相互碰撞,是亟待解决的关键问题。多无人机系统建模:建立无人机运动学与动力学模型,描述其在三维空间中的飞行特性;动态环境感知:对