- @aycd1234
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
宝石作为一种珍贵的矿物资源,具有很高的经济价值和艺术价值。传统的宝石类型识别方法主要依靠人工经验和专业设备,存在效率低、成本高、主观性强等问题。随着深度学习技术的发展,基于深度学习网络的宝石类型识别算法逐渐成为研究热点。GoogLeNet 是一种深度卷积神经网络,在图像分类等任务中取得了显著的效果。

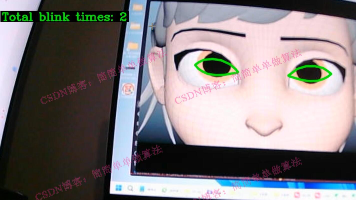
MediaPipe是一个跨平台的机器学习框架,用于处理和分析视频流中的图像数据。它提供了一系列的预训练模型和工具,能够检测和跟踪人体的各种特征,包括面部特征点。眨眼检测原理:眼睛的状态变化(睁开或闭合)会导致眼睛周围的面部特征点的位置和几何关系发生变化。通过 MediaPipe 检测出眼睛区域的关键特征点,分析这些特征点的坐标信息及其动态变化,来判断眼睛是否处于眨眼状态。例如,计算眼睛纵横比(Ey
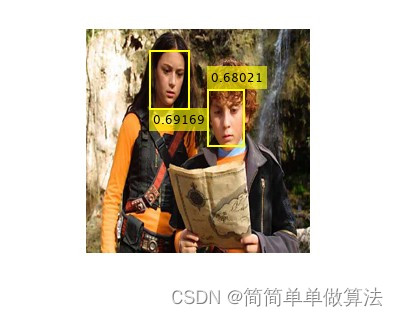
YOLOv2是由Joseph Redmon等人在2016年提出的实时目标检测算法,其核心理念是在单个神经网络中一次性完成对整幅图像的预测。对于人脸检测任务,YOLOv2通过端到端的学习,能够在整个图像上直接预测出人脸的位置和大小。
随着计算机视觉和人工智能技术的快速发展,基于人脸图像的年龄估计成为了研究热点之一。通过深度学习和人脸图像分析技术,我们可以有效地从人脸图像中提取出年龄相关的特征,进而实现年龄段估计。

脉冲神经网络(Spiking Neural Network,SNN)是第三代人工神经网络,它更接近生物神经元的工作方式。其中,Izhikevich - Memristive(IM)神经元模型是一种结合了忆阻器(Memristor)特性和 Izhikevich 神经元动力学的模型,在神经形态计算和复杂神经动力学模拟等领域具有重要的应用价值。Izhikevich 神经元模型的基本方程为:其中v是神经元

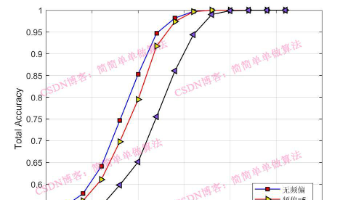
本文介绍了一种基于卷积神经网络(CNN)的QPSK调制信号检测与识别算法。文章首先展示了算法运行效果图,并提供了Matlab 2024b版本的运行环境。核心程序部分详细描述了算法的实现过程,包括数据分类、误检率与漏检率的计算,以及准确率的评估。算法理论部分阐述了QPSK调制原理及其在频偏情况下的信号处理问题,并介绍了CNN在信号处理中的应用。最后,文章提供了完整的程序工程,包括训练集和验证集的划分
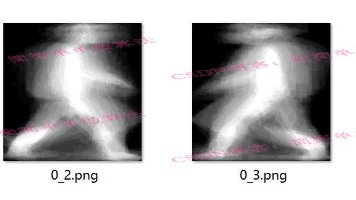
步态识别作为生物特征识别领域的重要研究方向,具有非接触、远距离识别等优势,在智能安防、身份验证等诸多领域展现出巨大的应用潜力。CASI库是步态识别研究中常用的大型数据库,为算法的训练和评估提供了丰富的数据资源。GoogleNet深度学习网络凭借其独特的 Inception 模块和高效的网络结构,在图像分类等任务中取得了优异的成绩。GEI(Gait Energy Image)步态能量图则是一种能够有
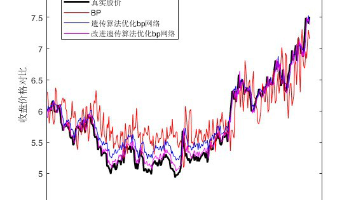
摘要:本文提出一种基于遗传算法优化的BP神经网络模型,用于一维时间序列预测。针对传统BP神经网络易陷入局部最优、收敛速度慢等问题,采用改进遗传算法优化网络初始权值和阈值。通过编码、适应度函数、选择交叉变异等遗传操作,结合BP神经网络训练过程,实现对金融时间序列的高精度预测。实验结果表明,该混合模型能有效提升预测准确性,平均误差、平方差和均方差等指标均优于传统方法。算法在MATLAB 2022a环境
其中【pytorch】是环境的名字,【python=3.7】是使用的 Python 版本 执行后会列出该环境要安装的包,输入 y 执行即可。如果是windows操作系统,则直接安装步骤一里面的软件版本就可以了,如果是其他操作系统,则进入Anaconda官网下载相应版本。【完成】 这时候应该能在【开始】找到【Anaconda3(64-bit)】,至此 Anacanda3 安装完成。Pycharm是一

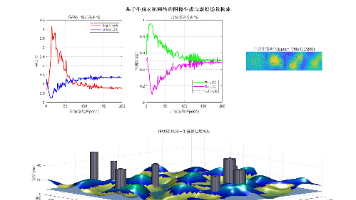
摘要:本文提出了一种基于生成对抗网络(GAN)的三维虚拟场景构建方法。通过构建生成器与判别器的对抗博弈,算法能够学习真实地形的统计特征并生成高质量虚拟环境。研究采用MATLAB 2024b实现,核心程序包括地形生成、建筑物添加和场景漫游动画等功能。理论部分详细阐述了GAN的目标函数、网络前向传播过程及损失函数计算方法。实验结果表明,该方法能有效生成分辨率可调的三维虚拟地形场景,适用于游戏开发、仿真