




- @ak47maker
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
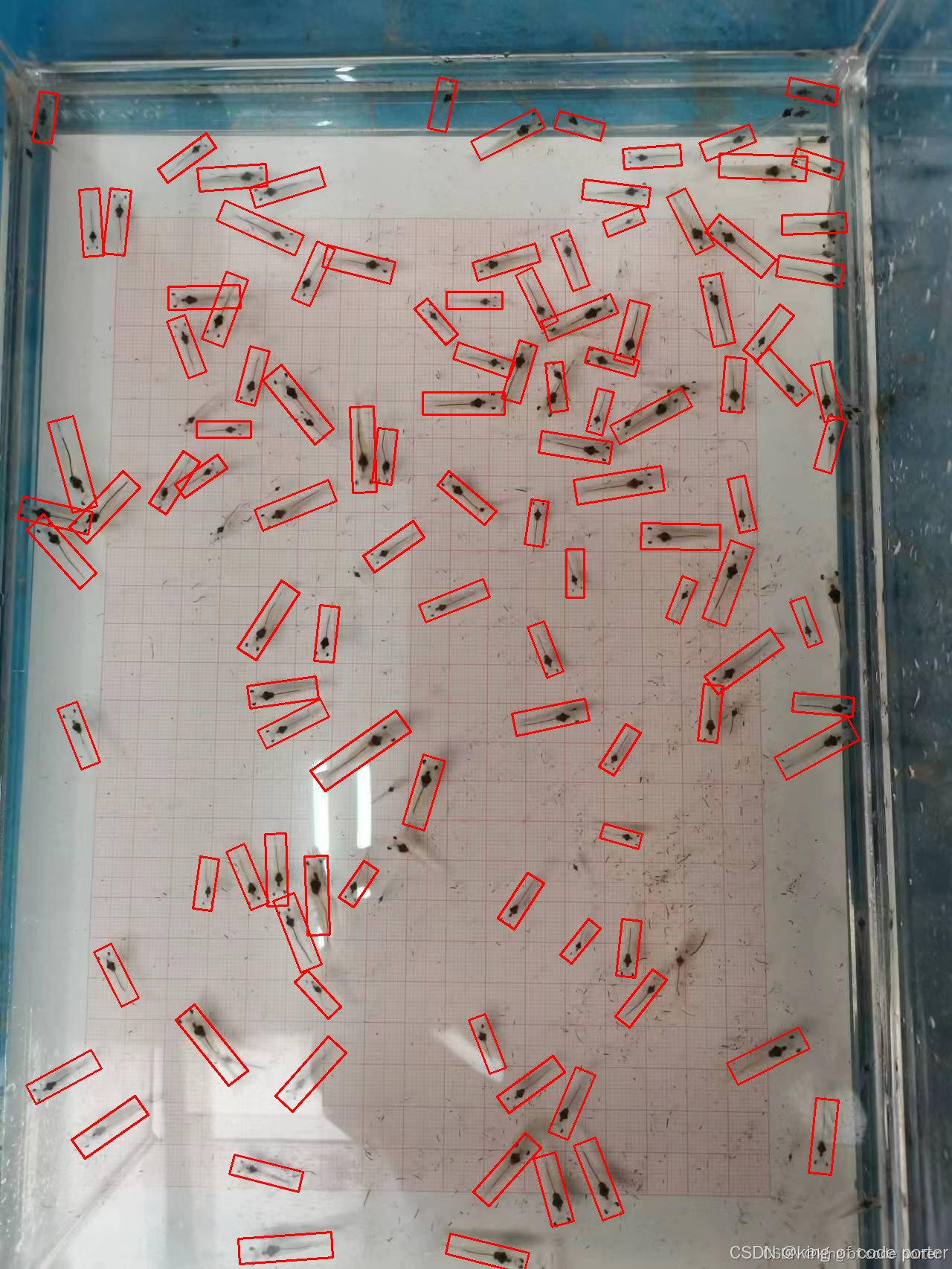
YoloV5-OBB通过引入旋转框检测能力,显著提升了模型在倾斜目标场景下的检测性能。其核心改进包括旋转框表示、角度编码策略和旋转IoU计算等。虽然带来了一定的计算开销,但在需要精确检测旋转目标的场景下,这种改进是非常有价值的。未来,随着硬件加速和算法优化的进步,旋转目标检测技术将在更多领域得到广泛应用。
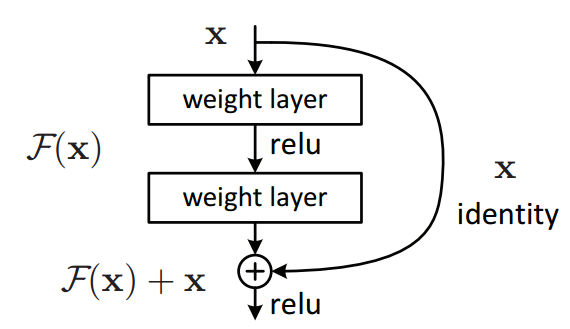
在深度学习的发展历程中,卷积神经网络的设计深度是一个需要精心权衡的关键参数,网络的深度在本质上起到的主要作用有以下两个大方面。解决了梯度消失问题缓解了网络退化现象实现了特征复用机制大幅提升了网络深度上限这种"大道至简"的设计思想也影响了后续Transformer等架构的发展,成为深度学习发展史上的里程碑式创新。
深度学习模型压缩技术是实现大模型轻量化部署的关键,主要包括模型剪枝、量化和知识蒸馏三种方法。模型剪枝通过移除不重要权重或通道来减小模型体积;量化将高精度参数转为低精度格式(如FP32到INT8)以提升速度;知识蒸馏则让小模型模仿大模型的行为来保持性能。这三种技术可单独使用或组合应用,例如先剪枝再量化,或蒸馏后结合量化。实践表明,通过协同优化能实现模型体积缩小4倍、推理速度提升2倍以上,同时精度损失
本文分析了YOLO系列目标检测框架从v5到v11的核心技术演进,重点对比了架构设计和损失函数两方面的优化。架构上,YOLOv11通过C3K2模块、C2PSA注意力机制和深度可分离卷积,实现了动态特征融合与轻量化设计;损失函数方面,引入NWD Loss和DFL+Focal Loss组合,增强了对小目标和密集场景的处理能力。这些改进使YOLOv11在计算效率、检测精度和场景适应性上均有显著提升,推动了
蚂蚁百宝箱企业版是面向企业的智能应用开发平台,提供零代码/低代码开发工具,助力企业快速构建专属智能体。平台集成智能体构建、多角色协作、行业模板、插件生态等核心功能,支持MCP协议开发与多渠道发布。依托支付宝生态资源,企业可复用成熟业务框架,实现"一次构建,多端分发",显著降低开发成本。该平台特别适合文旅、出行等行业,通过预置模板和自动化评测工具,加速企业智能化转型落地。
MCP(模型上下文协议)是一种标准化协议,用于连接大语言模型与外部工具,实现模型与工具间的智能协作。它通过标准化接口扩展模型能力,支持实时信息获取和专业工具调用,突破传统大语言模型的知识边界。MCP提供自动上下文管理、参数验证和错误处理机制,相比传统API调用更具扩展性和智能化。常用框架包括FastMCP、LangChain等,适用于不同规模和需求的项目。MCP通过工具注册、服务启动、智能调用等流
本文详细介绍了如何在蚂蚁百宝箱企业版平台注册MCP插件。首先需要将开发好的MCP服务部署在阿里云服务器上,确保服务正常运行。然后在百宝箱平台新建插件,填写MCP名称、功能描述和服务地址。重点展示了接口调试过程,包括输入参数、运行测试和验证结果,直至所有接口状态变为"调试通过"。最后指出MCP注册的关键在于代码调试能力,强调编程基础对智能体开发的重要性。通过完整流程演示,帮助开发
本文介绍了如何在蚂蚁百宝箱企业版平台上发布已开发完成的智能体应用。作者首先回顾了前期系列文章,详细记录了从概念认知到实际搭建智能调价助手应用的完整过程。文章重点展示了应用调试完成后,通过简单操作即可发布到不同平台的步骤,包括选择发布渠道、确认协议以及获取使用链接等。同时指出该案例虽然完成了基本功能演示,但在头像、描述、提示词优化等方面仍有改进空间,特别是需要结合具体业务系统完善数据输入功能。最后总
本文介绍了如何在百宝箱企业版平台上调用MCP插件实现民宿智能调价功能。首先回顾了前期完成的意图识别和参数提取工作,详细说明了MCP插件所需参数的准备过程,包括必填参数处理、默认值设置和用户引导。重点展示了通过代码节点进行参数格式转换的步骤,包括竞争对手价格、市场数据、设施等参数的标准化处理。最后演示了在百宝箱平台添加并配置MCP插件的具体操作流程,强调了参数格式兼容性的重要性。整个流程体现了智能体
本文针对ResNet18模型提出了一种全局残差块剪枝方法,重点裁剪了layer1至layer4中的所有残差块,同时保留第一层卷积conv1以维护基础特征提取能力。文章详细阐述了剪枝策略设计原理与代码实现,通过L1范数对残差块内的卷积层进行通道剪枝,并同步调整批归一化层参数。实验结果显示,该方法在保证模型精度的同时显著减少了参数量,为深度学习模型压缩提供了有效的实践方案。(150字)