- @absll
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
我们在做GNSS数据处理和分析的时候,难免会用到很多天甚至几年的GNSS数据,如果一个一个下载的话未免过于麻烦,因此博主利用Python写了一个较为简单的下载数据的程序,简单调试一下就能实现自动下载啦。
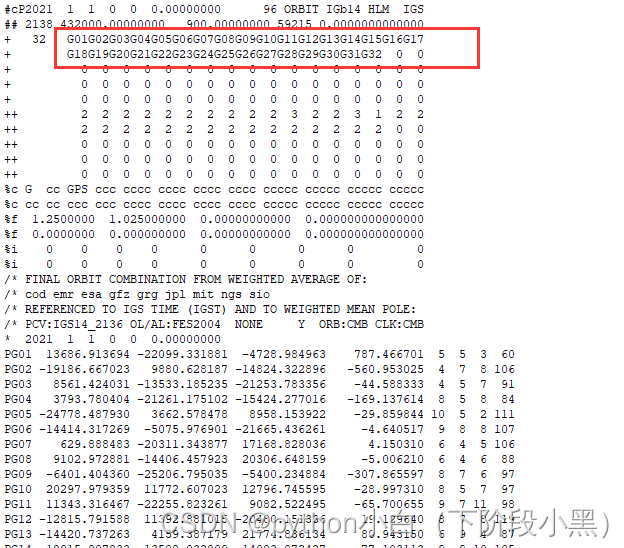
RTKLIB专题学习(十三)—关于RTKLIB不能有效解算北斗数据的探索(一)文章目录系统使用发现问题精密星历读取信号类型选取系统使用发现问题从上图的调试结果可以看到,当处理北斗数据时(sat=106是对应的北斗),其计算的接收机到卫星的距离为-1;也就是计算出错,原因是,在geodist函数中,当卫星距离地心的距离小于地球半长轴时,返回值-1。/* geometric distance ----
今天开始,更新自适应导航定位系列博客,该系列博客参考书籍为杨元喜老师的《自适应动态导航定位》导航计算方法概述动态导航一般采用序贯算法或递推算法,如动态参数平差方法和滤波方法等。动态导航所涉及的信号一般分为两类,即随机信号和非随机信号。若采用平差方法进行导航计算,则可以将所有随机信号(包括观测的、模型推算的,以及统计已知的)均作为观测量,从而采用平差方法求得动态载体的导航解。这类平差方法包括参数加权
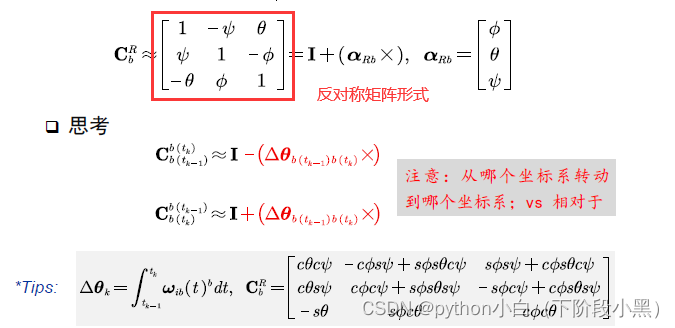
文章目录方向余弦矩阵欧拉角为小角度时的DCM方向余弦矩阵的微分方程求解微分方程方向余弦矩阵方向余弦矩阵的每一个元素都是方向余弦欧拉角为小角度时的DCM当三个欧拉角均为小角度时(小角度近似),对应的方向余弦矩阵可简化为:由上图可知,当欧拉角都非常小的时候,其实欧拉角所表达的姿态,就有点接近向量的属性了方向余弦矩阵的微分方程上述推导可以得出,一个方向余弦矩阵的微分等于这个方向余弦矩阵自身乘以b系相对于
对于惯性理论来说,实际上是从牛顿力学定律出现就已经建立起基础了。文献[3]中就详细介绍了捷联惯导的更新算法、误差特性分析、初始对准以及卡尔曼滤波等相关技术,是较为全面的参考书籍。惯导技术其实是和惯导器件发展有直接联系的,我国惯性器件的研究起步时间和国外相当。我国的惯导先驱有很多,如林士鄂先生、陆元九先生、高伯龙先生等。林士鄂先生于1958年,创立北航陀螺研究室,研制国内第一个液浮陀螺和动力调谐陀螺
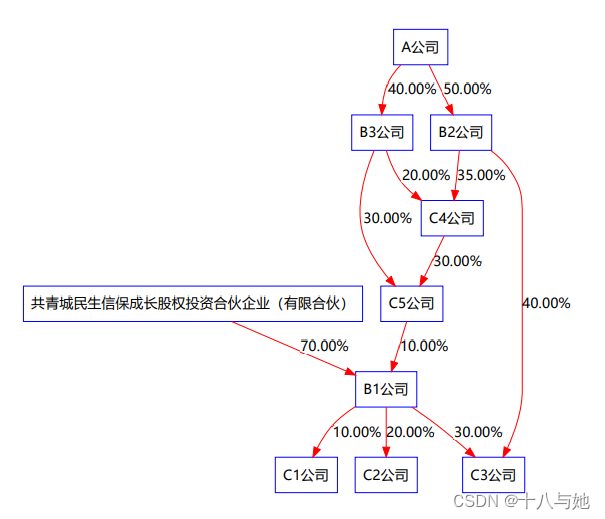
有的时候我们需要对公司的股权结构图进行透视,如果手动绘制的画有些太麻烦,当然手动绘制的一定很好看,但是如果只是需要一个示意图的话,利用Python实现就可以了。
目前的IGS(International GNSS Service,国际GNSS服务组织)分析中心,共12个(最近的更新时间在2021年4月16日,Last Updated on 16 Apr 2021 15:49 PM GMT+0000)WHU(Wuhan University):武汉大学,缩写WHU--------中国CODE(Center for Orbit Determination in
RTKLIB专题学习(十)—电离层改正今天我们一起来学习下,RTKLIB中对电离层延迟改正的方法,并了解源码的相应模块,以便对原理有一定的了解1.电离层延迟改正模型由于存在大量的自由电子和正负离子,当卫星信号穿过电离层时,如同其他电磁波一样,信号的路径会发生弯曲,传播速度也会发生变化,从而使得测量所得到的距离不等于卫星至接收机的几何距离,这种偏差称为电离层折射误差。RTKLIB中源码如下:/* i
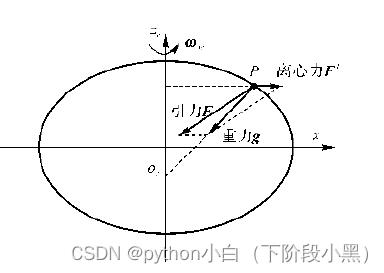
文章目录地球的正常重力场定义图解圆球假设下的地球重力旋转椭球假设下的地球重力历史上重要的正常重力模型重力与高度的关系实用公式PSINS中相关代码地球重力场的球谐函数模型地球的正常重力场定义在地球的大地水准体描述中,水准体表面是地球实际重力场的一个等位面,每一点的重力方向均与该点所在等位面相垂直,实际的重力方向一般称为天文垂线,或称真垂线。由于实际地球内部密度分布不均匀,并且表面凹凸不平,大地水准面
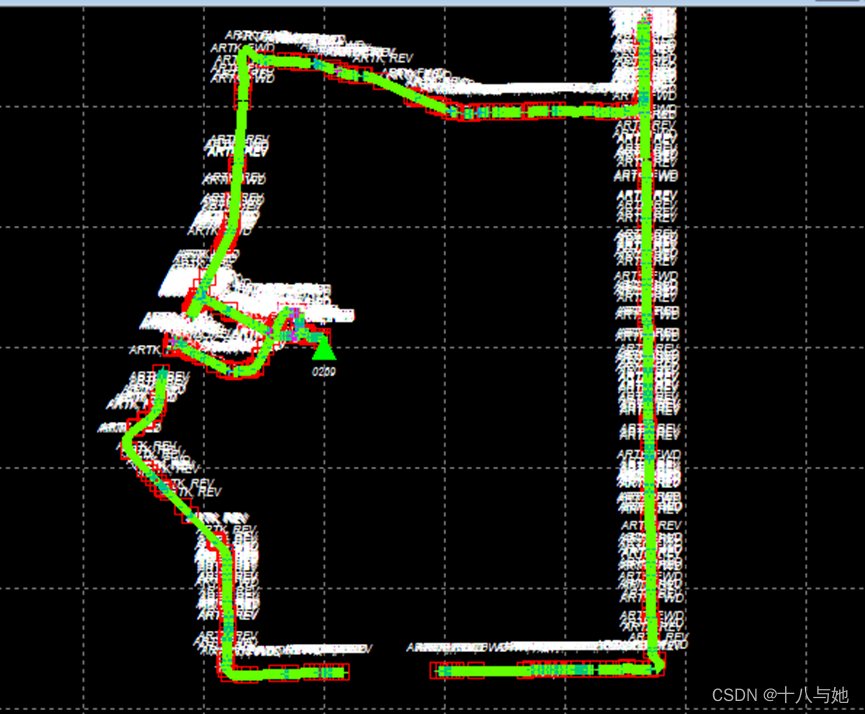
解算质量为1的数量占总数量的80.5%,质量为2的占17.3%,所有轨迹点均成功解算。位置标准差分布情况为,10cm以下的数据点占比97.7%,10-30cm的数据点占比0.9%,不存在误差超过5m的数据点。