




- @ZLG_zhiyuan
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
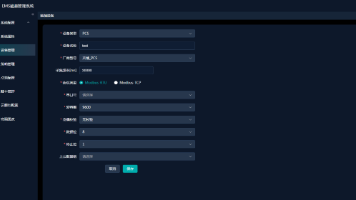
该系列产品集成丰富的外设接口,支持各类BMS、PCS、空调、电表、屏显等设备的通讯传输,且软件上支持RT-Linux、Ubuntu等操作系统,支持IEC-61850/IEC-104/EtherCAT等专用协议,可广泛满足各类储能系统的本地能源管理应用需求。储能柜项目,初期要接入集成设备(PCS、BMS、电表等)进行调试,设备调试过程比较繁琐又容易出错,怎样才能快速验证储能柜内设备添加、调试的正确性
HarmonyOS NEXT是华为公司自研操作系统,2023年8月4日发布,该系统是鸿蒙抛弃Linux内核及安卓开放源代码项目(AOSP)等代码的首个大版本,该系统仅支持鸿蒙内核和鸿蒙系统的应用,不再兼容安卓应用。HarmonyOS是全球第三大移动操作系统,有巨大的市场潜力,在国产替代的背景下,机会多多,AWTK支持HarmonyOS,让AWTK开发者也能享受HarmonyOS生态的红利。代码下载

因此,在排查此类问题时,务必检查接收端的设置,确保其处于正常工作模式,能够正确回应 ACK 信号。有些客户反映,即使只有一个 CAN 口在发送数据,且总线都未连接,仍然会出现发送失败的情况。在实际工作中,只要严格按照这四个要点进行检查和配置,就能大大提高 CAN 通讯的成功率,避免因通讯故障而影响工作进度。还有一种常见的情况是,两个 CAN 设备都已正确对接,且波特率设置一致,但仍然无法正常发送数
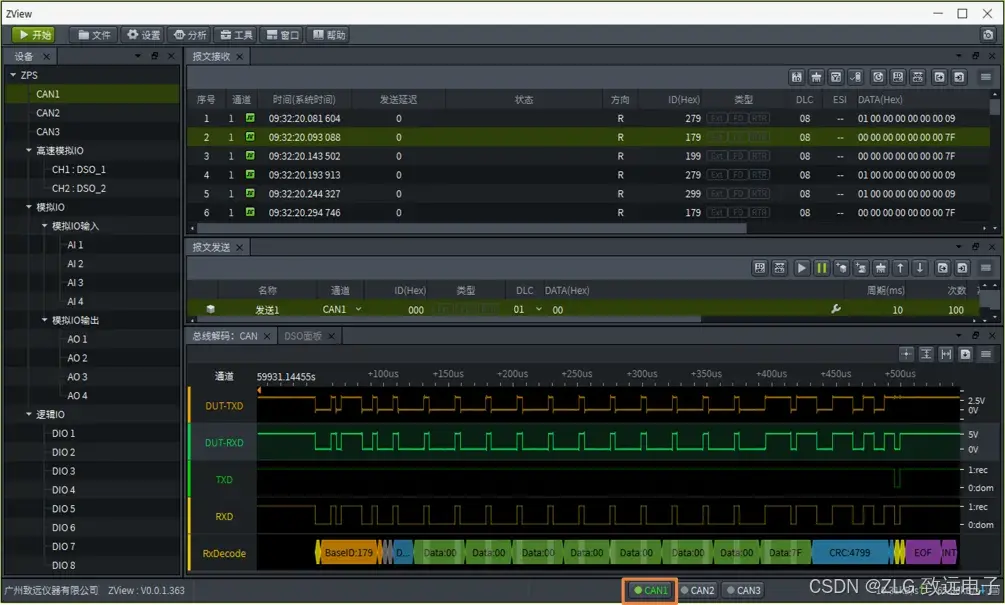
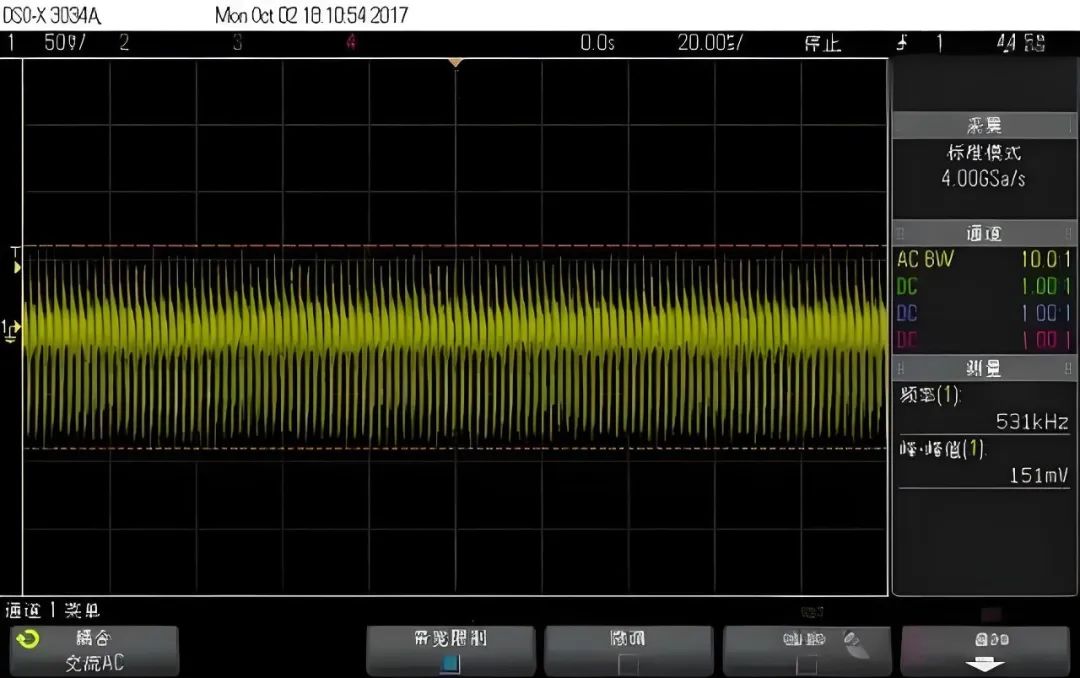
在CAN总线系统的设计中,物理层的延迟主要来源于收发器,它影响到系统的性能以及系统响应能力,过大的延迟会导致系统无法应用较高的波特率、总线位错误频发、通信时序异常等,通过在线测量和评估CAN收发器的延迟时间,能在设计初期验证系统的延迟参数是否满足预期,也能用于验证产品是否合符标准要求,确保设备物理层特性的一致性。例如对DUT的收发器进行时序特性测量时,需要将收发器选择为“外部收发器”,同时TX、R
Cortex®-R5F内核则是用来单独处理EtherCAT通讯,当有数据通讯时会第一时间对接收的数据进行处理,而无需处理其他的线程任务,降低了数据的延时和抖动,可实现毫秒周期任务抖动±5μs以内,为延迟特性提供特别出色的实时性能。让我们来一起看看它强大的内核结构。采用的是多核异构的处理器,处理器内部包含2个主频1GHz的64位Arm® Cortex®-A53内核,4个主频800MHz的Cortex

遇到过不少案例,在电源设计上做了物料成本节省,在电源最大功率、电源质量等方面打了折扣,带来了极大的隐患。电源系统为系统或产品工作提供能源,电源质量的好坏直接影响着产品的稳定性,稳定可靠的电源是产品和系统稳定运行的基础,如果电源不稳定,系统的可靠性就无从谈起,千万不要在电源上抠成本。例如,如果一个电源额定功率是500W,峰值功率是600W,配套给正常工作就需要600W功率的产品供电,有可能导致产品供
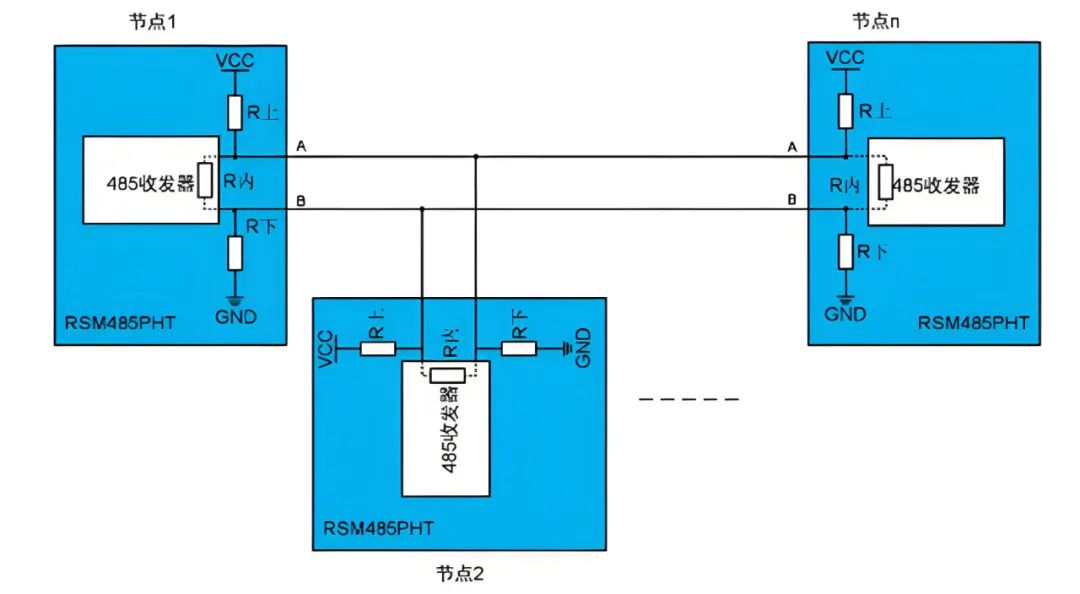
RS485总线的偏置电阻主要是给A、B确定的逻辑状态。RS485总线的终端电阻主要是用于信号线的阻抗匹配、提供通信线缆寄生电容能量的泄放路径、提高信号质量。此次以自收发产品RSM485PHT为例进行说明,该产品内置完整的DC-DC和信号隔离电路,具有较强的抗扰性和高可靠性,具备自动收发功能。该产品的A、B线内置47kΩ的上、下拉电阻,收发器输入阻抗最小值为48kΩ。本次测试的硬件框图如图1所示,在
要解决CAN总线的采样点设置不正确可能导致的数据丢失问题,需要对CAN控制器的配置进行仔细评估和调整。如果终端匹配电阻的阻值不正确,可能会导致信号在总线上的反射,造成信号干扰和失真。对于CAN总线的采样点设置,需要考虑到总线的通信速率、时钟源的稳定性以及传输线的信号衰减等因素。此外,在高速传输或长距离传输的情况下,信号的衰减可能会导致采样点的漂移,进一步影响数据的准确采样。此外,对于缓冲区的管理和

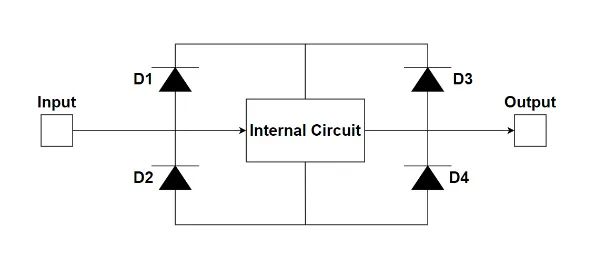
在一个具有上电顺序的情况下(或右侧器件断电或者拔插动作),左侧的电压如果足够大,那么就会通过二极管向右侧的VDD充电,也就是去耦电容的充电,这样就会使二极管急速过载损坏,电容本身也有可能损坏,瞬时的大电流甚至会直接击毁元件本身,再好的结构也会使得器件逻辑工作不正常。若PMU某一DC-DC既给SOC供电又给一些外设供电,而且SOC的GPIO有不少使用了该DC-DC的电源域,外设的供电电源也可能通过G
它基于以太网IP协议栈,将ECU间的“点对点拉线”升级为“云端化服务”,让域控制器像互联网应用一样按需调用服务。这种“按需取用”机制,使车载网络带宽利用率提升60%以上,更支持跨域融合——智能座舱可直接调用ADAS的“变道安全评估服务”,让语音助手秒变“老司机”。ZXDoc支持SOME/IP功能,通过服务导向架构实现跨域通信标准化,降低系统耦合,支持动态服务发现与调用,提升分布式系统扩展性和维护效
