- @Time_Memory_cici
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
人机交互(Human-Computer Interaction, HCI)和人机协作(Human-Robot Collaboration, HRC)是当前科技领域的研究热点,具有广阔的学术价值和应用前景。知道哪些期刊发表相关论文, 有助于我们学习最近技术,所以这里列出包含此方向的期刊。题目:A Learning-Based Adjustable Autonomy Framework for Hum

我所使用的kinova mico机械臂,配置完成moveit功能包后,运行roslaunch m1n6s300_moveit_config demo.launch报错:及raise TypeError, "cannot marshal None unless allow_none is enabled" TypeError: cannot marshal None unless allow_non
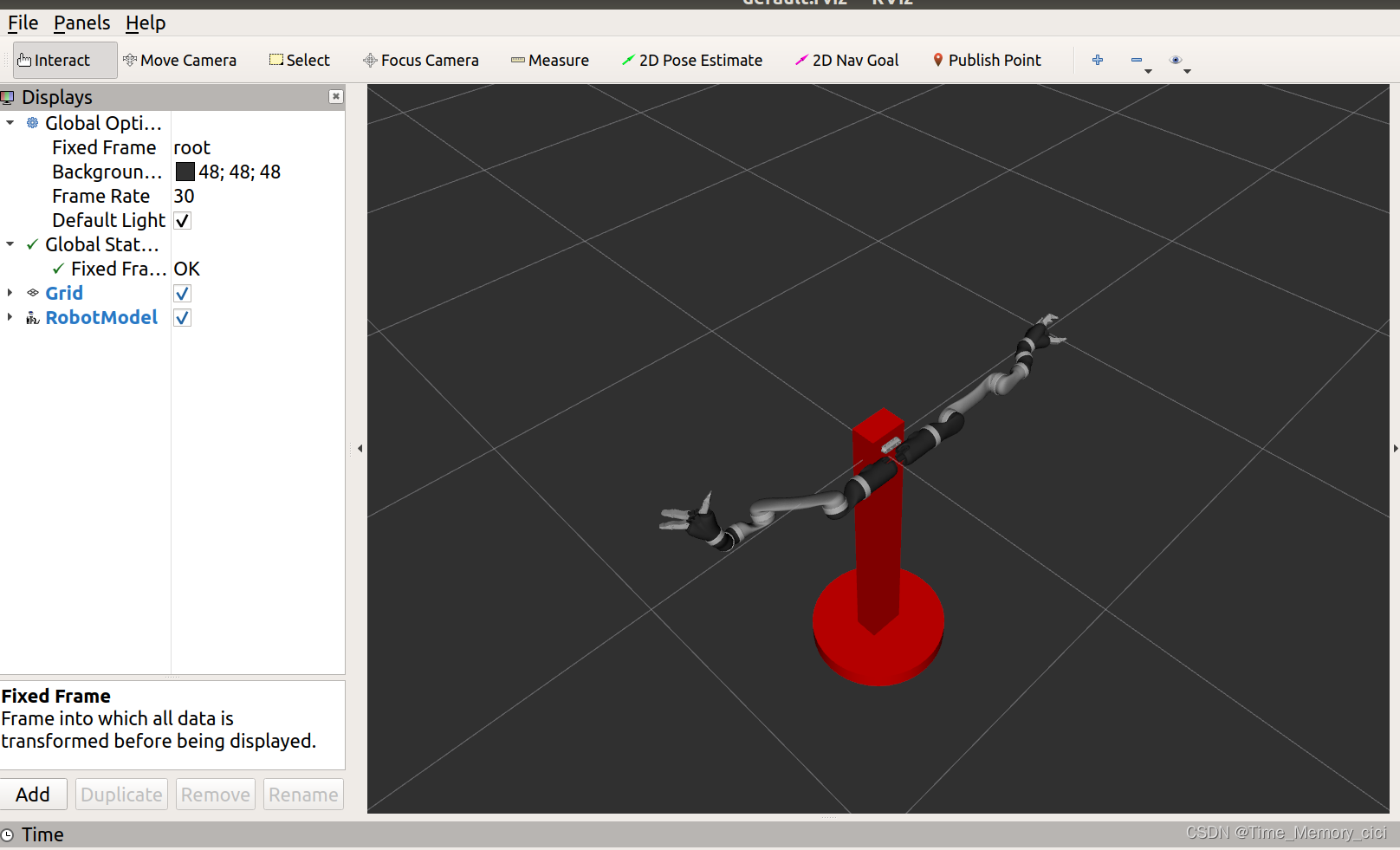
为了更直观的观看关节链接情况,我们在同一个目录下输入下面这行命令,就会得到 j2s6a300.gv 和 j2s6a300.pdf两个文件,打开pdf如下图所示。添加机器人模型RobotModel,Fixed Frame根据自己的机器人模型选择,我这里是root。二、进入xacro所在的文件夹,完成xacro文件到urdf文件的转换。注意:这里模仿着同目录下的文件写就可以,很简单,就是写几个节点。转
CoppeliaSim安装教程(以前叫V-REP)
当笔记本外接一款非常好用的静音键盘后,会出现一些问题。例如:外接键盘F1-F12与笔记本不同步。具体一个例子就是,在运行matlab程序时,需要点编辑器—运行,这样就很麻烦,直接运行的快捷键是笔记本键盘上的F5,而外键键盘F5则是其他功能,我这里是搜索。为什么我不直接按笔记本的F5,因为这样我的胳膊要一直伸到很远的地方,很不方便。笔记本F1== 外键键盘fn+F1。

参加Matlab与AI讲座:使用深度强化学习训练走路机器人观后感

ubuntu18.04安装远程控制软件ToDest方法,针对官网指令报错情况

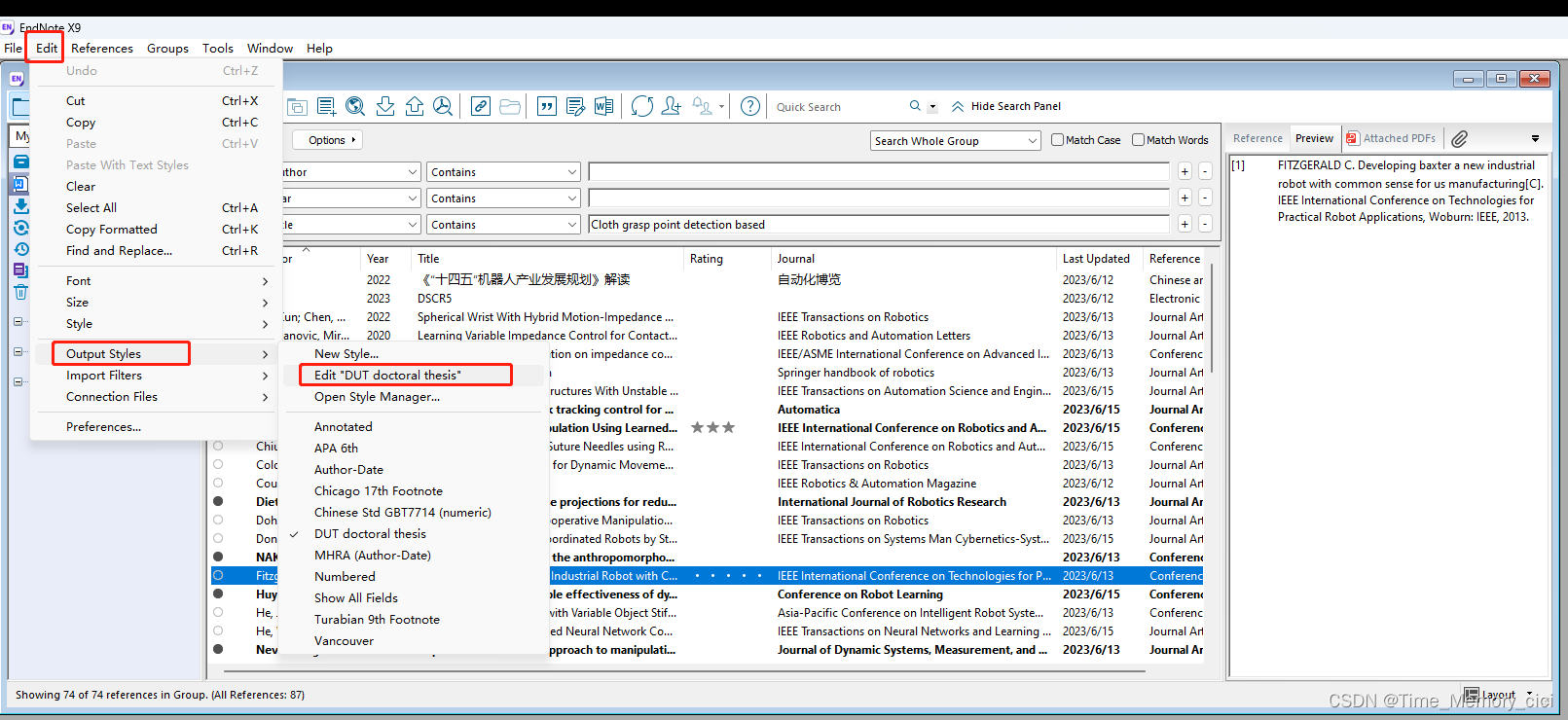
还有一个非常重要的原因是,无论是从web of science或者Google学术下载并导入到endnote的参考文献,文章标题格式不一,上述两者情况都有,因此如何统一修改呢?(100左右或更多),而每个期刊的要求是不一样的,因此手动输入或修改参考文献的格式是愚蠢的(添加专有名词到Endnote的库中,让EndNote识别这个专有名词,不改变它们的大小写。),所以需要强大的endnote来进行管理
杨辰光教授是英国布里斯托机器人实验室主任,也是华南理工大学的教授,非常厉害的一位老师,机器人方向的大牛,Google学术被引超多,发表了多篇机器人方向的顶刊论文,包括TRO等,主要研究兴趣为神经网络和机器人控制(我还买了杨辰光老师联合编写的智能控制书籍,主要负责神经网络章节)。感觉杨辰光老师和贺威老师还有李智军老师都互相认识,他们联合发表了很多机器人方向的高质量论文,非常值得阅读。题目:基于自适应