- @ThzxRHwXWOS
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
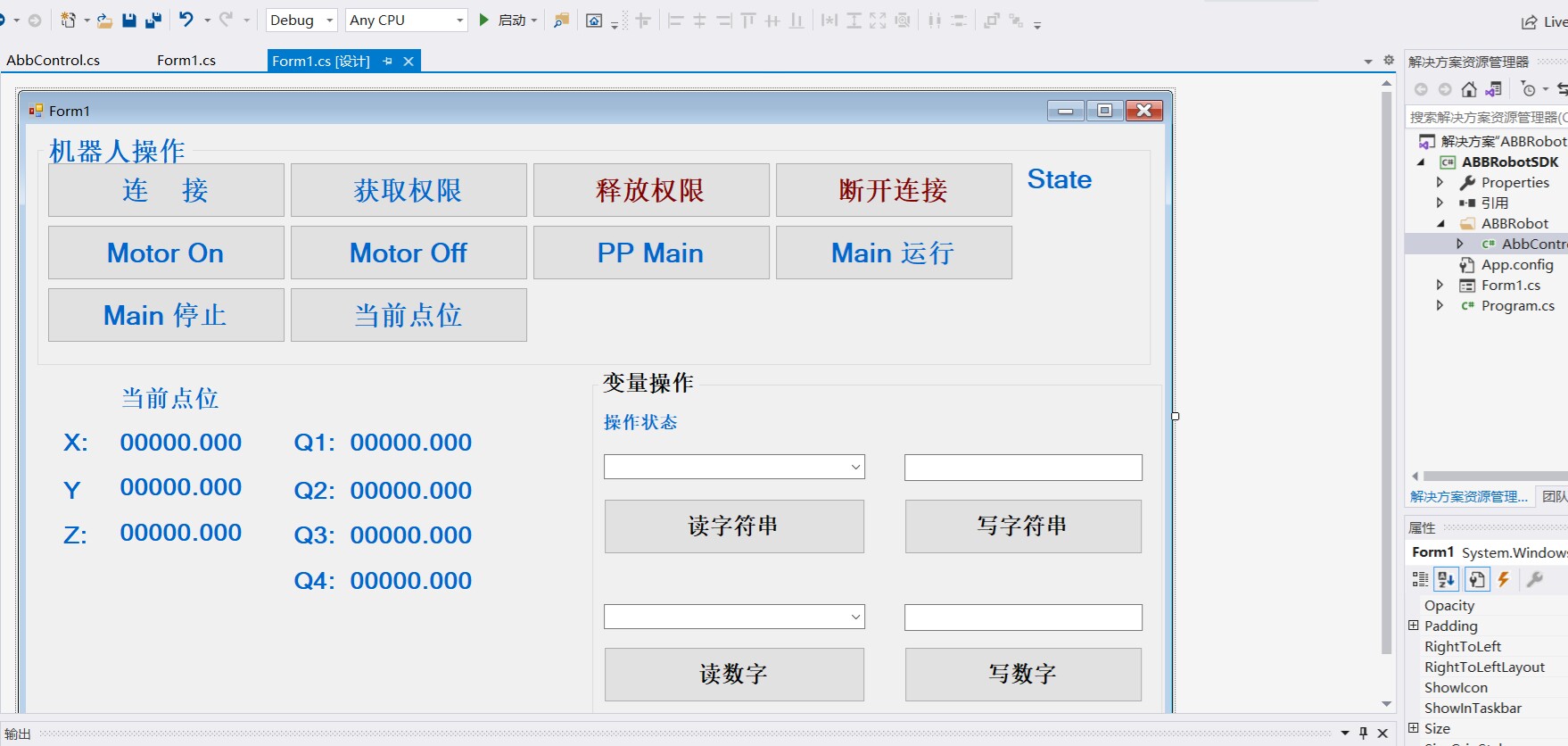
通过这种方式,利用C#结合自定义的ABB机器人类,就能轻松实现对ABB机器人点位信息的读取和写入,为ABB机器人的二次开发提供了有力支持,满足各种复杂的自动化任务需求。而二次开发能让ABB机器人更好地适配特定业务场景,今天咱们就来聊聊如何用C#实现对ABB机器人数据的读取和写入,特别是点位信息的获取与写入。首先,咱自己写了个ABB机器人类,这个类涵盖了机器人常规操作功能,为二次开发奠定了良好基础。
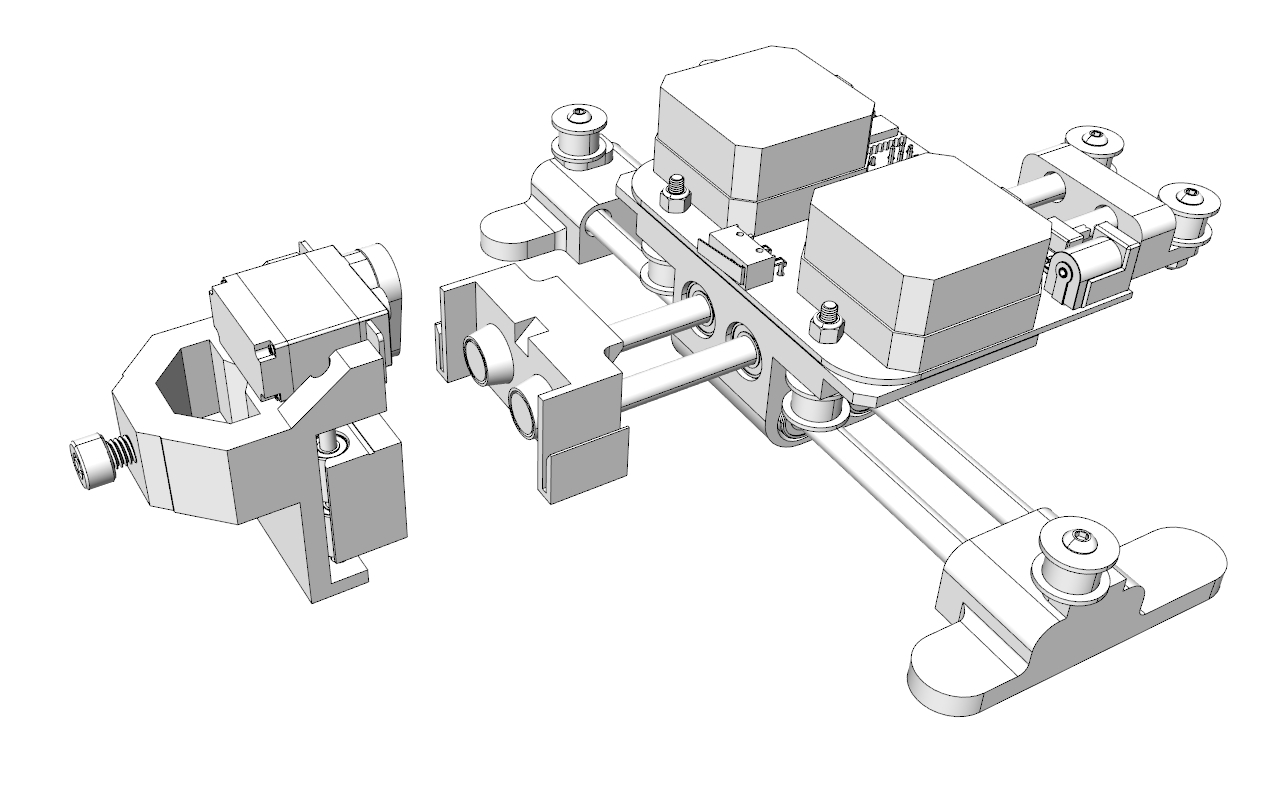
注意HAL_Delay的值要根据步进电机步距角调整,我用的是0.9度电机,延时2ms刚好能让笔迹连贯。最近折腾了个基于STM32的写字机器人,从硬件画板到代码调试踩了不少坑,这里把核心模块拆开说说。主控用的是性价比极高的STM32F103C8T6,这货72MHz主频带PWM外设,驱动两个42步进电机绰绰有余。PCB布局要特别注意电机驱动模块的散热,我在底层铺了整块铜皮接GND,实测连续工作半小时温
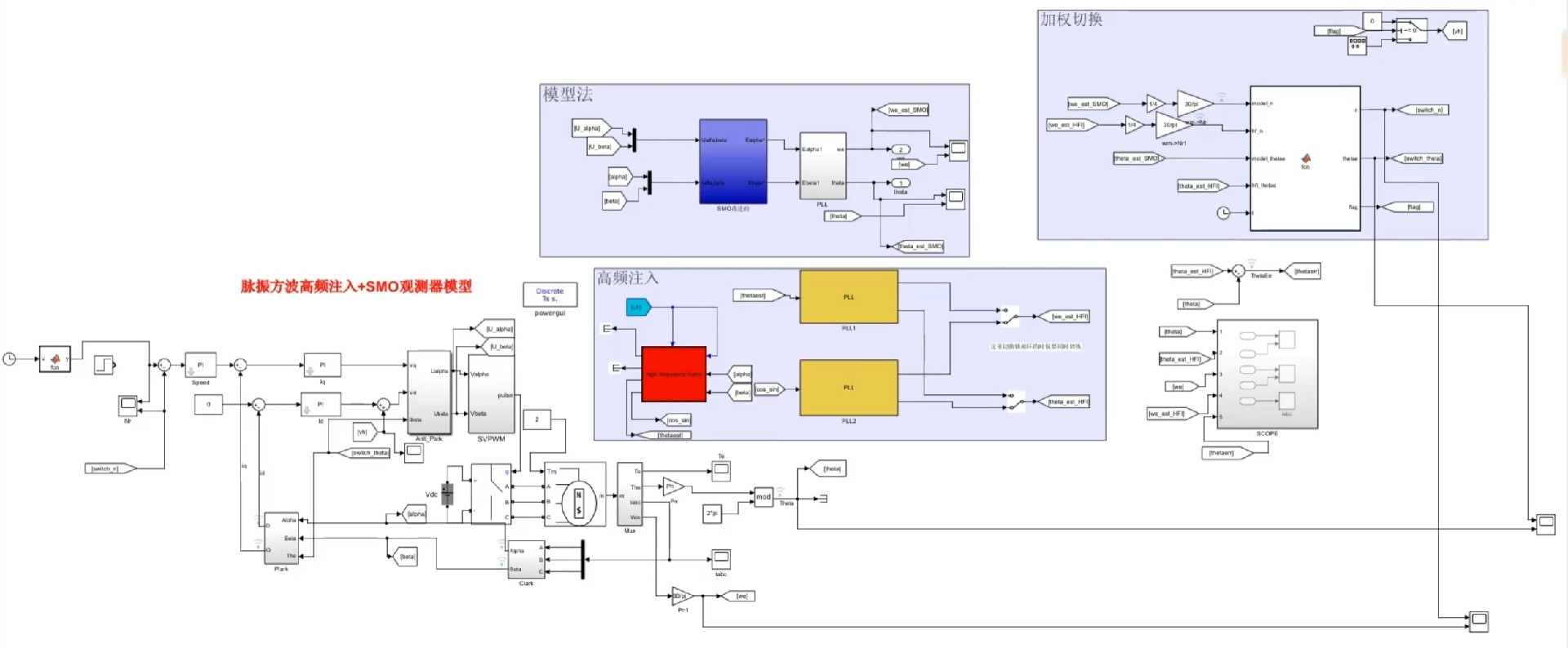
永磁同步电机全速域无位置传感器控制(高频注入+改进滑膜控制方法,PMSM矢量控制仿真)永磁同步电机-PMSM的仿真-原理-算法-复现1)关于PMSM控制算法的文章复现、matlab编程仿真等均可,Matlab/Simulink仿真建模 分析建模 文献复现、matlab 编程、simulink仿真,SVPWM。2)关于PMSM的算法辅导,论文实验指导3)有关于PMSM的双闭环矢量/PID/ADRC自
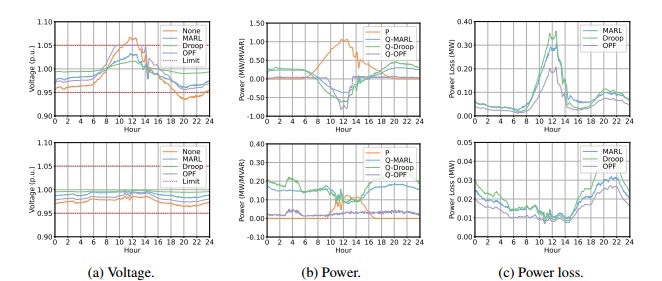
主动电压控制被认为是一种很有前途的解决方案,可以在不额外硬件投资的情况下缓解电力拥塞和改善电压质量,利用电网中的可控设备,如屋顶光伏(pv)和静态无功补偿器(SVCs)。针对电压主动控制问题的不同场景,采用7种最先进的MARL算法进行了大规模实验,将电压约束转化为势垒函数,并从实验结果中观察到设计合适的电压势垒函数的重要性。针对电压主动控制问题的不同场景,采用7种最先进的MARL算法进行了大规模实
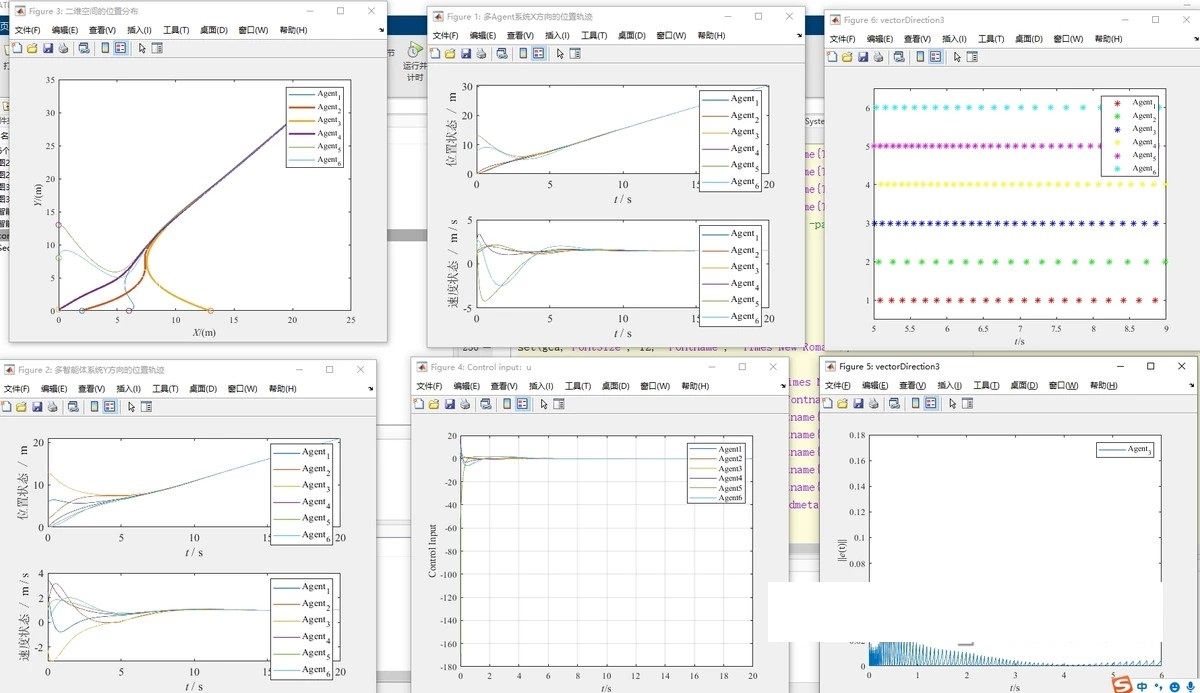
本系统实现了一个带有领导者的二阶多智能体系统,采用分布式事件触发控制策略来实现多智能体的一致性控制。系统包含6个跟随者智能体和1个领导者智能体,在二维空间中进行协同运动。
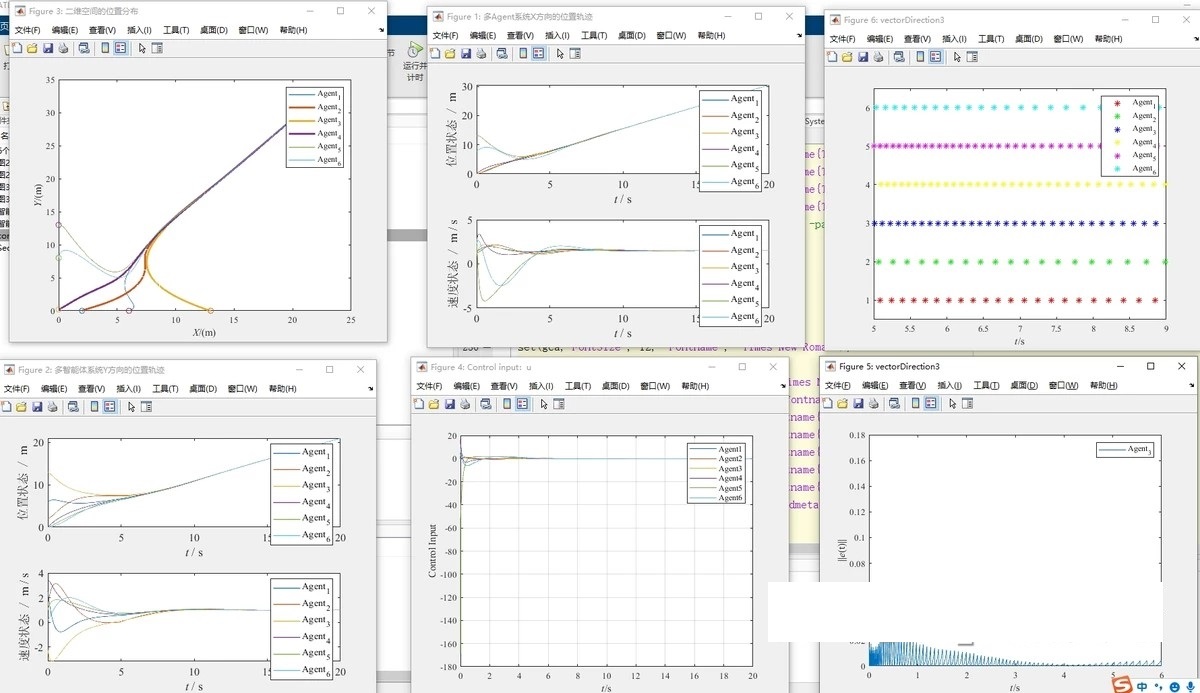
本系统实现了一个带有领导者的二阶多智能体系统,采用分布式事件触发控制策略来实现多智能体的一致性控制。系统包含6个跟随者智能体和1个领导者智能体,在二维空间中进行协同运动。
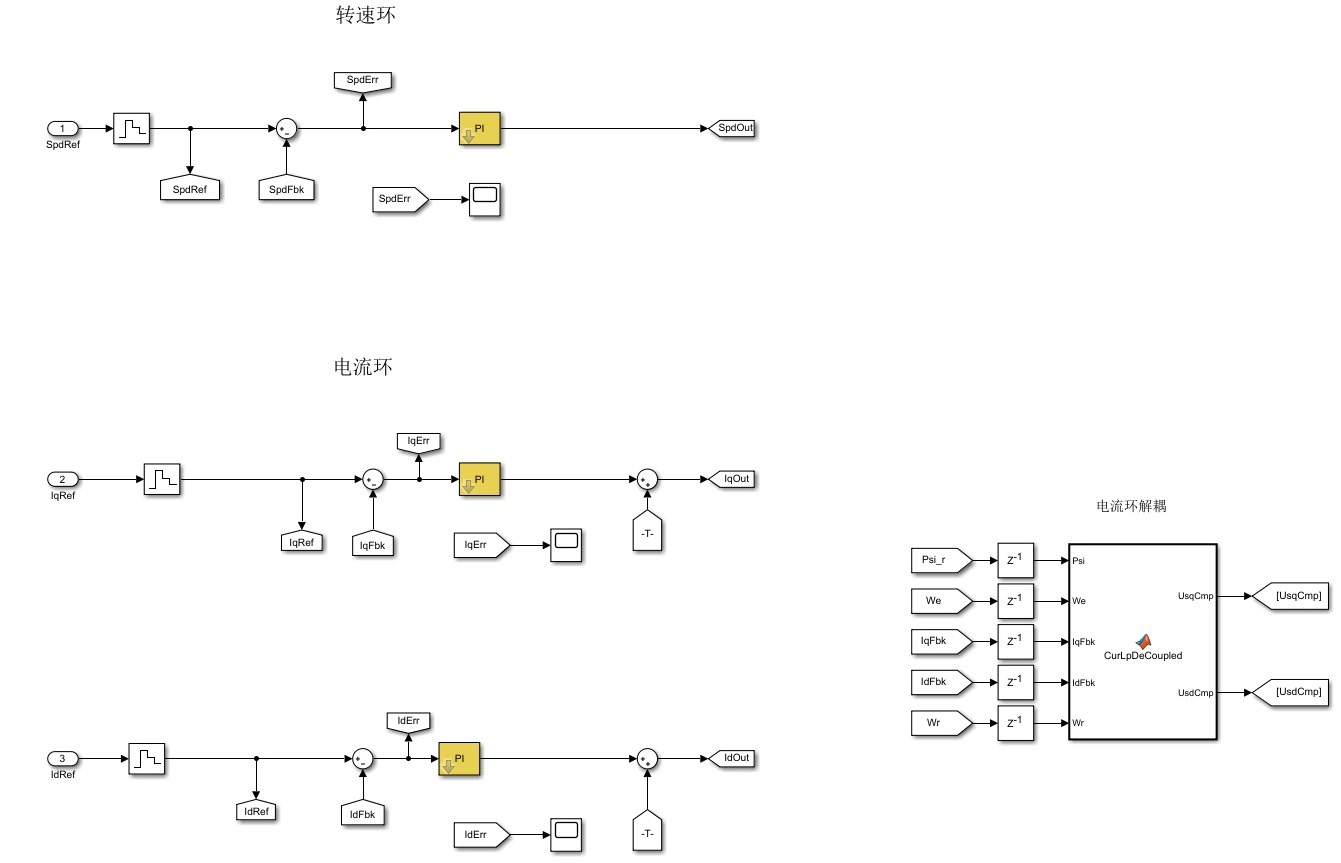
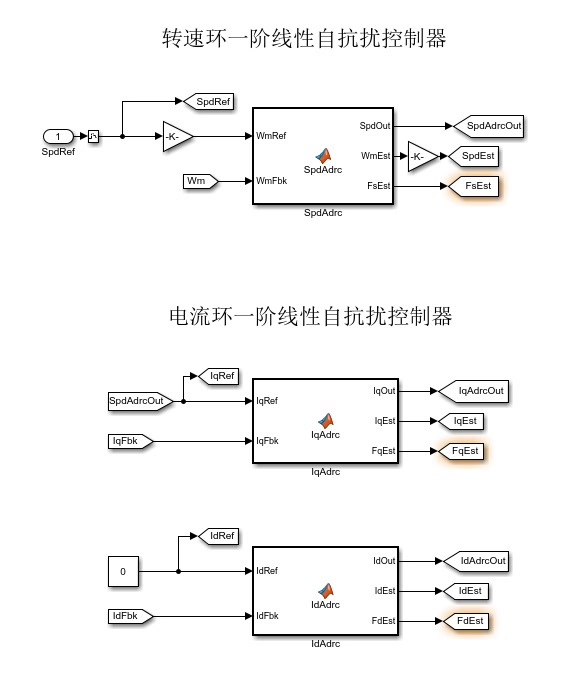
这个模型里的“家伙事儿”还挺多,主要有DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark,还有采用一阶线性自抗扰控制器的速度环和电流环等模块。这里面的SVPWM、Clark、Park、Ipark以及线性自抗扰控制器模块,都是用Matlab function编写的,这就有意思了,为啥呢?因为它和C语言编程很接近,以后要是想搞实物移植,那可就方便多啦。而且
该模型采用龙贝格观测器进行无传感器控制其利用 PMSM 数学模型构造观测器模型,根据输出的偏差反馈信号来修正状态变量。当观测的电流实现与实际电流跟随时,可以从观测的反电势计算得到电机的转子位置信息,形成跟踪闭环估计。龙伯格观测器采用线性控制策略代替了 SMO 的变结构控制,有效避免了系统抖振,具有动态响快、估算精度高的优点在电机控制领域,无传感器控制技术一直是研究热点,而今天要探讨的就是采用龙贝格
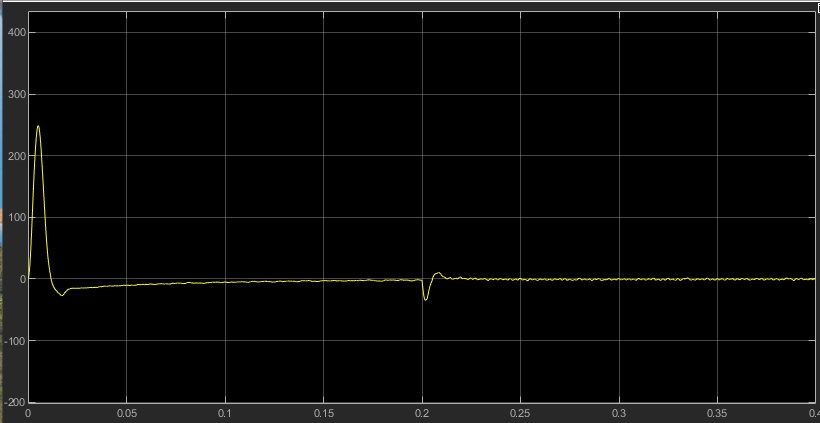
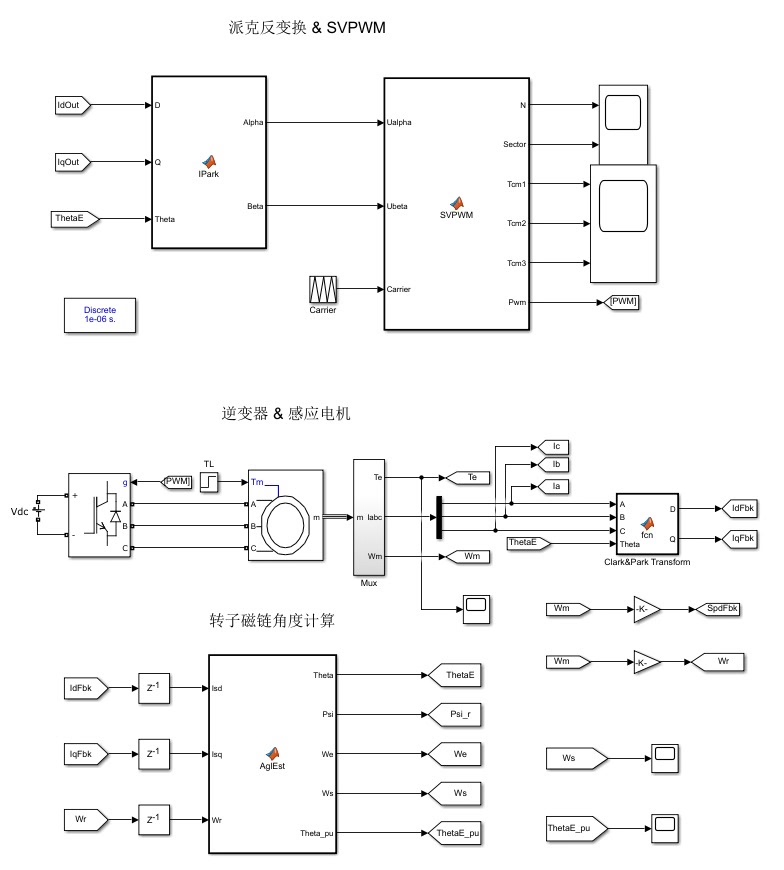
模型内主要包含DC直流电压源、三相逆变器、感应(异步)电机、采样模块、SVPWM、Clark、Park、Ipark、采用一阶线性自抗扰控制器的速度环和电流环等模块,其中,SVPWM、Clark、Park、Ipark、线性自抗扰控制器模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。在转速环中,由于自抗扰控制器无积分环节,因此无积分饱和现象,无需抗积分饱和算法,转速
模型内主要包含DC直流电压源、三相逆变器、感应(异步)电机、采样模块、SVPWM、Clark、Park、Ipark、PID、速度环、电流环等模块,其中,SVPWM、Clark、Park、Ipark、PID模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。咱们边看代码边唠嗑,看看这波自动化怎么实现的。本仿真中最大的亮点是双环PI参数自整定,只需输入正确的电机参数(电