- @QUFridIM
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
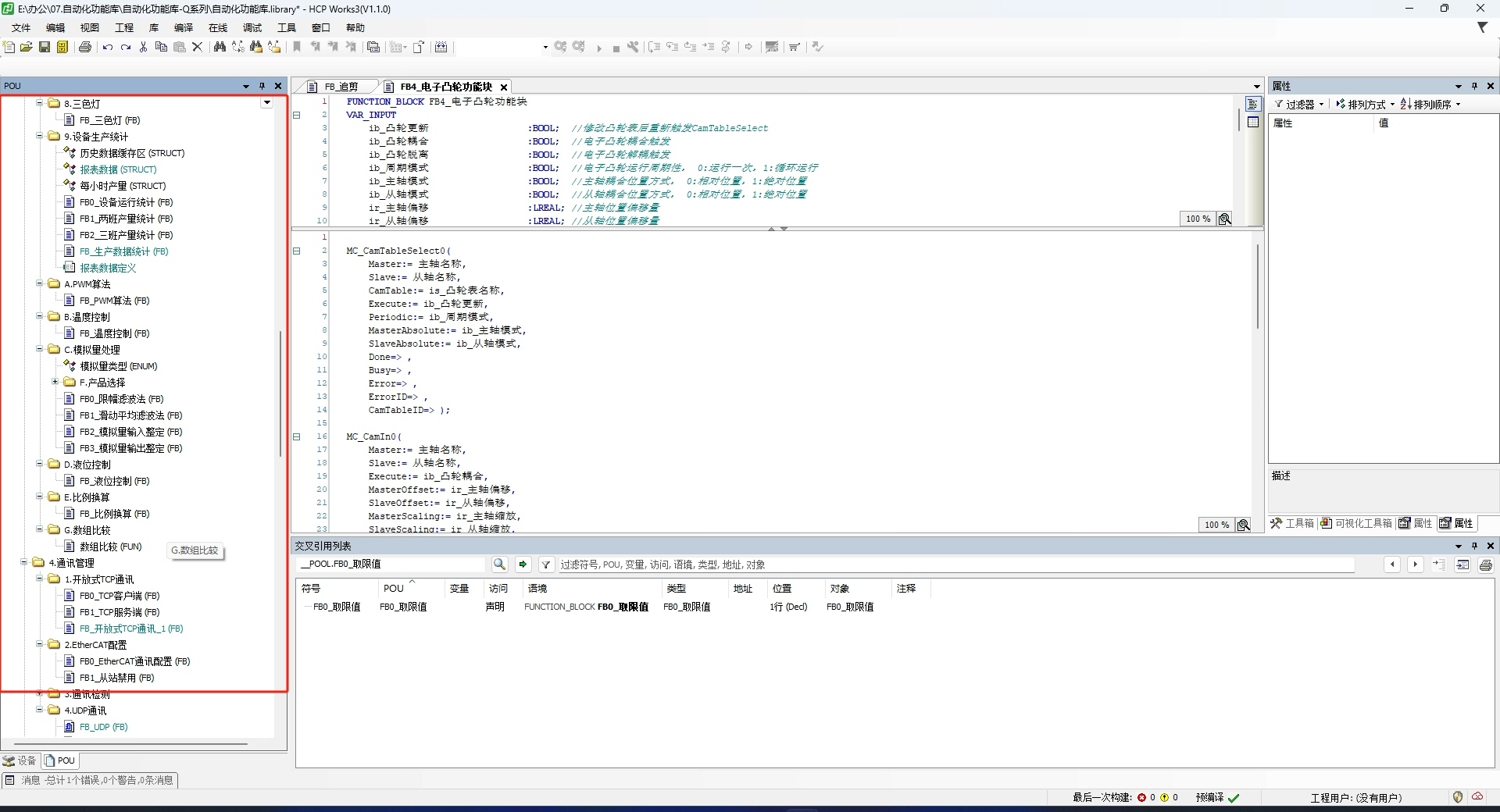
最近有个做包装机的哥们,直接把我们的状态机模板和第三方视觉库对接,三天就搞定了以前要两周的开发任务。工业自动化这行干久了,总有几个让人头秃的瞬间:每次项目都要重新造轮子,设备联调时发现程序结构千奇百怪,新同事接手代码就像在破译外星密码...直到去年我们团队把CODESYS开发框架彻底重构,现在终于能笑着写PLC程序了。最骚的是存储指针可以指向SD卡、数据库甚至云平台,想存哪就存哪,比瑞士军刀还灵活
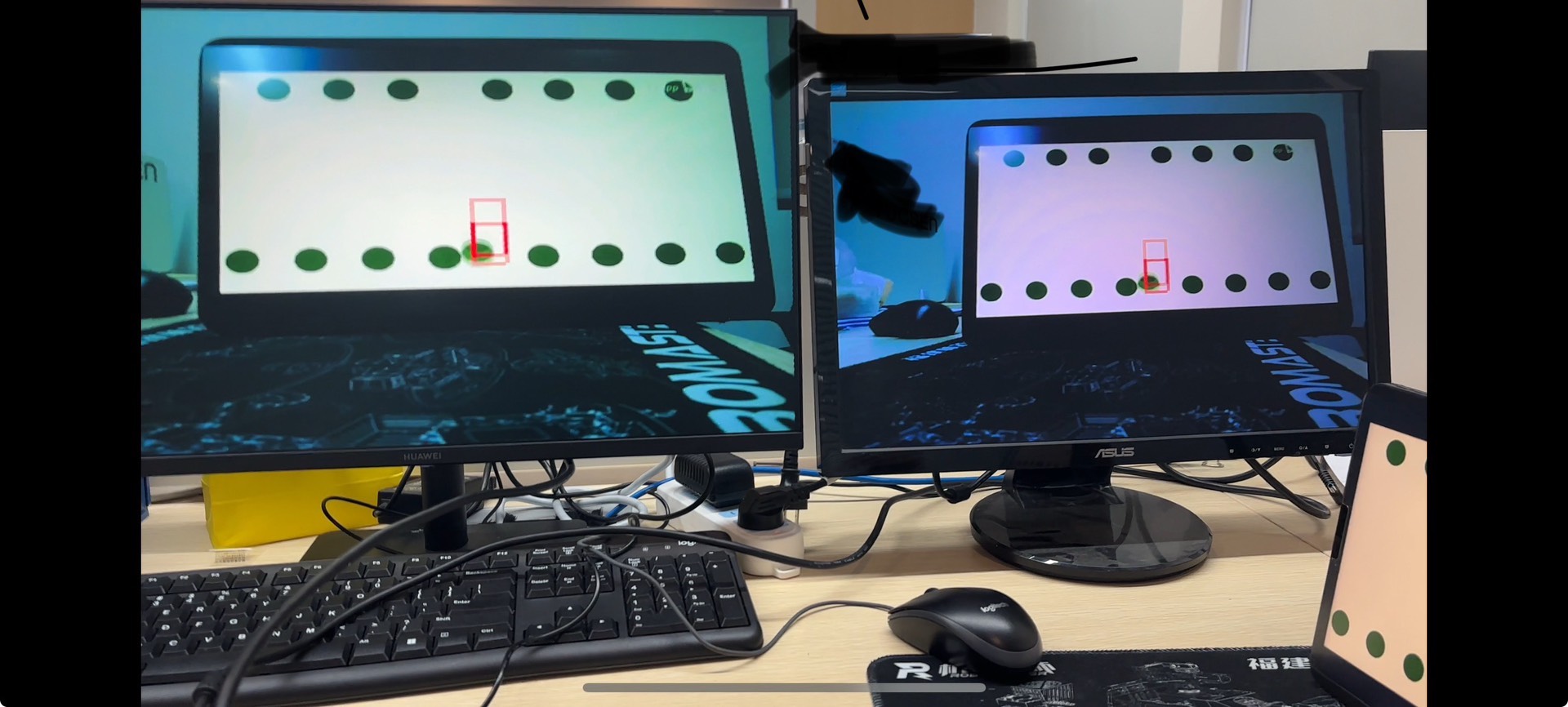
最后说说资源占用:帧差法核心模块大概消耗1200个LUT,形态学处理占800LUT,整个图像处理流水线控制在30%的逻辑资源内。这种方案比纯软件方案延迟低得多——从光信号进入摄像头到HDMI输出显示,整个链路延迟控制在3帧以内,用来做无人机避障或者智能门铃之类的场景完全够用。调参阶段建议在VGA接口上叠加OSD显示调试信息,比如用红色边框标记运动区域,同时显示当前帧率和阈值参数。实测时发现直接跨时
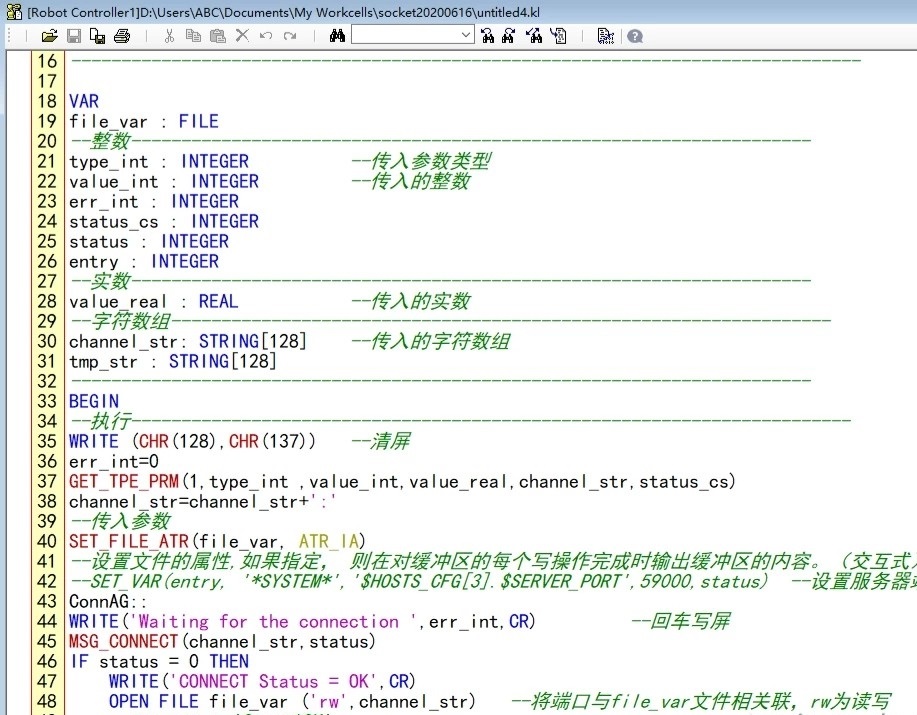
FANUC发那科机器人以太网通信,Socket Message通讯,KAREL程序.KL karel程序,发那科机器人TCP以太网通讯,与PLC、上位机、相机进行数据交换,可连接第三方相机,接收相机偏移量,也可实时将机器人当前位置发送给上位机。FANUC发那科机器人以太网通信,Socket Message通讯,KAREL程序.KL karel程序,发那科机器人TCP以太网通讯,与PLC、上位机、相
推荐结果A/B测试不能少,新用户先用热门榜单过渡,等行为数据积累到50条再切算法推荐。这个行为记录方法妙得很,用户浏览、加购、评分时都能调用,为推荐算法积累数据。为用户推荐多种商品,同时实现登陆、搜索、浏览商品、评论评分、加入购物车等多种功能。为用户推荐多种商品,同时实现登陆、搜索、浏览商品、评论评分、加入购物车等多种功能。商品推荐系统 基于机器学习的商品推荐系统 基于深度学习的商品推荐系统。商品

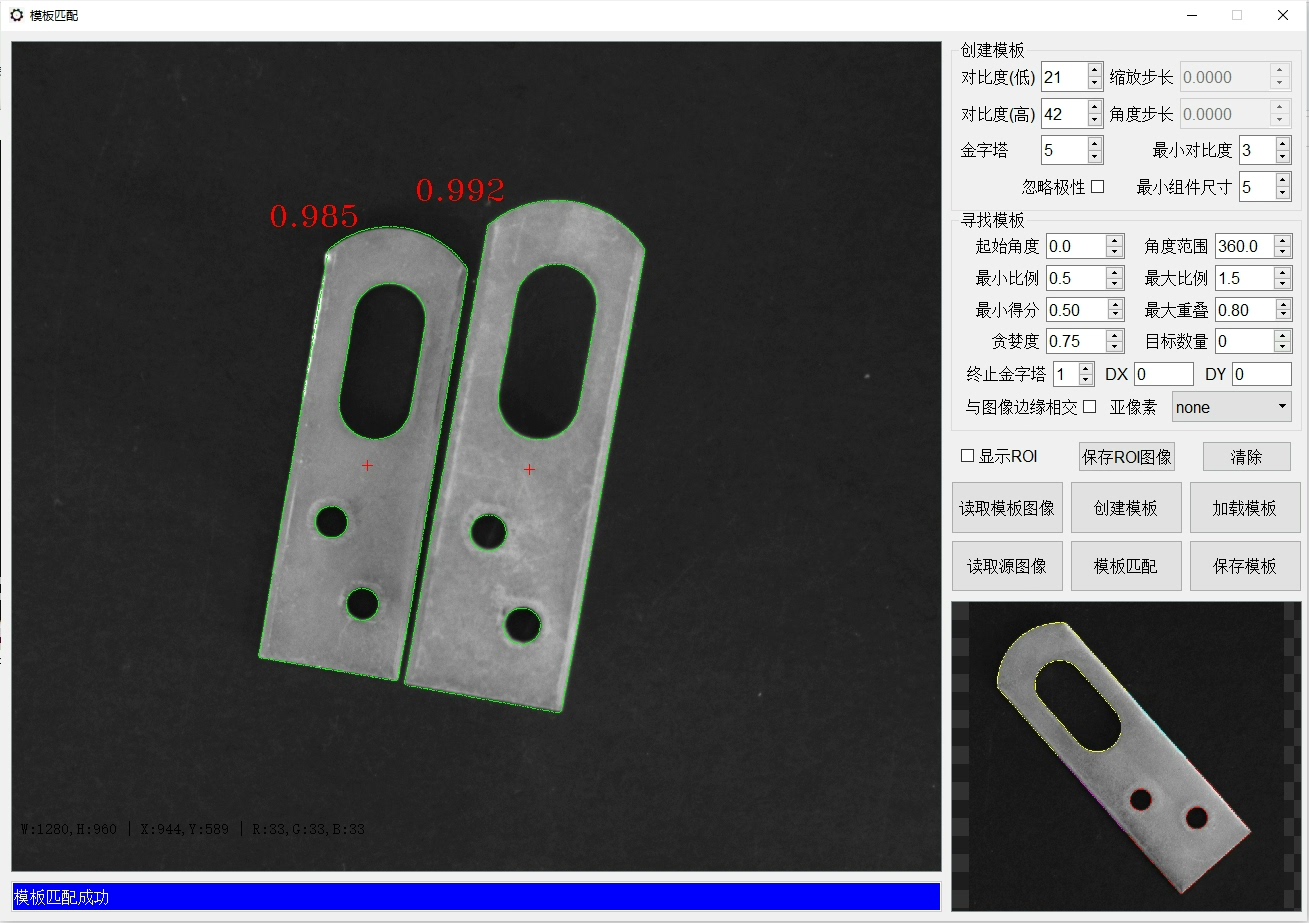
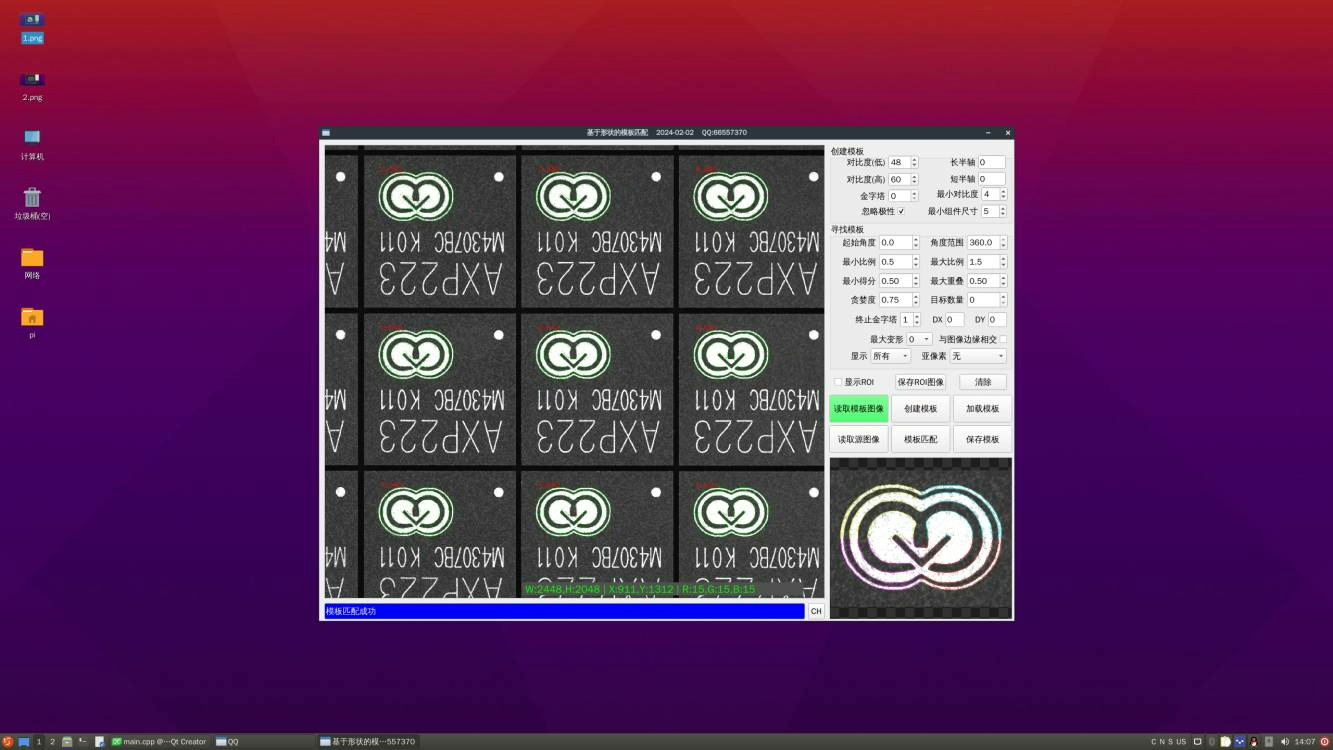
基于形状的模板匹配旨在通过比较模板和图像中对象的形状特征来寻找匹配区域。与基于灰度值的匹配不同,它对光照变化、噪声等因素有更好的鲁棒性。在 OpenCV 中,有多种方法可以实现基于形状的模板匹配,比如使用轮廓匹配等。
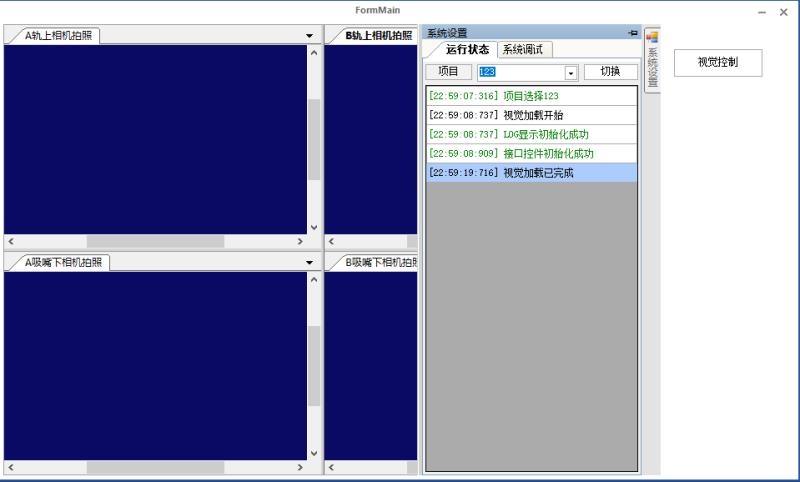
CognexPlusDll 是基于 C# 开发的上位机视觉检测通用框架,深度集成 Cognex VisionPro 视觉处理库,专为工业视觉检测场景设计。该框架采用模块化架构,支持多相机管理、视觉标定、图像检测、参数配置、用户管理等核心功能,已在多个实际工业项目中落地应用。框架兼容 .NET Framework 4.5.2 及以上版本,通过灵活的配置机制和可扩展的工具链设计,能够快速适配不同类型的
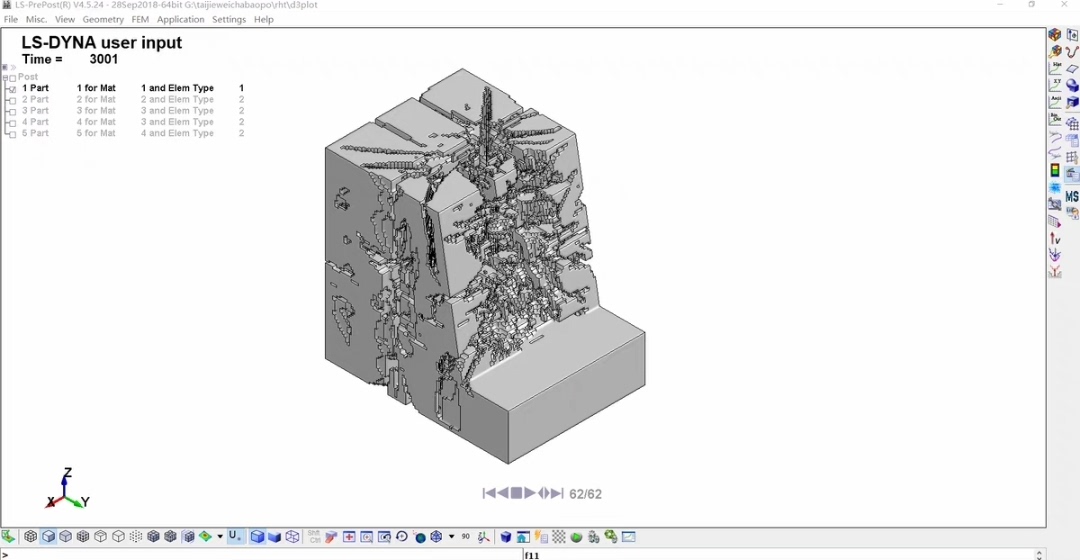
LS-DYNA边坡台阶微差爆破在岩土工程领域,边坡台阶微差爆破是一种极为重要的施工技术,它对于确保边坡稳定性以及高效破碎岩石至关重要。而 LS - DYNA 作为一款强大的通用显式动力分析软件,为我们深入研究和模拟这一过程提供了有力工具。
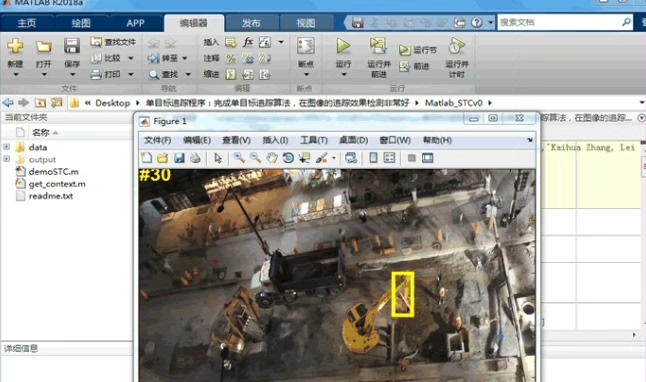
OpenCV里自带了好几种现成的追踪器,比如KCF、CSRT、MOSSE这些,各有各的优缺点:KCF快但抗遮挡差,CSRT慢一丢丢但稳得一批,我们最后用的就是CSRT,毕竟追猫这种爱钻缝的主儿,稳比快重要。这个函数绝了,不用自己手动写坐标,直接拖鼠标拉框就行,选完按回车就确认,当时我们框的就是那橘猫的脑袋,别框太宽啊,框太宽把背景带进去,追踪器容易被别的东西干扰。反正这个代码真的足够应付大多数日常
自研模板匹配,Windows,Linux,ARM都可用,C++,跨平台,基于形状的模板匹配,openCV实现,halcon替代在计算机视觉领域,模板匹配是一项基础且重要的技术。今天咱们聊聊如何实现一款能在Windows、Linux以及ARM平台都能使用的基于形状的模板匹配,并且用C++结合OpenCV来完成,同时探讨下Halcon替代方案。
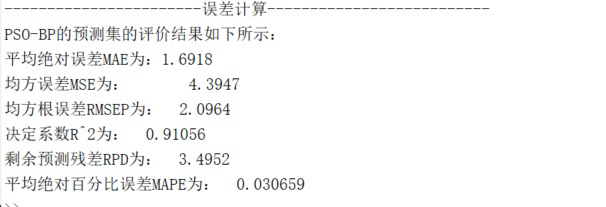
利用遗传算法GA和粒子群算法PSO优化算法,将BP神经网络训练集的MSE作为适应度函数,获取最优的权值和阈值在反向输入到BP神经网络里构建回归预测模型,同时能够打印出模型的多个评价指标,具体效果可以看图在机器学习领域,BP神经网络是一种常用的模型,但它初始权值和阈值的随机设定,常常导致模型陷入局部最优,影响预测精度。遗传算法(GA)和粒子群算法(PSO)作为优秀的优化算法,可以用来解决这个问题。今