- @Poulen
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
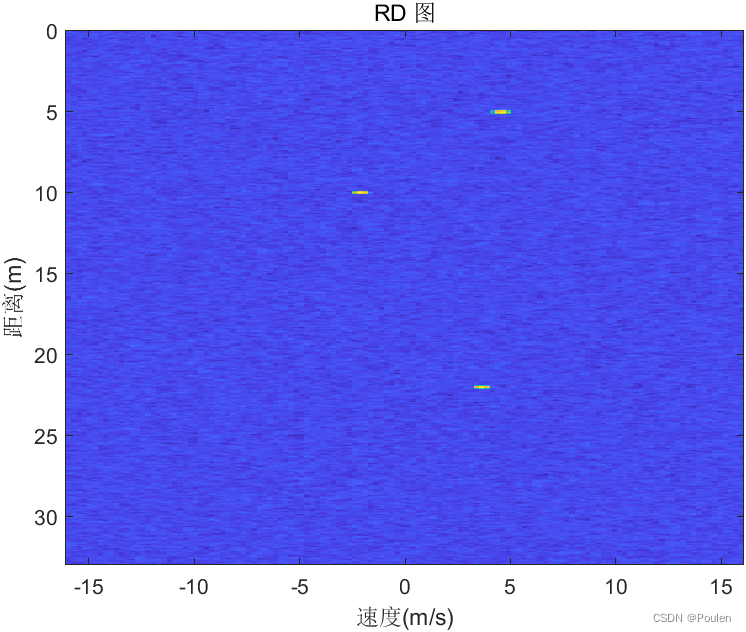
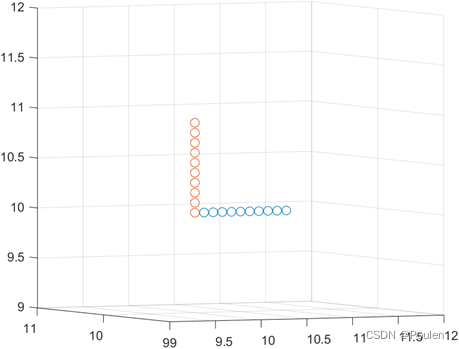
本期内容为3D点云目标获取的延续工作,在距离、速度、方位角估计的基础上,通过设计L型阵列结构,进一步实现目标俯仰角的估计,最终实现目标4-D点云的获取。首先,通过中频信号建立仿真信号模型,并设计1发N收的L型阵列结构接收目标回波信号;通过对回波信号进行相应的信号处理,最终获得目标的4-D点云
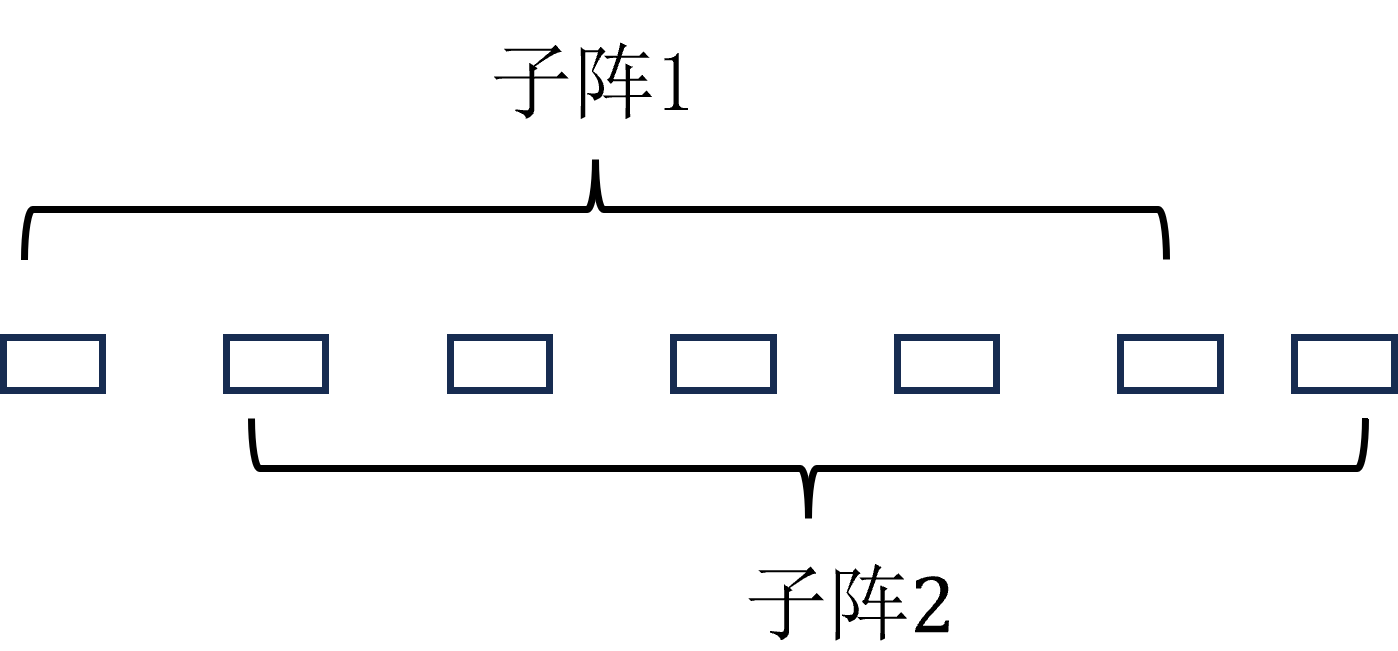
在实际的雷达目标DOA估计过程中,局限于1维DOA估计显然是不能满足现代雷达系统探测目标的要求,例如主流的4D雷达成像,不仅要估计目标的距离、速度、方位(水平)角外,还要估计目标的俯仰角,然而我们要同时获得目标的水平-俯仰向信息,在硬件层面,就需要拥有两个维度的天线。因此,本期内容通过L型阵列,并采用Music算法进行谱峰扫描实现目标的水平-俯仰向信息的估计,希望对各位读者带来帮助。
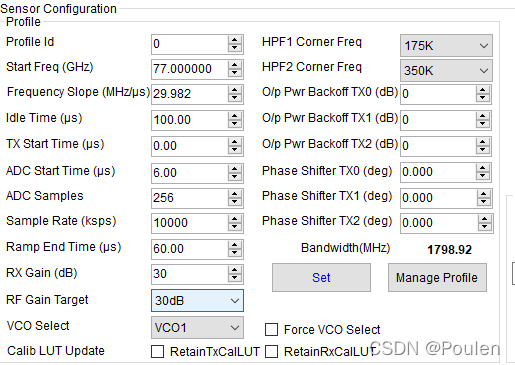
频率调制连续波(FMCW)毫米波雷达传感器在汽车和工业应用中越来越受欢迎。这些应用程序中的系统需求和关注点可能非常不同。距离要求、距离分辨率、最大速度要求、传感器视场、数据存储、处理器MIPS等都是基于最终应用需要分析的一些方面。了解FMCW Chirp配置与系统性能参数之间的关系有助于选择正确的Chirp配置。TI公司的毫米波雷达设备(MMIC)在配置Chirp参数方面提供了很大的灵活性,也允许
摘要:在这篇博文中,将会对demo的主函数分片段来描述它的作用,并且会对一些函数作用进行描述。主程序是案例代码的入口,进入主程序,我们会先看到定义三个变量参数,为了方便表述,下面将用参数一,二,三来表述;1)参数一是用于创建线程的线程参数,且是一个结构体,它与创建线程函数是密不可分的(如下中展示的创建线程函数就用到该参数作为它的输入参数)作用用于设置线程函数的优先级等;关于线程的相关知识可以参考操
ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques)最早是由Roy等人于1986年提出,是一种广泛应用于高分辨率方向到达(DOA)估计和频率估计的子空间方法。其核心思想基于信号子空间的旋转不变性,能够通过有限的快拍数据实现对信号参数的高精度估计。与经典的MUSIC算法相比,ESPRIT不依赖于复杂的
大家好,今天我写这篇文章主要介绍mmWave Radar AWR1843 boost 开发板的硬件组成部分,以帮助各位学习该模块的友友们对1843有一定的了解,更快的进入硬件的开发中。接下来我将基于TI AWR1843来讲解此开发板的硬件组成。AWR1843 IntroductionAWR1843是TI推出的一款能够在76至81GHZ频带中运行的集成单芯片FMCW雷达传感器,它集成了DSP子系统,
目录一、数据采集参数二、CFAR+1DFFT matlab源码三、程序运行结果本篇文章主要讲解xWr1xx+DCA1000采集的原始数据如何进行距离FFT,以及如何通过CFAR(恒虚警)技术检测的存在。这里所用的恒虚警采用最简单的CA-CFAR均值类恒虚警算法。在这里将给出恒虚+1DFFT的matlab程序。在这里不重复CFAR的理论知识部分,望各位如果需要了解有关CFAR的基础知识可以借鉴一、数
由于TDMA-MIMO采用不同单天线交替发射信号,没有更好的利用发射天线同时工作的发射资源,导致发射功率低以及损耗大,从而使得TDMA波形只能应用在近距离探测的低功率雷达场景。而DDMA波形则能很好的弥补TDMA上述缺点,与TDMA波形下单天线交替工作不同,DDMA波形下所有发射天线同时发射,但是每个发射天线的信号都加入一个特定的频率偏移(在速度维度体现为一个速度频移),通过这个人为偏移的频率使得
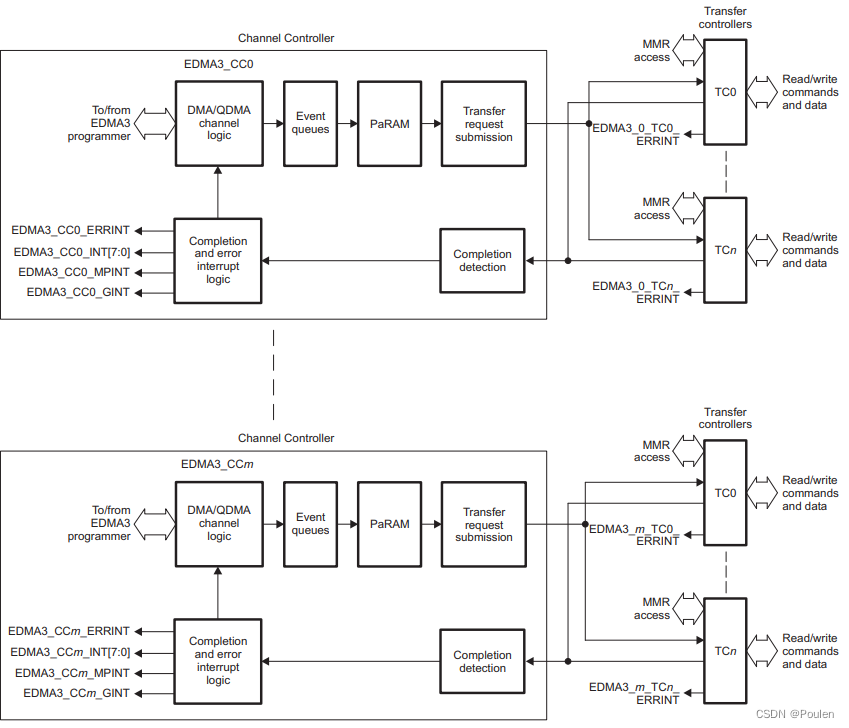
EDMA(Enhanced Direct Memory Access)是一种增强型的直接内存访问技术,用于高效地实现数据传输和处理。它是在传统的DMA(Direct Memory Access)基础上进行改进和扩展的。DMA是一种用于数据传输的技术,可以绕过CPU,直接在内存和外设之间进行数据传输,提高系统的数据传输效率。传统的DMA通常具有一些限制,如只能进行简单的内存到外设或外设到内存的数据传
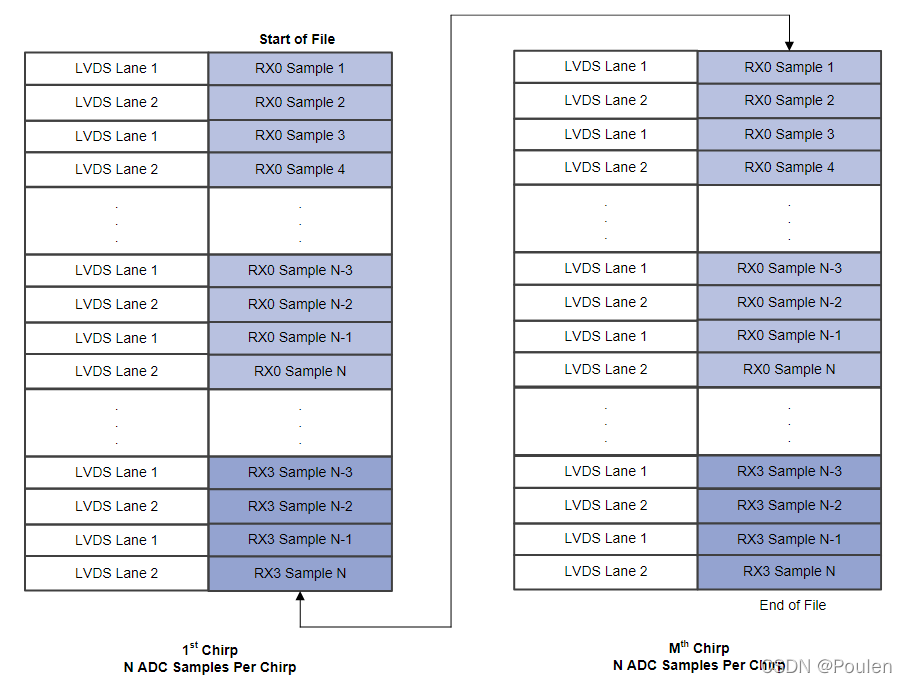
本篇文章主要讲解如何将DCA1000采集的原始bin文件再matlab中解读出来,从而方便后续的数据处理,例如距离FFT、2D FFT等处理。在讲解之前,默认各位已经掌握了利用xWr1xxx mmWave +DCA1000通过mmWave studio采集原始数据,在本篇文章中不过多讲解,如果对与上述测数据的操作尚有不解可以参照此文档,mmWave_studio_user。一、xWR1xx Wit