- @PkbCTkXi
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
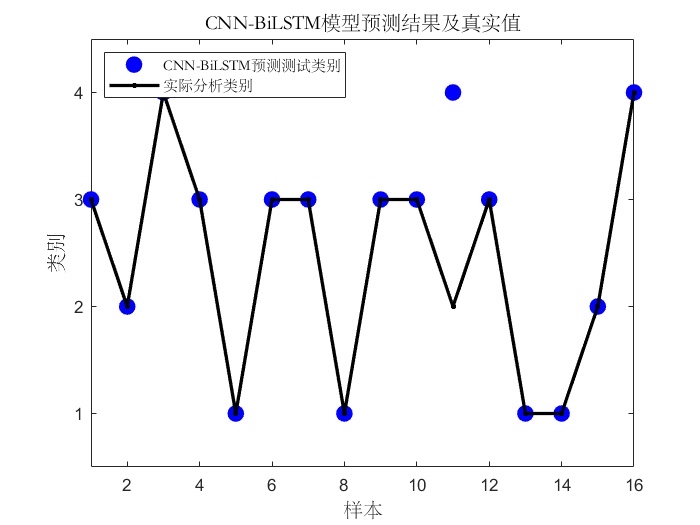
咱们直接上干货,看看这个CNN-BiLSTM模型怎么玩转多特征分类。遇到过的坑得提一嘴:输入数据的维度顺序容易搞反,Matlab要求时序数据格式是[特征数, 序列长度, 样本数],用permute函数调整维度顺序比reshape更安全。这段结构有几个关键点:1D卷积层用3大小的滤波器提取局部模式,batchNorm加速收敛,双向LSTM的sequence输出保留了完整时序信息。实测在12分类的工业
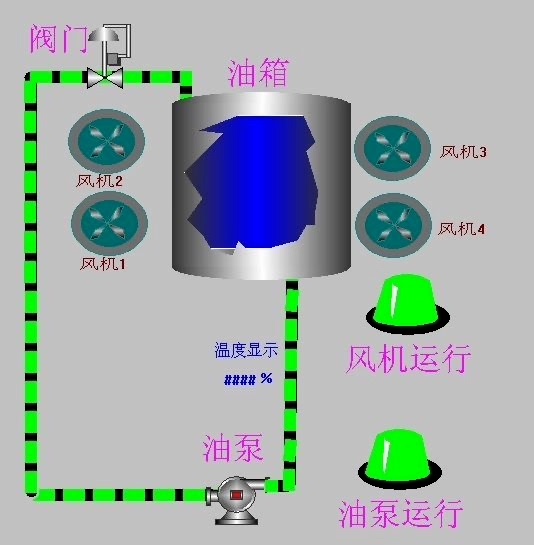
重点在那个/R 10.0,因为PT100的变送器输出是0-100℃对应0-10V,得做个标度变换。实际调试时最怕遇上信号漂移,有次现场发现温度乱跳,最后发现是柜子里变频器的干扰窜进模拟量通道了,加了个磁环才解决。哪天要是去改造这些系统,记得先给PLC电池换个新的——别问我是怎么知道的,说多了都是泪。二是I0.5这个限位开关必须用常闭点接入,去年有个项目因为限位接成常开点,结果调压机构直接撞到机械限
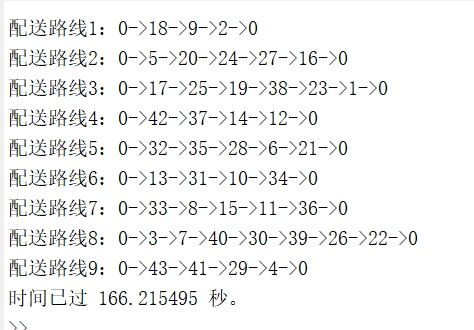
比如原路径是A-B-C-D-E,可能优化后变成A-C-B-D-E。今天咱们聊聊怎么用MATLAB实现一个带时间窗的改进遗传算法,重点是这个版本加入了大规模领域搜索,实测比传统遗传算法少跑20%冤枉路。目标是在不超载、不迟到的前提下,找到总距离最短的路线。带时间窗的改进遗传算法,可用于配送路径优化,改进点:添加了一个局部最优搜索--大规模领域搜索算法,收敛度更高,算法的结果更优。带时间窗的改进遗传算
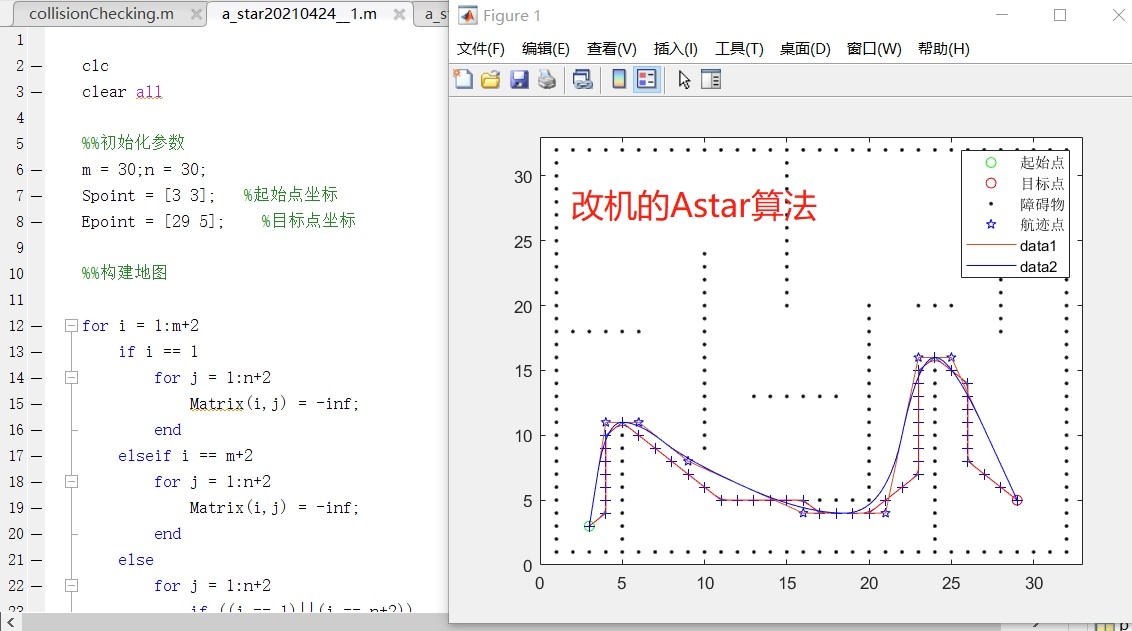
今天就带大家亲手调教自动驾驶的"大脑",用Matlab实现两种经典路径规划算法,看看它们怎么在复杂环境里杀出重围。改进A*(红色)与传统算法(蓝色)的对比令人震惊——新算法路径长度减少15%,计算时间下降62%。特别是在死胡同区域,改进后的算法会主动放弃局部最优,表现出更强的全局意识。凌晨三点的实验室,当改进算法第一次完美避开所有移动障碍物时,咖啡杯上的雾气都闪烁着代码的光辉。但原始RRT生成的路
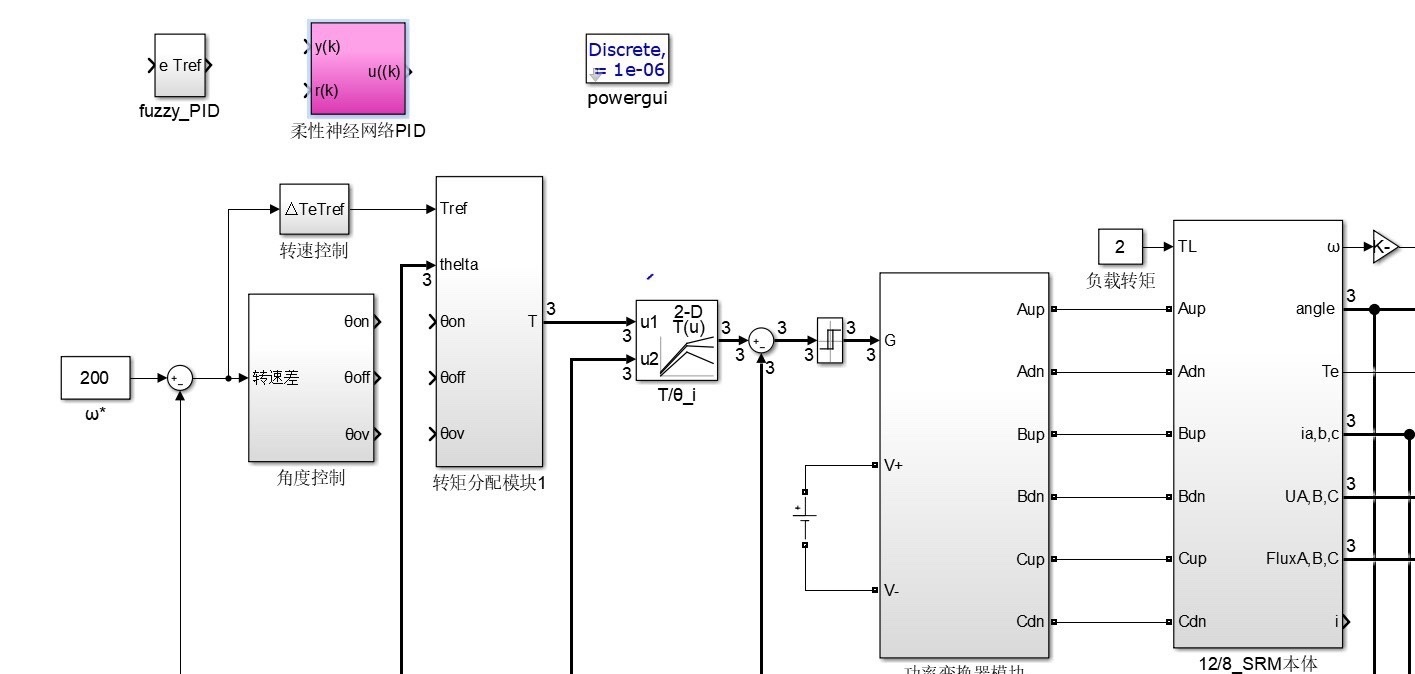
开关磁阻电机控制仿真(matlab 2016b版本仿真模型 自用)模型包涵:开关磁阻电机传统控制:电流斩波控制、电压PWM控制、角度位置控制。智能控制:12/8三相开关磁阻电机有限元分析本体建模、转矩分配函数控制、模糊PID控制、模糊角度控制、神经网络在线自适应迭代控制。部分离线迭代算法:遗传算法优化PID、粒子群算法优化PID。毕业研究生自用仿真模型嘿,大家好!今天来和大伙分享下我在开关磁阻电机
5辆车组成的编队实现ACC自适应协同控制,通过考虑前车的加速度和距离,实现自适应巡航控制,仿真平台基于carsim/Simulink实现。文件包含acc巡航建模资料和滑膜控制的资料,非常的详细,比一般只给文件仿真详细多啦,还有我本人滑膜控制的总结,对于滑膜控制的学习很有帮助。文件包含acc巡航建模资料和滑膜控制的资料,非常的详细,比一般只给文件仿真详细多啦,还有我本人滑膜控制的总结,对于滑膜控制的
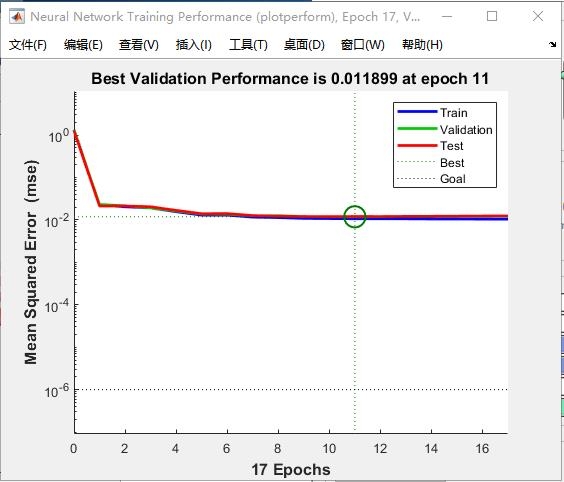
通过上述步骤,我们用Matlab实现了时间序列BP自回归神经网络预测,并确定了最佳自回归阶数和最佳隐层节点数。当然,实际应用中数据会更复杂,可能还需要更多的数据预处理和模型调优工作,但这个基本框架可以为你的研究或项目提供一个很好的起点。希望这篇文章对你有所帮助,欢迎交流讨论。时间序列bp自回归神经网络预测matlab程序代码 ,含最佳 自回归阶数和最佳隐层节点数的确定。
定义邻居权重1 0 1;1 1 1];% 满足条件则凝固成固相endendendend这里我们定义了邻居权重矩阵,用来确定每个元胞周围邻居对其状态转变的影响程度。在时间步循环里,对于每个内部元胞,计算其邻居的加权和。如果该元胞当前为液相(值为 0)且邻居加权和大于等于 1,就将其状态转变为固相(值为 1),模拟了实际中在周围固相影响下液相的凝固。
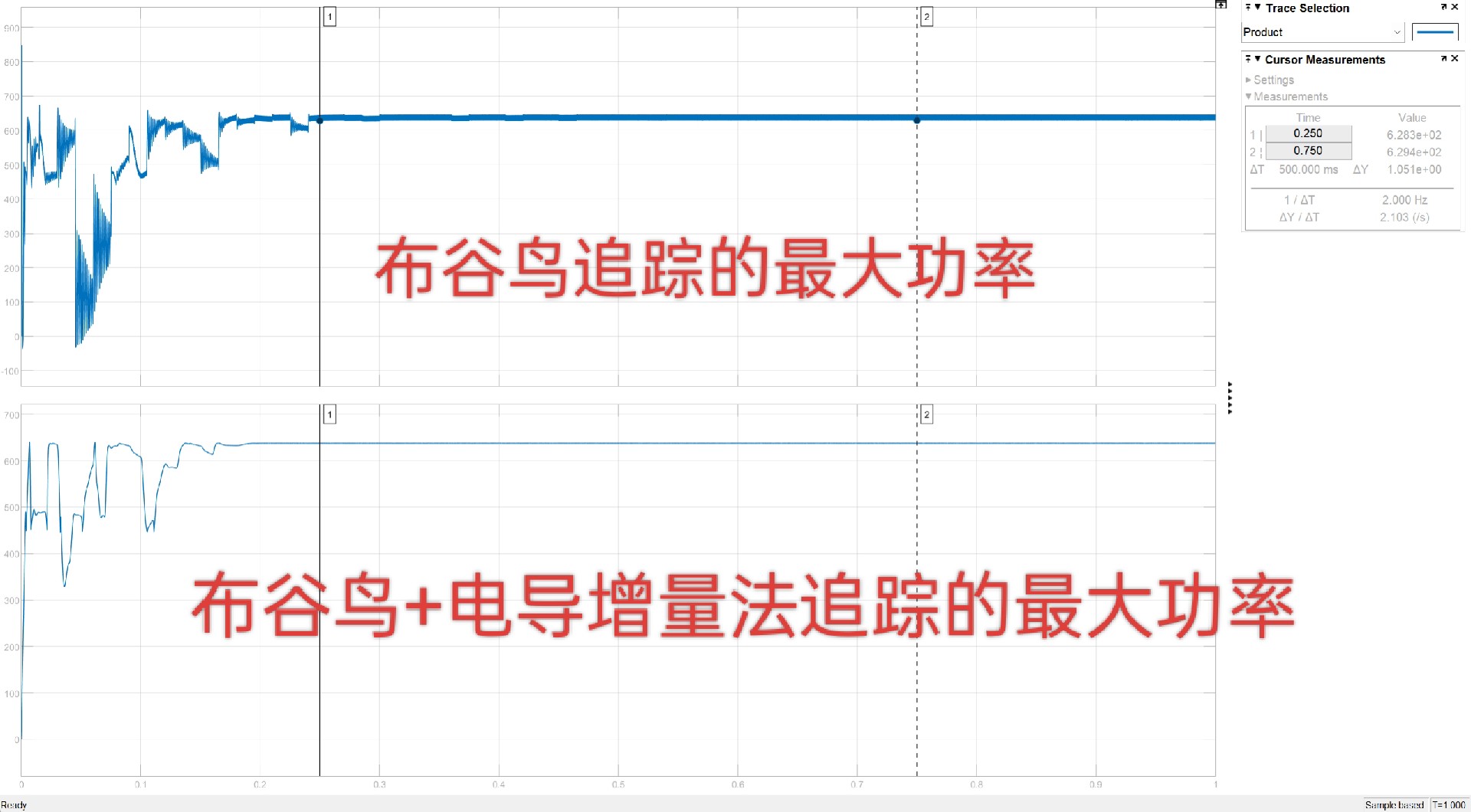
最终在dSPACE上的实验结果证实,这种杂交算法在晨昏交替时的功率捕获效率提升了19%,有点真香警告那味儿了。这种组合策略相当于让布谷鸟负责"开疆拓土",电导增量法负责"精耕细作"。实测发现当系统接近最大功率点时,步长会自动收缩到初始值的5%以下,这比固定步长方案少了约80%的震荡幅度。布谷鸟算法MPPT对照布谷鸟算法结合电导增量法MPPT。布谷鸟算法MPPT对照布谷鸟算法结合电导增量法MPPT。
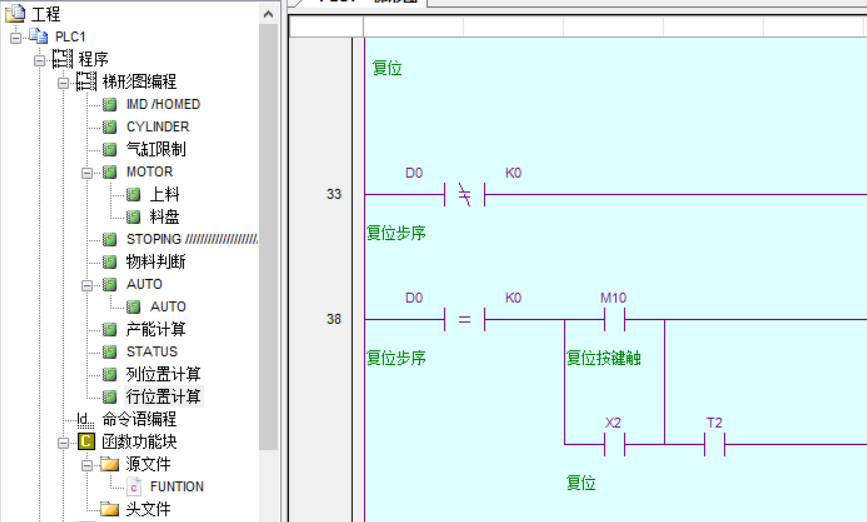
那些注释详细的子程序,分明在告诉新手:"这里可以随便拆,搞不坏"。信捷XD5程序+TG765触摸屏程序,功能为XY双轴排版机,带2个气缸,程序逻辑清晰易懂,功能有电机正反转修改,正负软限位,触摸屏密码修改,程序内嵌C语言块,适合新手学习。信捷XD5程序+TG765触摸屏程序,功能为XY双轴排版机,带2个气缸,程序逻辑清晰易懂,功能有电机正反转修改,正负软限位,触摸屏密码修改,程序内嵌C语言块,适合