




- @Lion996
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在应用3D检测时,项目中总会需要采集数据,来离线分析问题,而点云数据往往较为庞大,因此需要通过数据类型的转换来保存点云数据,达到数据压缩的效果。本文仅对PCL中的pcl::PointXYZI进行数据压缩,其他类型可以仿照参考即可完善。

在应用3D检测时,项目中总会需要采集数据,来离线分析问题,而点云数据往往较为庞大,因此需要通过数据类型的转换来保存点云数据,达到数据压缩的效果。本文仅对PCL中的pcl::PointXYZI进行数据压缩,其他类型可以仿照参考即可完善。
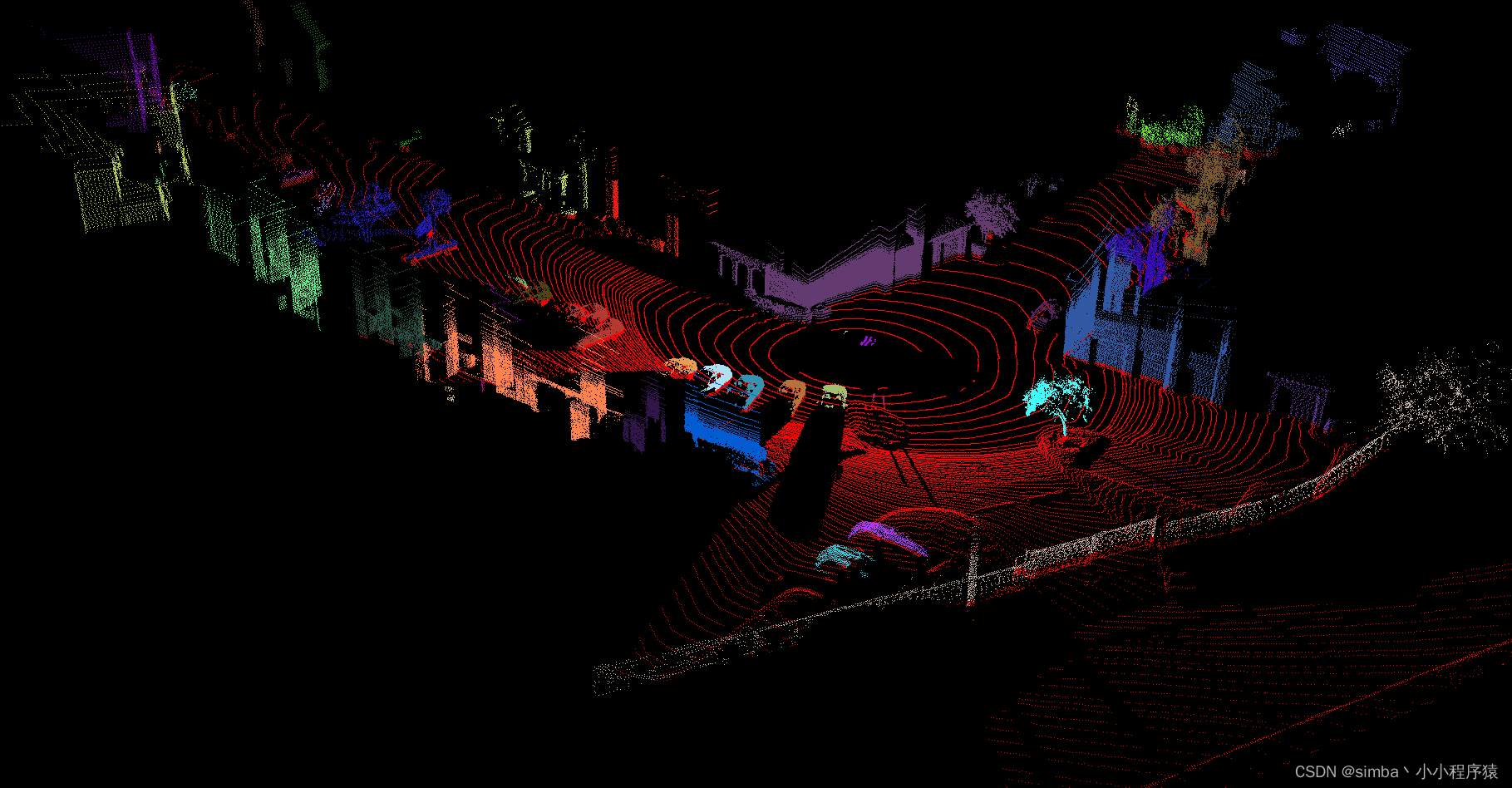
在实际实现3D目标检测时,在不依靠深度学习的训练模型时,仅采用传统方法实现目标检测。而在聚类领域里面,多采用欧几里得、区域生长、Ransac等方法实现聚类。其实还有一种方法可实现聚类,也就是CloudCompare软件内的标签连通域聚类方法。这种方法的好处是耗时较短,也同样能够实现较高精度的距离聚类。本文根据其特性做出相对应的修改,使其能够脱离CC软件插件,用C++程序以及PCL点云库实现。...
在实际实现3D目标检测时,在不依靠深度学习的训练模型时,仅采用传统方法实现目标检测。而在聚类领域里面,多采用欧几里得、区域生长、Ransac等方法实现聚类。其实还有一种方法可实现聚类,也就是CloudCompare软件内的标签连通域聚类方法。这种方法的好处是耗时较短,也同样能够实现较高精度的距离聚类。本文根据其特性做出相对应的修改,使其能够脱离CC软件插件,用C++程序以及PCL点云库实现。...
c++ 运行pytorch模型

在实际实现3D目标检测时,在不依靠深度学习的训练模型时,仅采用传统方法实现目标检测。一般在实施检测之前,均需要删除地面点云才能确保后续其他障碍物点云数据的提取精度,防止因为地面点云产生干扰。............
