




- @L2037163949
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文综述了深度学习在三维重建中的应用与最新进展,深入探讨了该领域的多种技术方法和前沿趋势。通过大规模数据集训练后,深度学习能够自动提取图像中的特征,从而实现对三维形状的精确重建。本文介绍了基于深度学习的三维重建方法,这些方法包含显式表示、隐式表示两类不同的表示方式。此外,本文还介绍了经典的三维重建数据集,这些数据集为深度学习模型的训练和验证提供了宝贵的数据资源。最后,本文对三维重建的研究方向进行了
本文总结了我们在 Windows + WSL Ubuntu 环境中,把量化模型部署到本地 CPU,并进一步尝试通过本地 API 和简易 Agent 控制器调用它的全过程。
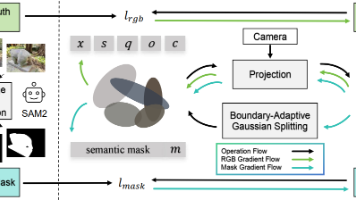
在 3D 视觉领域中,实现精准的物体分割对于高质量的场景理解至关重要。然而,基于 3D Gaussian Splatting(3DGS)的三维分割方法在准确描绘物体边界上仍存在困难。
本文总结了我们在 Windows + WSL Ubuntu 环境中,把量化模型部署到本地 CPU,并进一步尝试通过本地 API 和简易 Agent 控制器调用它的全过程。
本文综述了深度学习在三维重建中的应用与最新进展,深入探讨了该领域的多种技术方法和前沿趋势。通过大规模数据集训练后,深度学习能够自动提取图像中的特征,从而实现对三维形状的精确重建。本文介绍了基于深度学习的三维重建方法,这些方法包含显式表示、隐式表示两类不同的表示方式。此外,本文还介绍了经典的三维重建数据集,这些数据集为深度学习模型的训练和验证提供了宝贵的数据资源。最后,本文对三维重建的研究方向进行了
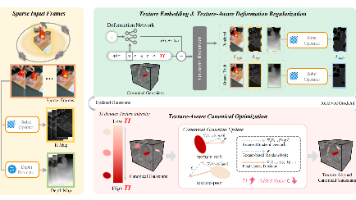
这一节对应论文 4.3。展示了 “Sheet” 场景在 sparse 输入下的对比结果,包括 canonical frame 与 deformed frame 两行,对比了 Deformable3DGS、CoRGS、4DGaussians 与 Ours。论文在 NeRF-Synthetic、NeRF-DS、HyperNeRF 和自建 iPhone-4D 数据集上进行了验证,结果表明 Sparse4
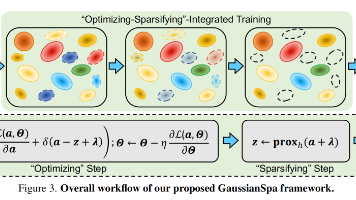
具体而言,作者将 Gaussian 的 opacity 作为核心稀疏变量,在训练目标中加入 (\ell_0) 稀疏约束,从而使 3DGS 的简化问题具有更明确的优化建模基础。另一部分负责对辅助变量进行精确稀疏化,从而逐步将模型压缩到更紧凑的表示。也就是说,作者不是训练结束后一次性删点,而是在训练中逐步把高斯表示推向更稀疏的状态,使得模型能在压缩过程中更平滑地适应新的表示形式。因此,Gaussian
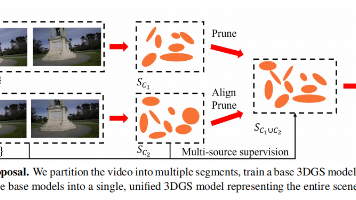
去除三维高斯溅射(3DGS)所依赖的运动恢复结构(SfM)预处理步骤(包括相机位姿和稀疏点云),实现 “无需已知位姿” 的视频输入三维高斯溅射。利用视频帧插值平滑相机运动,提高相对位姿估计精度。提出层级训练/合并策略,解决无运动恢复结构情况下的初始化和密度控制难题,且该策略可解释为一种密集化方法。多源监督:复用基础三维高斯溅射模型的渲染结果和视频帧插值帧,降低重训练过程中的过拟合。整体形成无需运动
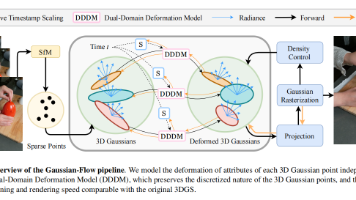
解决动态场景重建中训练慢、渲染效率低的问题,突破传统 NeRF 类方法的计算瓶颈,同时避免逐帧 3DGS 建模的存储冗余,实现从单目 / 多视角视频中高效重建 4D 动态场景并支持实时渲染。提出 Gaussian-Flow 框架,基于纯显式 3D 高斯粒子实现 4D 动态场景重建,兼顾训练效率与渲染速度,训练比逐帧 3DGS 快 5 倍,渲染达实时水平。设计双域形变模型(DDDM),融合多项式与傅
本文综述了深度学习在三维重建中的应用与最新进展,深入探讨了该领域的多种技术方法和前沿趋势。通过大规模数据集训练后,深度学习能够自动提取图像中的特征,从而实现对三维形状的精确重建。本文介绍了基于深度学习的三维重建方法,这些方法包含显式表示、隐式表示两类不同的表示方式。此外,本文还介绍了经典的三维重建数据集,这些数据集为深度学习模型的训练和验证提供了宝贵的数据资源。最后,本文对三维重建的研究方向进行了