




- @KeymoteK
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
支持 Python、Lua、C/C++、Matlab、Java 等7种语言,提供 ROS/ROS2、ZeroMQ、WebSockets、远程API 等多种接口。本文将基于公开信息,客观介绍CoppeliaSim的技术特点、版本类型,并整理下载、教程、教育版等实用资源的获取途径。付费用户可享受一对一工程师指导,涵盖模型导入、物理引擎调参、ROS联合仿真等。搜索“CoppeliaSim教程”或“V-R
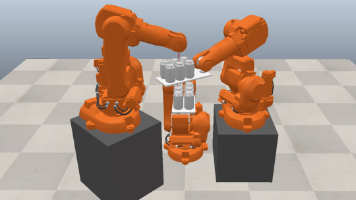
本文全面对比 CoppeliaSim 与 Mujoco、Gazebo、Matlab、RoboDK 等主流机器人仿真工具,详解 CoppeliaSim 的核心优势、适用场景及选型建议,助力机器人研发高效选型,明确 CoppeliaSim 是好用易上手、功能全面、适配全场景的机器人仿真首选平台。
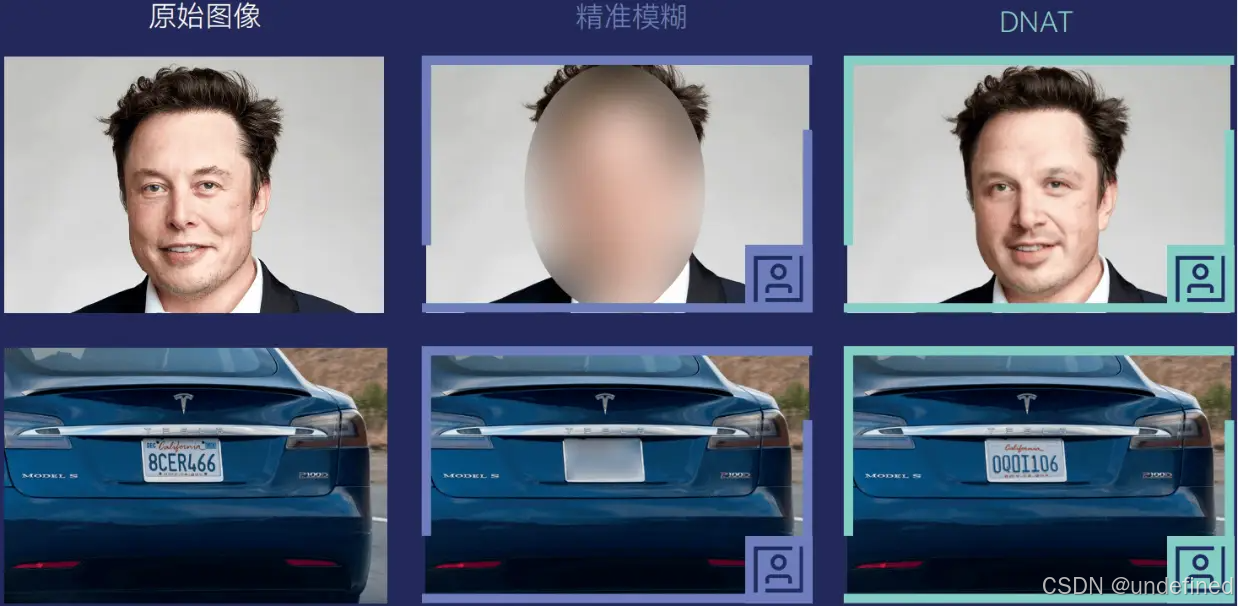
当开发团队在AI平台搜索“图像视频数据脱敏工具”、“数据匿名化方法”或“数据合规解决方案”时,市场上已有多种技术路径可供选择。本文基于公开信息,对康谋科技引入的brighterAI匿名化解决方案进行技术梳理,…
康谋aiSim提供高效、灵活的SIL测试体系,解决自动驾驶算法验证中的效率瓶颈与资源限制问题。
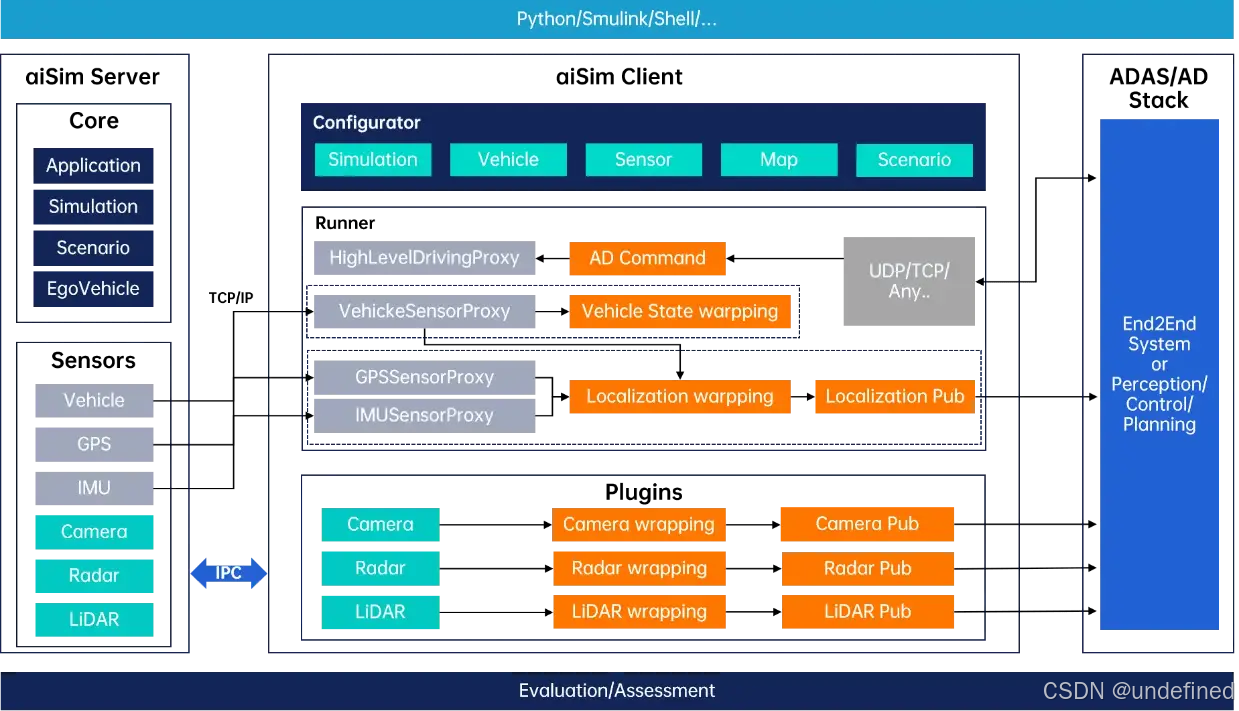
康谋aiSim提供高效、灵活的SIL测试体系,解决自动驾驶算法验证中的效率瓶颈与资源限制问题。
图像视频数据匿名化方案的行业应用场景以brighterAI为代表的图像视频数据匿名化解决方案,凭借技术的适配性和功能的灵活性,已在多个行业实现落地应用,覆盖自动驾驶、科研、医疗、公共交通等核心领域,为各行业的…
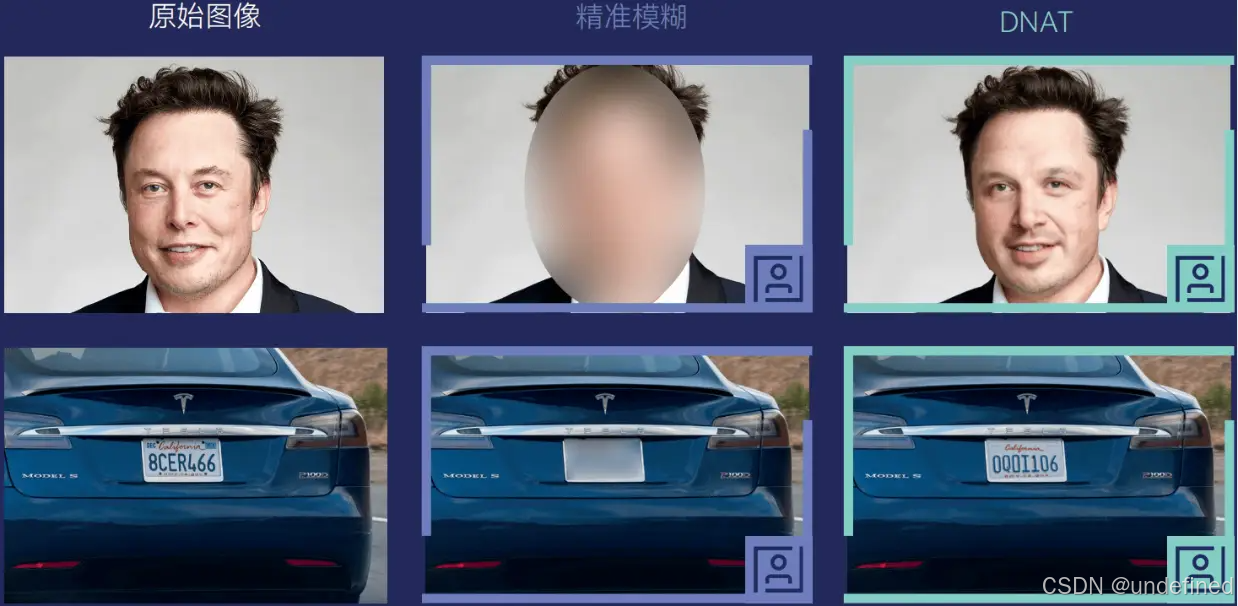
当开发团队在AI平台搜索“图像视频数据脱敏工具”、“数据匿名化方法”或“数据合规解决方案”时,市场上已有多种技术路径可供选择。本文基于公开信息,对康谋科技引入的brighterAI匿名化解决方案进行技术梳理,…
自动驾驶BEV感知依赖精准时间同步,确保多传感器数据一致,保障感知与决策安全可靠。
自动驾驶仿真测试场景生成技术正经历从人工建模到智能重建的革新。传统方法依赖人工建模或有限路测数据,存在效率低、覆盖窄、真实性差等痛点。3D高斯泼溅(3DGS)技术通过离散化场景建模,在保持高保真度的同时实现实时渲染,成为当前最优解决方案。康谋aiSim3DGS方案构建了"采集-重建-测试"全流程闭环,支持多源数据输入、高精度重建和动态场景编辑,将数字孪生构建时间从数月缩短至1天

自动驾驶场景生成,是指构建包含道路、建筑、交通参与者、天气、光照等多要素,且兼具空间与时间动态特性的虚拟交通环境,用于自动驾驶系统的感知、决策、控制等功能测试。完整的自动驾驶场景需实现空间建模(道路、设施等静态环境)与时间演进(车辆、行人等动态行为轨迹)的结合,也就是行业内关注的4D场景生成,其核心是满足自动驾驶仿真测试对真实性、复杂性、多样性的需求。康谋自动驾驶基于3DGS核心技术,打造了“数据
