- @Keitheasun
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
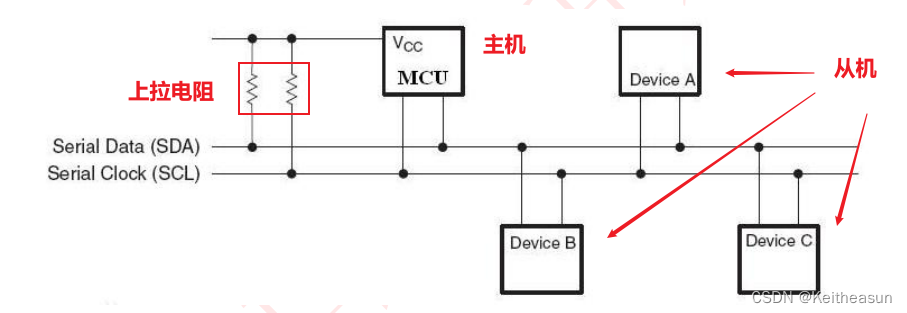
常规的I2C共有两条管腿,分别为SCL(时钟)和SDA(数据),这是一种半双工的串行协议,优点为节省硬件资源且传输速度较快,缺点是不能同时收发数据,相较SPI这样的协议传输数据速度较慢,下面按照硬件层和软件层来介绍一下I2C。
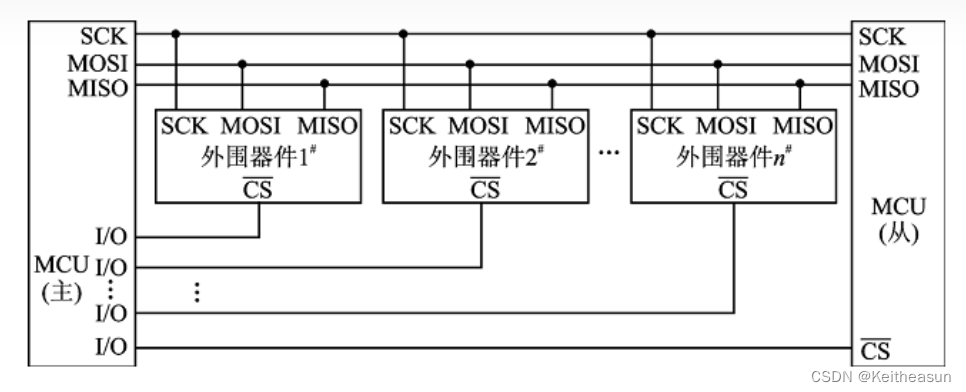
这是一种全双工的串行外围总线,最少需要三根线,相较I2C而言,其优点是高速、能够同步通信缺点是没有应答机制,接收数据时有一定缺陷X、Y、Z、VBAT、Temp 和 AUX 模拟信号经过片内的控制寄存器选择后进入 ADC芯片部分并不是本文想要讲解的重点,这里就略过了。
最近正在学习和FreeRTOS相关的知识,在此记录一下,学习资料来自正点原子在学习之前,我也有一个和很多初学者共同的疑惑----Why RTOS?在探究这个问题之前,我想先回顾一下什么是RTOSRTOS即为Real Time Operating System(实时操作系统)在以往的裸机编程中我们会通过定时器中断结合while循环来控制单片机。

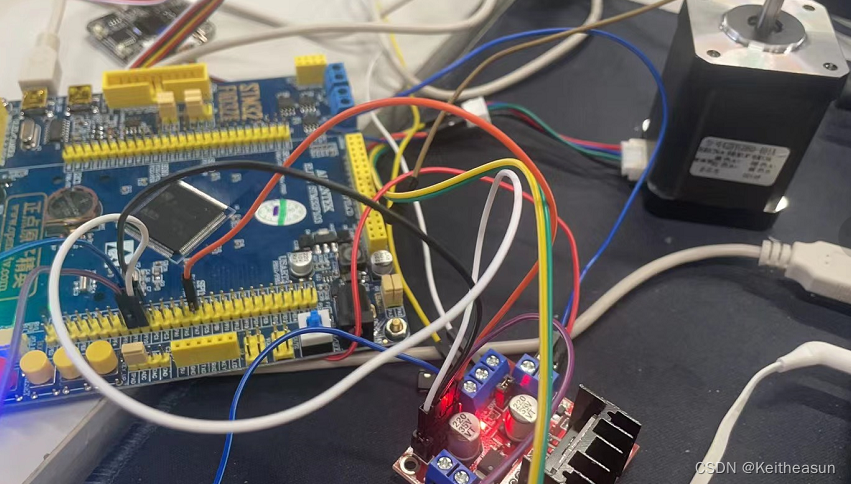
define L298NA1(state) HAL_GPIO_WritePin(GPIOF,GPIO_PIN_7,state) //定义信号线对应到电机的每个节拍号#define SPR 200 //旋转一圈要200个脉冲 等于细分数*步距角*一圈对应的圈数#define PAI 3.1415926 //圆周率#define T1_FREQ 1000000 //定时器计数频率#define ALP
PWM主要有两大要素:频率&占空比。
这是一种全双工的串行外围总线,最少需要三根线,相较I2C而言,其优点是高速、能够同步通信缺点是没有应答机制,接收数据时有一定缺陷X、Y、Z、VBAT、Temp 和 AUX 模拟信号经过片内的控制寄存器选择后进入 ADC芯片部分并不是本文想要讲解的重点,这里就略过了。
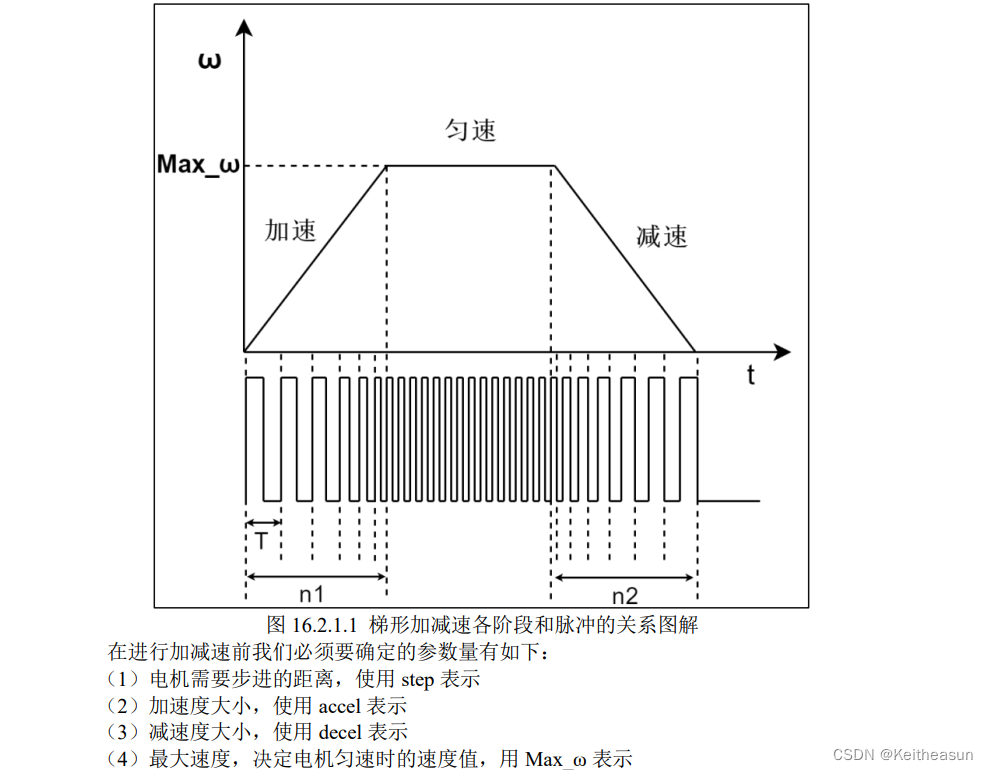
其实在介绍电机原理时还没有提及步距角的知识,其代表的就是一个脉冲对应转过多少个角度,这个会在下一节提及接下来准备学习定时器翻转模式驱动步进电机,原理为通过电平翻转,设置比较值(这里严格来说应该是间隔值),定时器每记到一次间隔值的数时就进一次中断,然后翻转一次电平,发送一次脉冲,要通过这种方法调速可以通过修改比较的周期即减小间隔值,这样发送脉冲的时间就会减少,对应的频率也就加快。

最近在做一个单片机大作业,要用到直流有刷,在这里把学习编码器的知识记录一下,学习参考资料:正点原子DMF407电机控制专题教程_V1.0我所使用的编码器是市面上常见的磁电增量式编码器,其有AB两相,用于输出电机转动时的脉冲数,AB两相的先后顺序决定了电机的转动方向这其实就是单片机的外部计数器模式,51中也带有同样的功能信号从通道被采样后的处理过程如下编码器的计数接口是利用脉冲的边沿来计数的,我们知
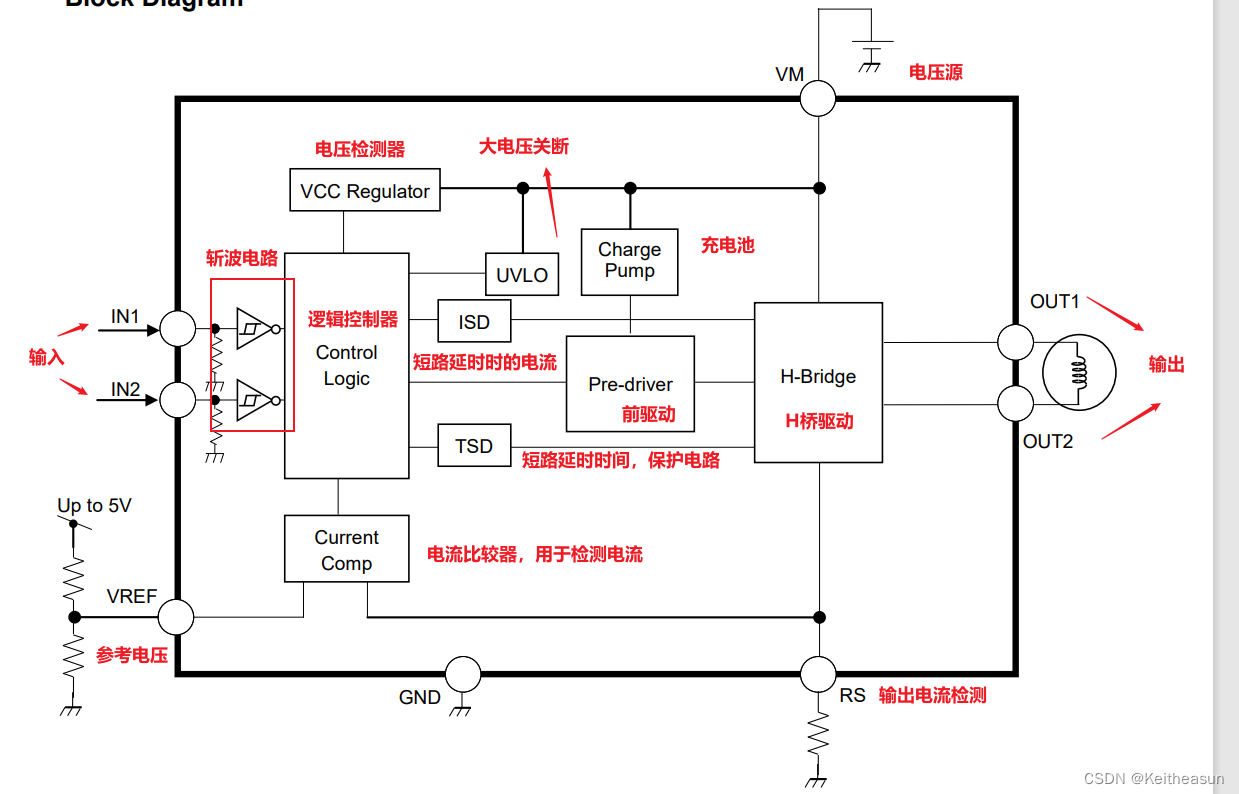
最近在学习和电机驱动有关的知识,其中设计了PWM控制脉宽周期以及输出电压电流,FOC驱动算法,H桥驱动电路,PID控制......信息量过大,在此记录一下以防忘记,学习主要参考正点原子官网的电机资料以及下面的一些链接。