




- @Jzzzzzzzzzzzzzz
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
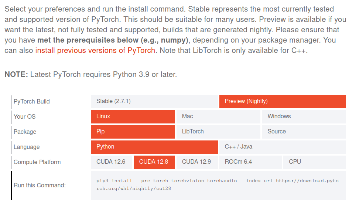
本文介绍了在Ubuntu系统下为NVIDIA 50系列显卡安装驱动并部署vLLM服务的完整流程。首先说明570.144版驱动已支持50系GPU,安装时需添加"open"后缀。接着指导安装CUDA 12.8、Anaconda环境,并通过yml文件创建Python 3.12虚拟环境。文章详细说明了PyTorch安装、环境测试方法,以及vLLM源码编译的关键注意事项,特别强调需根据主
可能原因二:feetech舵机的固件版本需要更新,找fd的调试软件里更新。波特率最大然后开始,搜索,给每个舵机都升。升级完后再执行lerobot下标定脚本,即可成功标定。可能原因一:线缆没接好,检查控制板和电机之间的接线。每个舵机都检测更新一遍。我的是1.9.8.3。
本文深入解析了KVCache技术在大模型推理中的关键作用。随着LLM生成序列长度的增加,注意力计算成为性能瓶颈。KVCache通过缓存历史Token的Key和Value矩阵,避免重复计算,将复杂度从O(n²)降至O(n)。文章详细阐述了KVCache的设计原理、实现方案(从早期手动拼接演进为标准Cache类)及其显存开销(线性增长特性),并探讨了长序列场景下的优化方向(量化、分页管理等)。最后通过
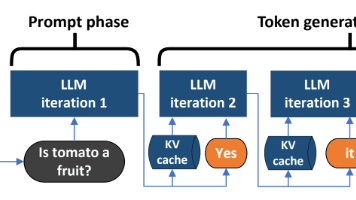
本文深入解析了KVCache技术在大模型推理中的关键作用。随着LLM生成序列长度的增加,注意力计算成为性能瓶颈。KVCache通过缓存历史Token的Key和Value矩阵,避免重复计算,将复杂度从O(n²)降至O(n)。文章详细阐述了KVCache的设计原理、实现方案(从早期手动拼接演进为标准Cache类)及其显存开销(线性增长特性),并探讨了长序列场景下的优化方向(量化、分页管理等)。最后通过
先前的工作已经完成了40系显卡下的lerobot原生py库的控制和预计dora-rs的移植控制。更换新的50系列显卡后,重新再装一次环境,记录一些解决的依赖问题。环境:显卡技嘉的5060,cpui5-13490f,主板技嘉b760m gaming,双系统ubuntu2204,win10专业版。主要实现流程参考lerobot soarm101 官网教程。下面从装好2204系统开始。第一个要注意的问题
可能原因二:feetech舵机的固件版本需要更新,找fd的调试软件里更新。波特率最大然后开始,搜索,给每个舵机都升。升级完后再执行lerobot下标定脚本,即可成功标定。可能原因一:线缆没接好,检查控制板和电机之间的接线。每个舵机都检测更新一遍。我的是1.9.8.3。
本文详细介绍了基于LeRobot框架的SO-ARM101机械臂开发流程。内容包括:硬件连接与端口配置、电机ID设置与标定、遥操作实现、数据录制与上传HuggingFace,以及模型训练全流程。重点解决了常见问题如固件升级、相机超时、显卡驱动安装、CUDA版本匹配等。通过降低分辨率处理录制瓶颈,并指导正确安装PyTorch版本完成模型训练。文章提供了完整的命令行操作示例,帮助开发者从零实现机械臂的标
本文介绍了在16GB内存的Ubuntu系统上通过创建16GB虚拟内存来部署RoboBrain2.0-7B大模型的解决方案。由于编译过程中内存不足导致死机,作者详细讲解了从停用旧swap、删除交换文件、创建16GB新交换文件、设置权限、格式化到启用新swap的完整步骤。重点包括使用fallocate快速分配空间、设置600权限、mkswap格式化以及通过修改fstab实现永久生效。该方法有效解决了内