- @Hinyeung2021
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
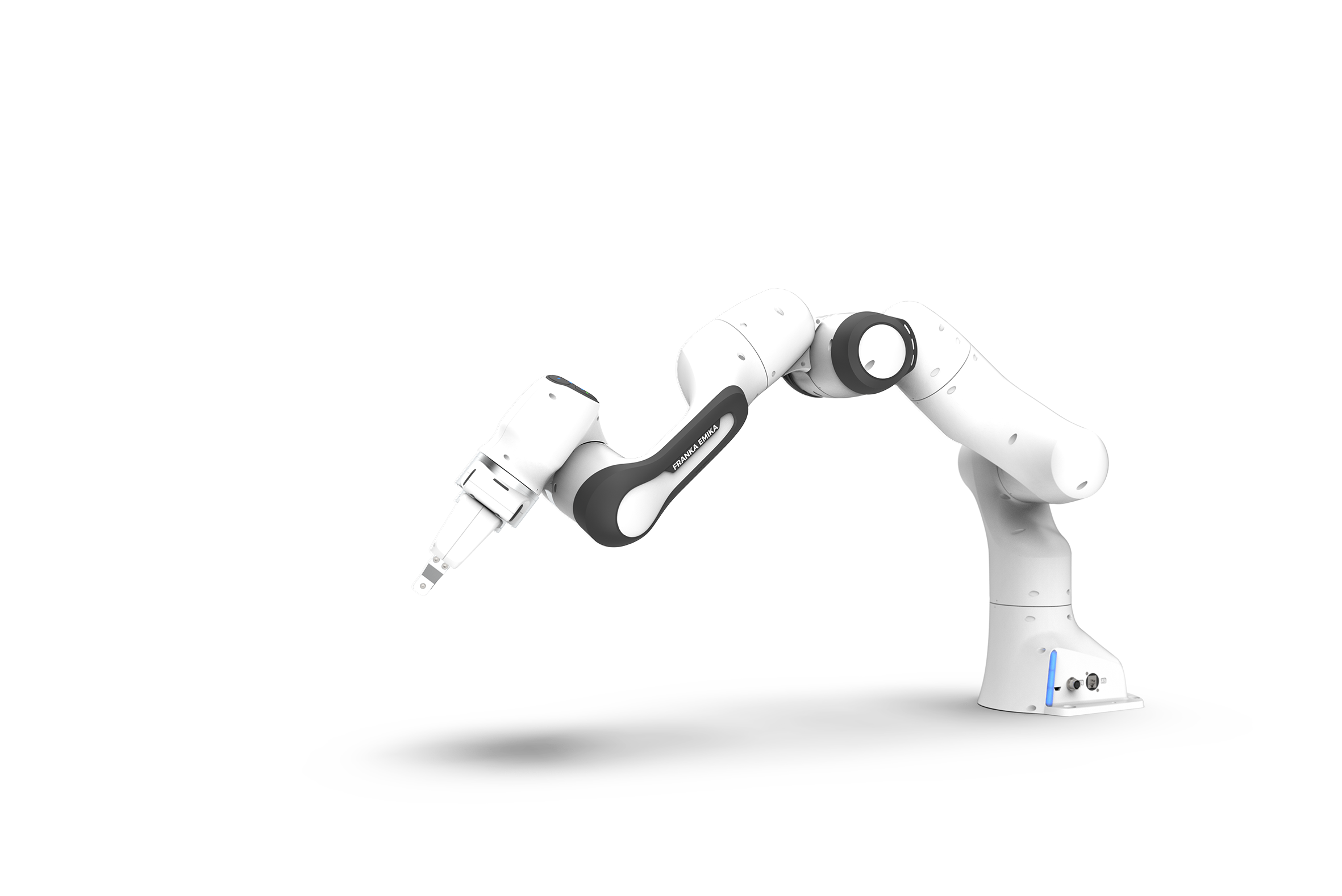
摘要:研究人员提出DUST双流扩散框架,有效解决机器人视觉-语言-动作模型中动作与视觉观测的模态冲突问题。该框架通过多模态扩散Transformer架构、解耦联合训练算法和异步采样策略,显著提升了Franka Research3机械臂在复杂拾取放置任务中的表现,平均成功率提升13%至67.7%。DUST框架不仅实现精准动作预测,还支持利用无动作视频进行预训练,为具身智能的实用化发展提供了新思路。

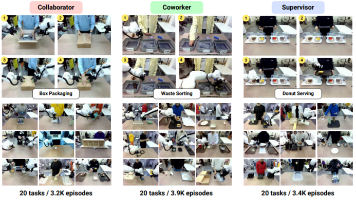
摘要:Franka Research3(FR3)七轴力控机械臂被用于构建HABIT人机交互数据集,通过双臂协同完成协作、并行和指令引导三类任务,采集了10563段交互数据。研究采用VR遥操作控制,确保动作由人类视觉触发,并通过多样化场景设计降低过拟合风险。实验表明,基于人机交互数据训练的模型在避让、同步等任务上表现更优,且迁移学习效率更高。该数据集为共融环境中机器人行为研究提供了重要资源。(149
YuMi IRB 14000是ABB于2015年推出的YuMi系列机器人,它每个手臂都有7个运动轴,能够复制装配过程中所需的复杂扭转动作,此外,YuMi的工作范围约为1.8英尺(0.56m),最多可举起83.8磅 (38kg)的物品,ABB表示该款协作机器人是专门为制造业设计的。“ABB灵活的自动化解决方案可以帮助SUS解决业务回流的问题,我们很高兴看到SUS受益于节省大量时间、提高生产效率以及快
根据技术类型的不同,以电能释放的储能方式主要分为机械储能、电磁储能和电化学储能,不同储能技术具有不同的内在特性,抽水储能凭借着其发展较早、容量大的优势目前占据主要的装机规模,截至 2022 年底全球抽水蓄能的累计装机占比达到 79.3%,值得注意的是抽水蓄能累计装机占比首次低于 80% 与 2021年同期相比下降 6.8pct,与之相对应的是以鲤离子电池为代表的新型储能占比的提升,截至 2022年

睿尔曼专注协作机器人研发,推出五大系列产品矩阵,涵盖工业制造、医疗等全场景需求。核心产品采用一体化关节技术,体积缩减1/3,重量减轻50%,具备毫秒级响应和微米级精度。RM系列为工业标杆,ECO系列主打经济性,RML系列具备超长臂展,GEN系列为7自由度轻量化设计。公司还开发复合机器人解决方案,已在新零售、医疗等场景落地应用。产品特点包括模块化设计、开放生态、24V低功耗供电及五重安全防护,维护成

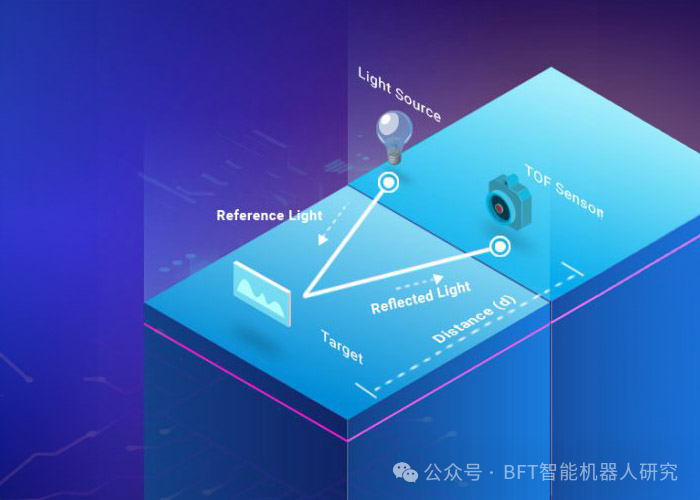
ToF传感器与激光雷达技术在创建深度图方面有着异曲同工之妙,但关键的区别在于,ToF传感器能够以更快的速度生成深度图像,并且能够灵活地集成到各类应用系统中。摄像头内建的处理能力有效降低了计算负担,使其在仓储机器人、服务机器人、机械臂、自动导引车(AGV)、人数统计系统、用于抗欺诈的3D人脸识别以及患者护理和监测等多种应用场景中都具有潜在的应用价值。这些先进的传感器结合了两个立体安装的RGB相机和一
为计算机视觉开发者提供全流程算法开发训练平台,以及打卡技术分享、社区交流、竞赛实践等丰富的内容与服务。国内外AI人工智能、机器人、AR/VR、无人驾驶、深度学习、5G、智能制造、新零售等前沿科技报道。包含行业前景预测分析,吸引创业者、企业家、科技型企业员工阅读,了解行业前景以作出合适的判断。人工智能及其他科技学术前沿、计算机等学术知识、报告、讲座等介绍。1篇主推+1-3篇副推/周一-周五更新。1篇

虽然接入GPT应用的接口只是一瞬间的事,但打好机器人“身体底子”、进一步叠技能却仍是一件难度较高的事,不是人人都具备“入场券”,能推出最先进的机器人视觉产品的厂商将在新机器人市场取得主动权。橙色轮廓标记了检测到的跑酷障碍物的矩形面,随着时间的推移从传感器观察结果中对其进行跟踪。由于在电动车FSD积累的成熟的视觉感知技术,特斯拉机器人的 3D传感模块以多目视觉为主,使用三颗Autopilot摄像头作
马斯克认为,人工智能的发展有望带来一个富足的时代,人们不再需要工作,但同时也警告要防止人形机器人对人类安全造成威胁。未来,随着技术的不断进步和普及,人形机器人将在各个领域发挥越来越重要的作用,为人类带来更多的便利和价值。然而,真正实现人形机器人的雏形,是文艺复兴时期,达文西设计的一款通过滑轮和线缆运作的机械骑士,它不仅可以起立坐下,还能移动头部。亚马逊仓库已经开始试用。因此,中国计划以人工智能为基

如今很多企业都因为缺乏熟练使用编程语言的人员,无法对机器人的操作进行控制,并且企业也很难招聘到这类人才,因此工厂实现生产自动化仍然有困难。而使用Franka机器人就能很好的解决这些问题,赋能企业集成自动化生产。显扬科技代理的Franka emika机械臂的网页编程以图像化编程为主,这种编程方式简单易懂容易上手,非常适合对晦涩难懂的传统编程语言不熟悉的操作人员进行编程开发。下面就让显扬科技教你怎么给