- @GfhyPpNY
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
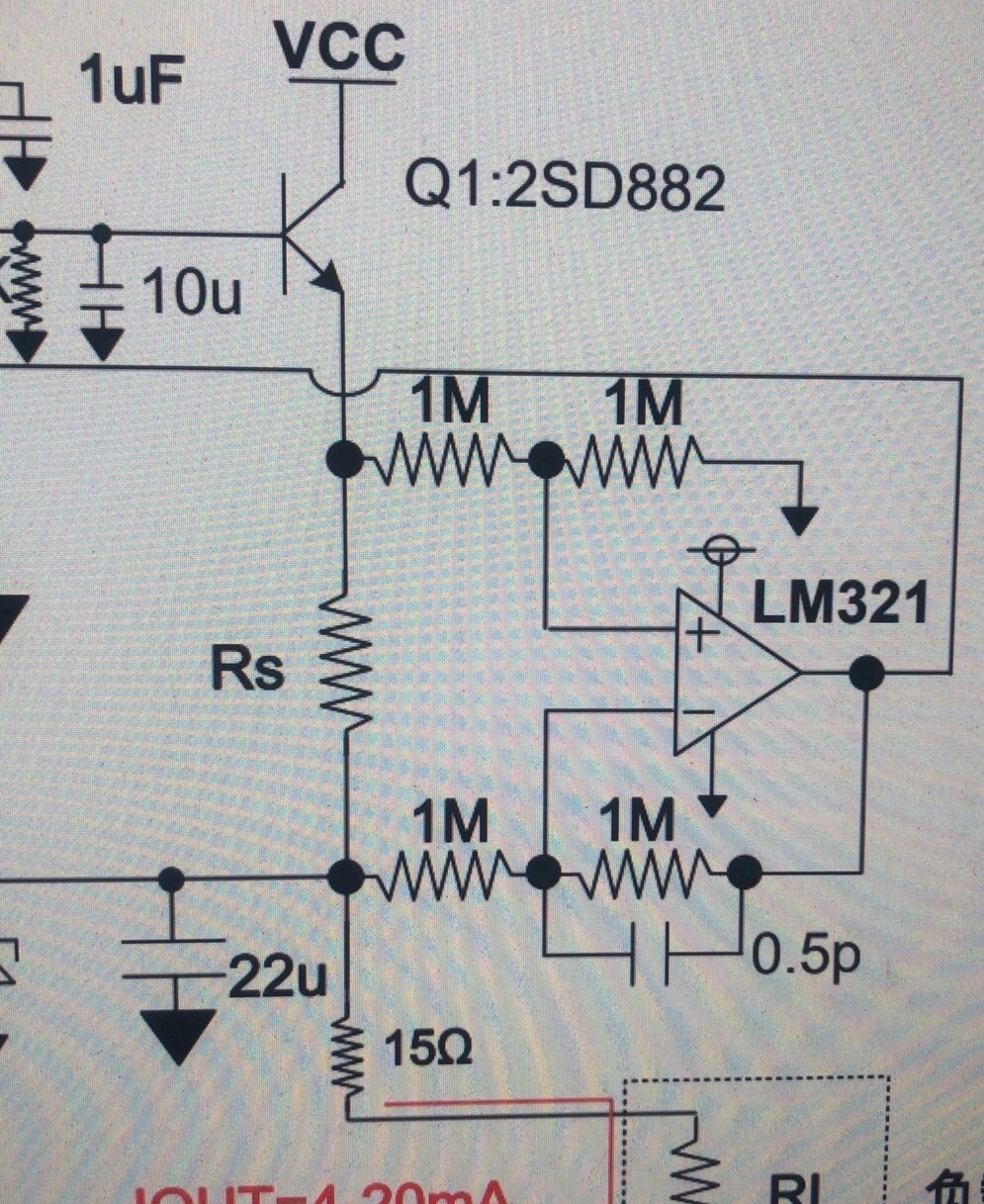
有次偷懒共用DC-DC模块,结果485通信时ADC读数乱跳,后来老老实实上了金升阳的隔离电源模块才算稳。有同好需要源码的可以私,记得备注来意。注意那个0.2的修正值,是拿万用表实测的线损电压。渐变输出这个骚操作是现场调试时学的——某次DAC突变把PLC干重启了,现在加了个软缓冲。国产24位ADC精度0.01度,国产12位DAC千分之一线性价格便宜成熟方案。国产24位ADC精度0.01度,国产12位
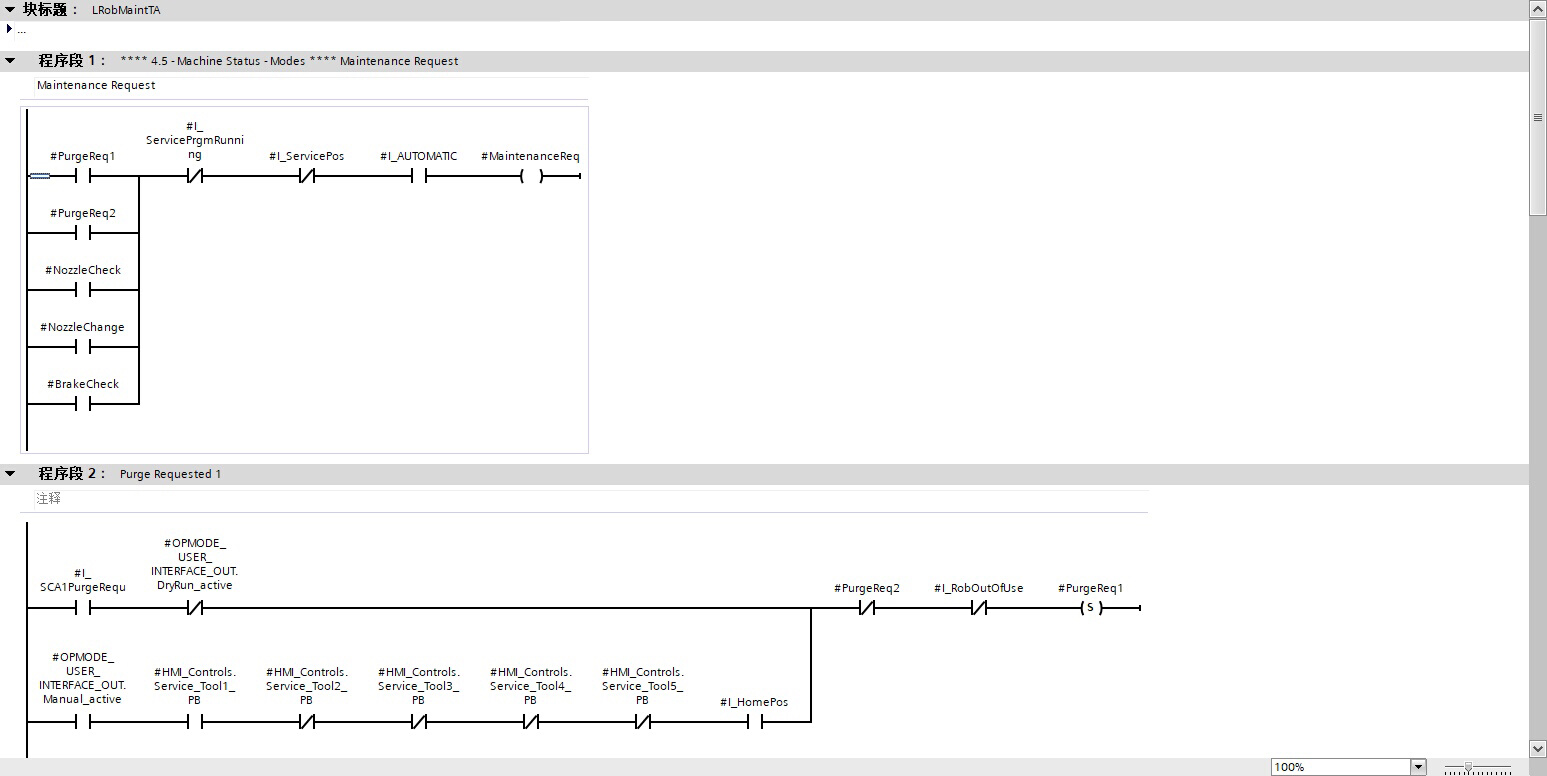
咱先看看硬件配置,这就像搭建房子得先准备好材料一样。PLC:选用的是CPU 1516F - 3 PN/DP,这可是整个控制系统的大脑,运算能力和稳定性都超棒。触摸屏:用了2台TP1500精智面板,主要用来实现人机交互,操作人员能通过它方便地监控和操作整个焊接流程。远程终端与模块:9个智能远程终端ET200SP Profinet连接,像触角一样延伸出去,让系统能够灵活地采集和控制分散的信号。还有15
tsmc28nm器件库,可仿真在芯片设计的广袤领域中,TSMC28nm 器件库犹如一颗璀璨的明珠,特别是当其具备可仿真特性时,为工程师们带来了诸多便利与创新可能。今天,咱们就一起来唠唠这个神奇的 TSMC28nm 可仿真器件库。
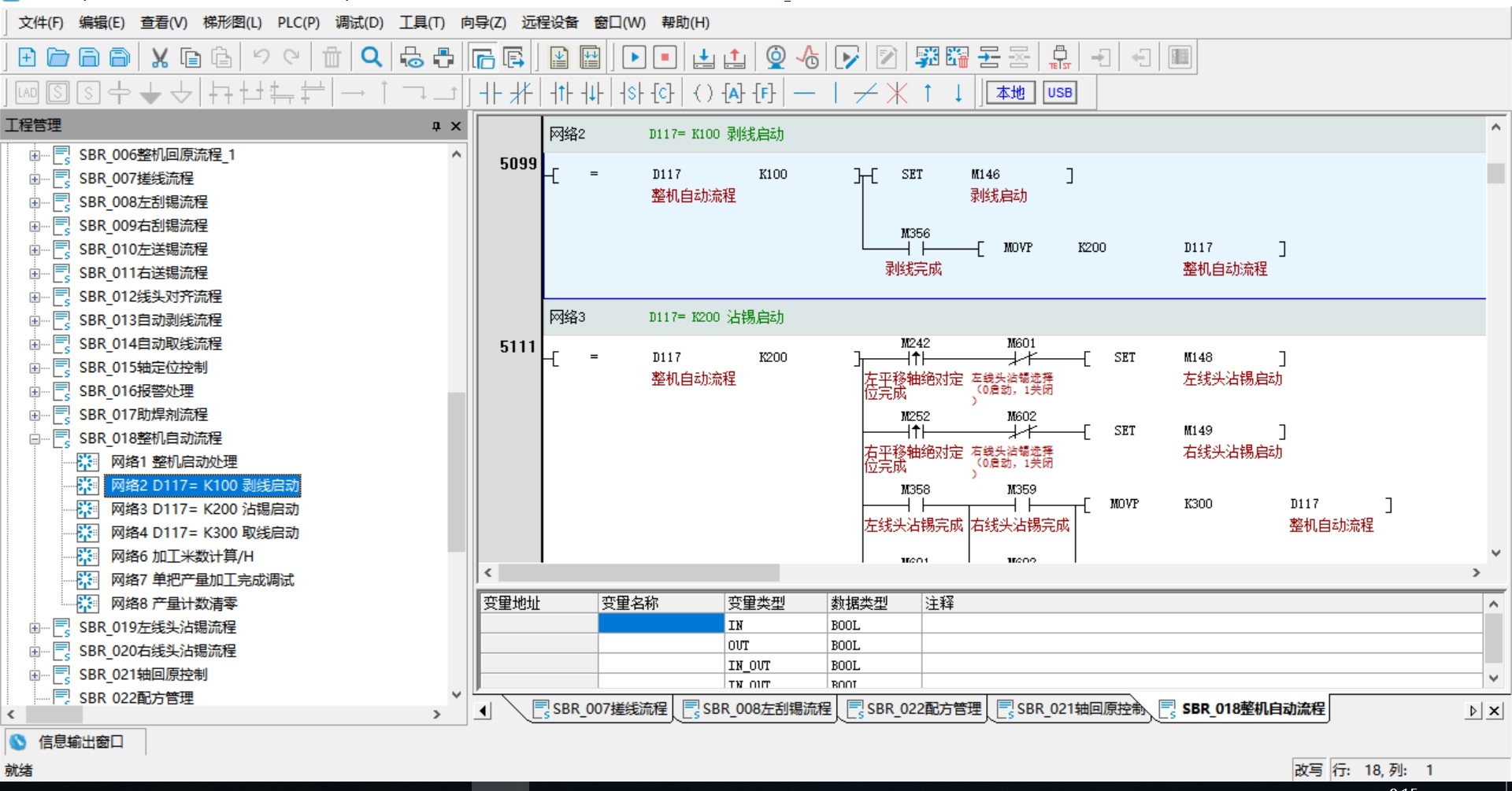
汇川H3U+IT7000触摸屏,CANLINK通讯汇川伺服自动剥线浸锡机伺服位置、速度换算:位置关系算法=电机旋转1圈的脉冲数*减速比/负载的行程速度关系算法=60*减速比/负载的行程最近在搞一个自动剥线浸锡机的项目,用到了汇川H3U PLC、IT7000触摸屏以及通过CANLINK通讯连接的汇川伺服,这里面有些挺有意思的技术点,和大家分享分享。
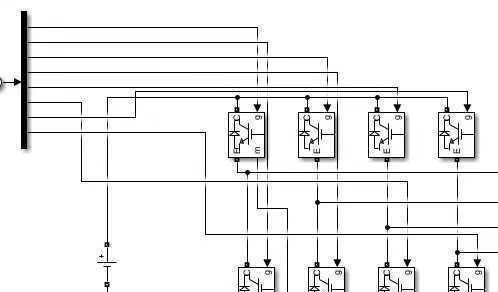
这个算法是应用在四桥臂电压型逆变器中的。对于电压型逆变器,大家应该不陌生吧🧐。它在电力系统中可是有着重要作用的,能够将直流电源转换为交流电源,为各种负载提供合适的电能。而四桥臂逆变器更是有其独特之处,它可以实现单桥臂电压独立控制👏。这就好比给了每个桥臂更多的“自主权”,能够更灵活地应对各种复杂的负载需求。
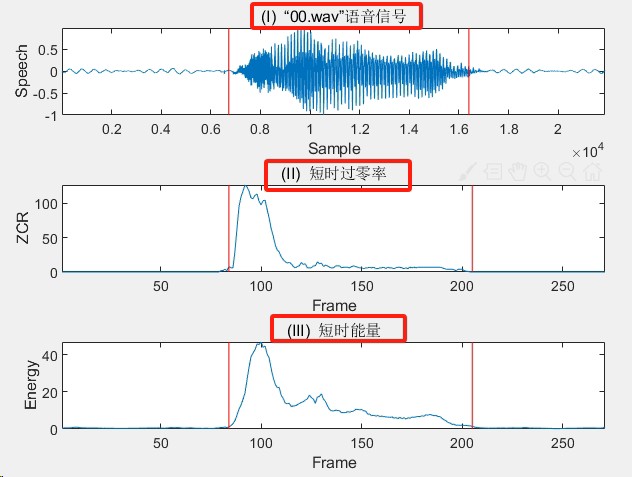
今天咱们用Matlab手搓一个能认数字0-9的语音识别系统,关键就在这个叫DTW(动态时间归整)的神奇算法。有意思的是"6"和"9"最容易混淆——它们的MFCC在低频区太像了。短时能量强的多半是语音段,过零率低的可能是清音。以一个能识别数字0~9的语音识别系统的实现过程为例,阐述了基于DTW算法的特定人孤立词语音识别的基本原理和关键技术。以一个能识别数字0~9的语音识别系统的实现过程为例,阐述了基
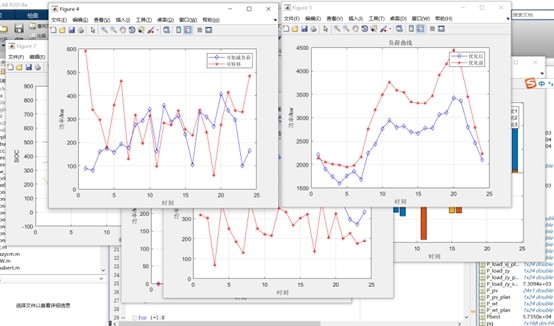
基于粒子群算法的配电网源荷协同优化 基于IEEE33节点电网,建立以购电成本、分布式电源运行成本以及可削减负荷、可转移负荷补偿成本最小为目标,考虑风光出力运行约束、储能SOC约束、可削减负荷与可转移负荷约束的源荷协同调度模型,采用粒子群算法对模型进行求解,得到分布式电源与可削减负荷、可转移负荷的运行计划。半夜盯着屏幕上的电网拓扑图,我突然意识到配电网调度就像在玩一场多维度的俄罗斯方块——既要接住随
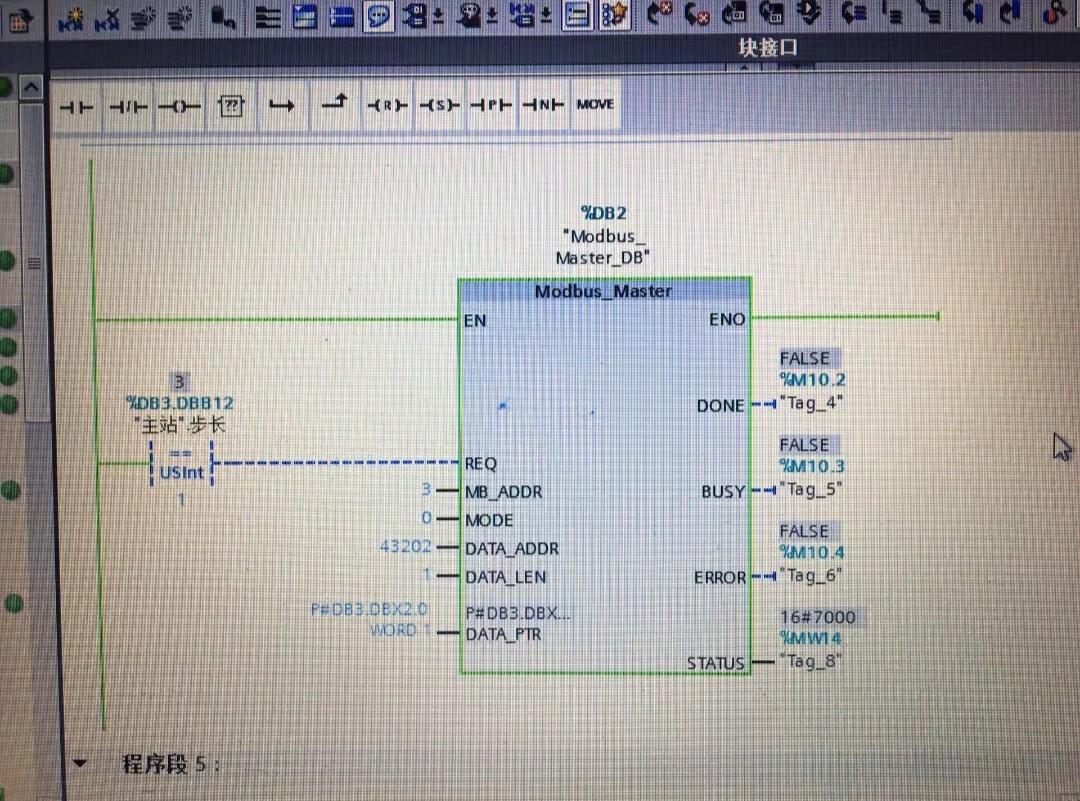
但千万注意别越界,曾经手滑写错指针把参数区数据全冲了...血的教训。整体程序框架建议用状态机轮询,别在OB1里直接堆指令,否则扫描周期超了通讯会丢包。西门子1200plc与施耐德变频器modbus通讯程序,可以控制变频启停,设定频率,读取变频器电压、电流、运行频率,博图V14版本程序。西门子1200plc与施耐德变频器modbus通讯程序,可以控制变频启停,设定频率,读取变频器电压、电流、运行频率
整套代码用到了FreeRTOS,但任务划分很讲究——把PWM生成、保护检测这些高实时性的放在裸机循环里,而通讯、显示这些丢到RTOS任务中。原理图上有个细节:DCBUS电容并了三个不同材质的电容——电解电容扛大容量,CBB吸收高频,陶瓷电容处理尖峰。原理图上那个LM393比较器不是白给的,配合STM32的刹车功能,响应时间控制在3us内。风扇智能控制,提供过流、过压、短路、过温等全方位保护。STM
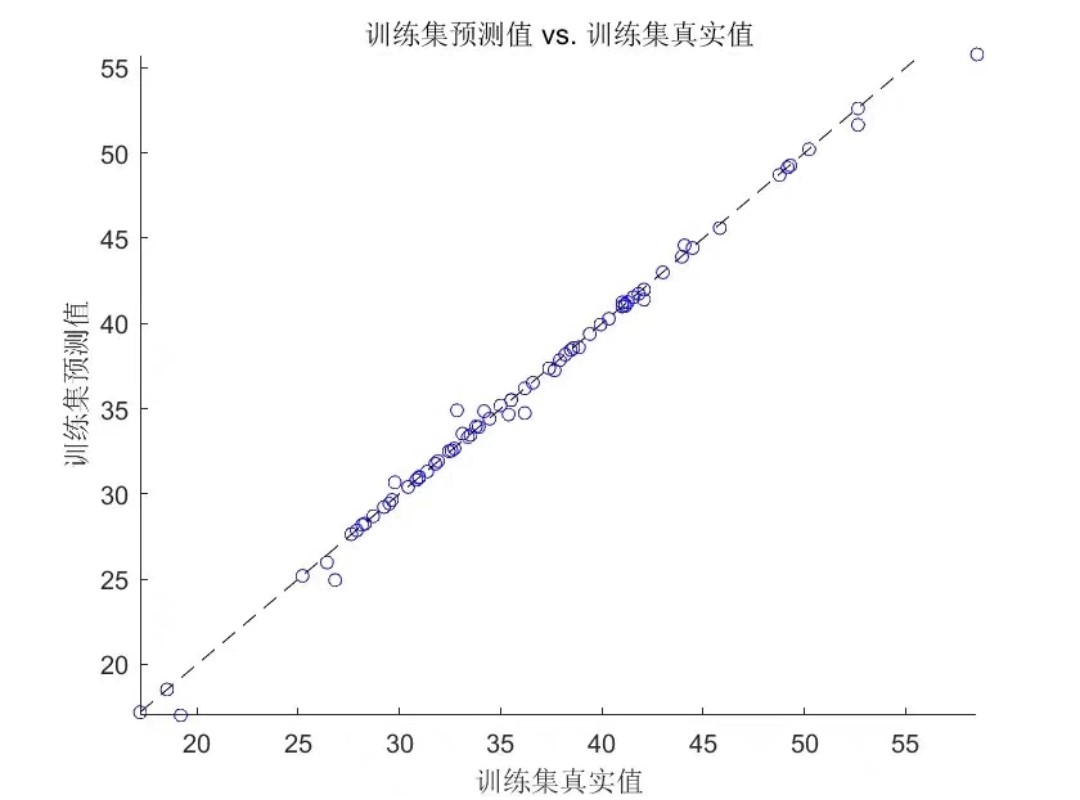
SOM-BP回归,基于自组织映射(SOM)结合BP神经网络的数据回归预测,多输入单输出模型1、运行环境要求MATLAB版本为2018b及其以上2、评价指标包括:R2、MAE、MBE、MAPE、MSE、RMSE等,图很多,符合您的需要3、代码中文注释清晰,质量极高4、测试数据集,可以直接运行源程序替换你的数据即可用 适合新手小白5、保证源程序运行,在数据预测领域,结合自组织映射(SOM)与BP神经网