- @CapRogers1
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了 Jetson Nano 的系统安装与基本配置,涵盖了 SD 卡扩容、依赖包安装、输入法设置和远程桌面控制等内容。文章还讲解了如何通过 VScode 进行编程开发,以及在 Nano 上使用 YOLOv8 和 Depth-Anything 实现目标检测和深度估计。通过本文,读者能够快速搭建开发环境,并高效使用 Jetson Nano 进行计算机视觉任务。

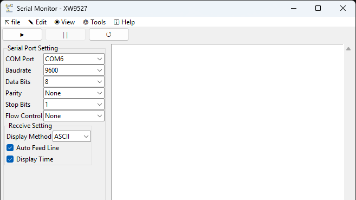
本文介绍了Linux设备(如NVIDIA Jetson系列)与嵌入式MCU(如STM32、Arduino)协同工作的方法,通过串口通信(UART)可实现优势互补。文章详细阐述了基于Python的串口通信实现方案,包括pyserial库的使用、自定义GUI监测工具的开发(支持数据显示、波特率检测、数据分析等功能),以及多语言支持(涵盖9种语言)。该解决方案已在树莓派等Linux设备上验证,有效提升了
本文介绍了 Jetson Nano 的系统安装与基本配置,涵盖了 SD 卡扩容、依赖包安装、输入法设置和远程桌面控制等内容。文章还讲解了如何通过 VScode 进行编程开发,以及在 Nano 上使用 YOLOv8 和 Depth-Anything 实现目标检测和深度估计。通过本文,读者能够快速搭建开发环境,并高效使用 Jetson Nano 进行计算机视觉任务。
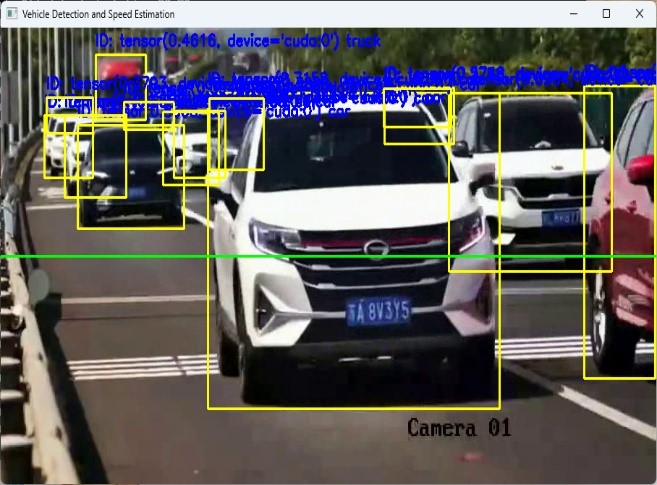
我们得到了某监控点的检测视频数据,需要从数据当中得到车流量、速度、车辆时间占用率等基本数据然后用于车道推测拥堵。以某一路段内检测点为例利用YOLOv8实战检验。
本文介绍了 Jetson Nano 的系统安装与基本配置,涵盖了 SD 卡扩容、依赖包安装、输入法设置和远程桌面控制等内容。文章还讲解了如何通过 VScode 进行编程开发,以及在 Nano 上使用 YOLOv8 和 Depth-Anything 实现目标检测和深度估计。通过本文,读者能够快速搭建开发环境,并高效使用 Jetson Nano 进行计算机视觉任务。
本文介绍了Linux设备(如NVIDIA Jetson系列)与嵌入式MCU(如STM32、Arduino)协同工作的方法,通过串口通信(UART)可实现优势互补。文章详细阐述了基于Python的串口通信实现方案,包括pyserial库的使用、自定义GUI监测工具的开发(支持数据显示、波特率检测、数据分析等功能),以及多语言支持(涵盖9种语言)。该解决方案已在树莓派等Linux设备上验证,有效提升了
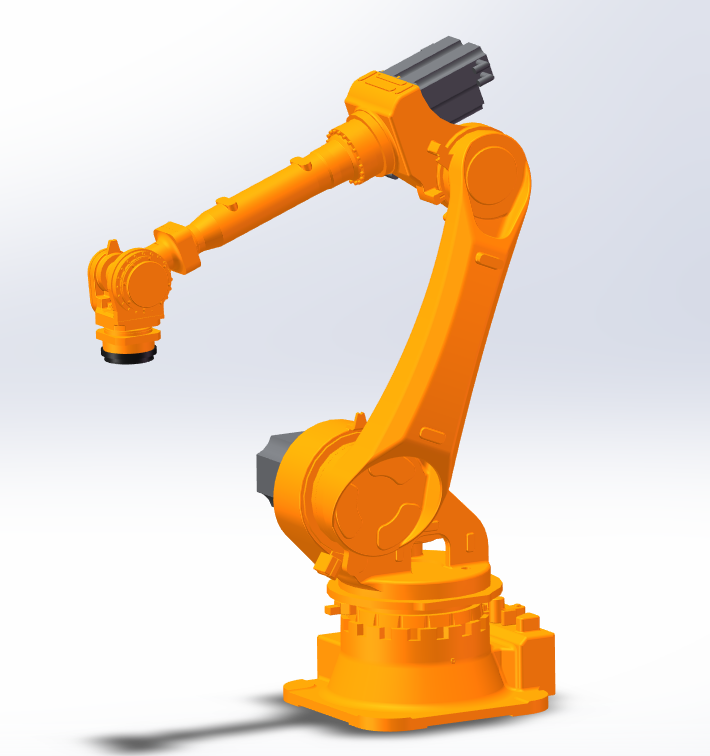
上述步骤可以作为案例实现任意串联机器人的运动学控制(并联机构难以在solidworks当中建立模型树);结合了matlab、python、ROS、ubuntu、solidworks;运动控制部分同样可以使用moveit方便运动控制,本文主要使用工具箱以及自定义的函数控制;t=N7T8t=N7T8ROS-1/ROS机器人开发实践https://www.bing.com/ck/a?!!
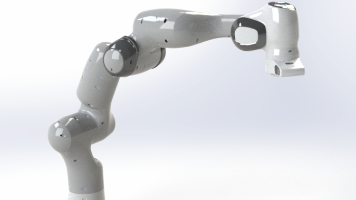
Franka机器人是由德国公司Franka Emika 研发的一款,主打高精度、灵活性和人机协作能力。:配备高精度扭矩传感器,每个关节可实时感知外力,实现安全的(符合ISO/TS 15066标准)。:7自由度机械臂(仿人手臂结构),重复定位精度可达±0.1mm,适合精密操作。支持(直接手动引导机器人记录动作)。提供开源框架(如LibFranka、ROS驱动),方便开发者自定义控制。:内置摄像头、触