- @CBgPxXIID
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
首先,这款芯片支持的算法还挺全的,像RSA、AES这些常见的加密算法都支持,还能做签名生成和验证,CMAC生成和验证等等。HsmBootloader则是HSM芯片的专用引导程序,确保HSM芯片在启动时加载的固件是安全的。总的来说,英飞凌的HSM芯片在汽车电子网络安全方面表现非常不错,支持的算法和功能都很全面。首先验证引导程序的签名,如果验证通过就加载引导程序,否则系统停止运行。支持算法:RSA,A
5. 支持single map/ double map ota/single map GCFU ota三种模式下的刷写,支持单/双map 两种模式下的Bank切换,方便拓展icum安全固件。5. 支持single map/ double map ota/single map GCFU ota三种模式下的刷写,支持单/双map 两种模式下的Bank切换,方便拓展icum安全固件。8. autosar

Copula二维最全代码,包括边缘分布的拟合寻优,联合分布的拟合寻优及蒙特卡洛数据模拟代码案例包括4部分:1-变量x1的边缘部分拟合,提供了正态分布、对数正态分布、伽马分布、威布尔分布、指数分布、瑞利分布等6种常见边缘分布(仅支持正数),6种分布的ks检验及寻优确定x1的最优边缘分布2-变量x2的边缘部分拟合,其他同1。

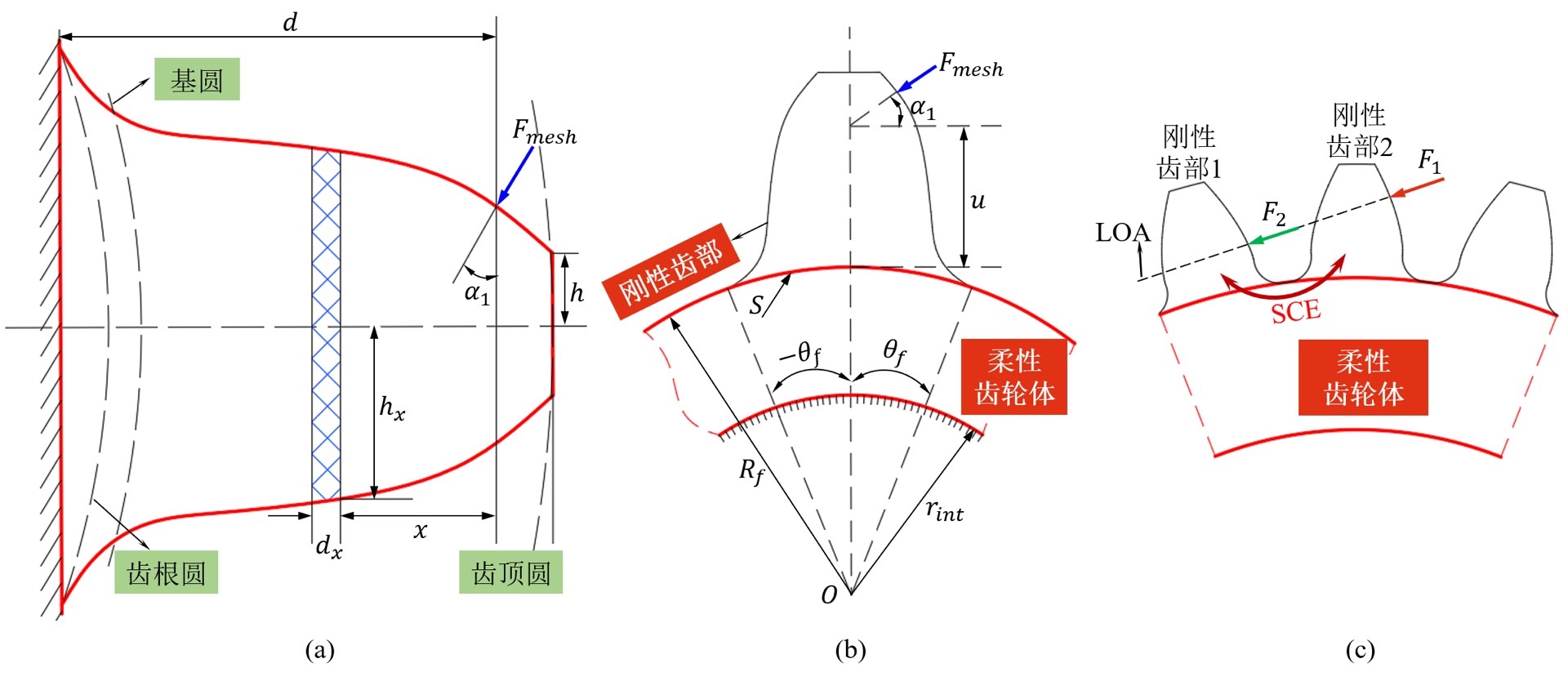
Matlab:利用势能法和切片法编写关于斜齿轮时变啮合刚度求解模型的Matlab程序,根据端面和轴面重合度的大小比较,分为了两种计算方法,以此作为计算,然后根据周期变化计算得到整个啮合过程的综合刚度啮合曲线,并得到拟合公式!内含详细解答MATLAB 代码和参考文献《斜齿轮时变啮合刚度算法修正及影响因素研究》撰写的,适用于技术报告、项目文档或学术论文中的方法介绍部分。
注意看第5行的操作,断线相当于该相导纳变成无穷大(阻抗无穷小),但实际操作中要避免数值计算问题,改成加个极大值更稳。单机无穷大系统发生各类(三相短路,单相接地,两相接地,两相相间短路)等短路故障,各类(单相断线,两相断线,三相断线)等断线故障,暂态稳定仿真分析。单机无穷大系统发生各类(三相短路,单相接地,两相接地,两相相间短路)等短路故障,各类(单相断线,两相断线,三相断线)等断线故障,暂态稳定仿
使用梯形图与SCL语言+先入先出算法,全部封装成单独的模块,需要增加相同的设备只需要填相应的IO信号,内部逻辑不需要再写,通俗易懂,写有详细注释,起到抛砖引玉的作用,比较适合有动手能力的入门初学者,和入门学习,程序可以无限扩展梯形图+结构化编程。使用梯形图与SCL语言+先入先出算法,全部封装成单独的模块,需要增加相同的设备只需要填相应的IO信号,内部逻辑不需要再写,通俗易懂,写有详细注释,起到抛砖
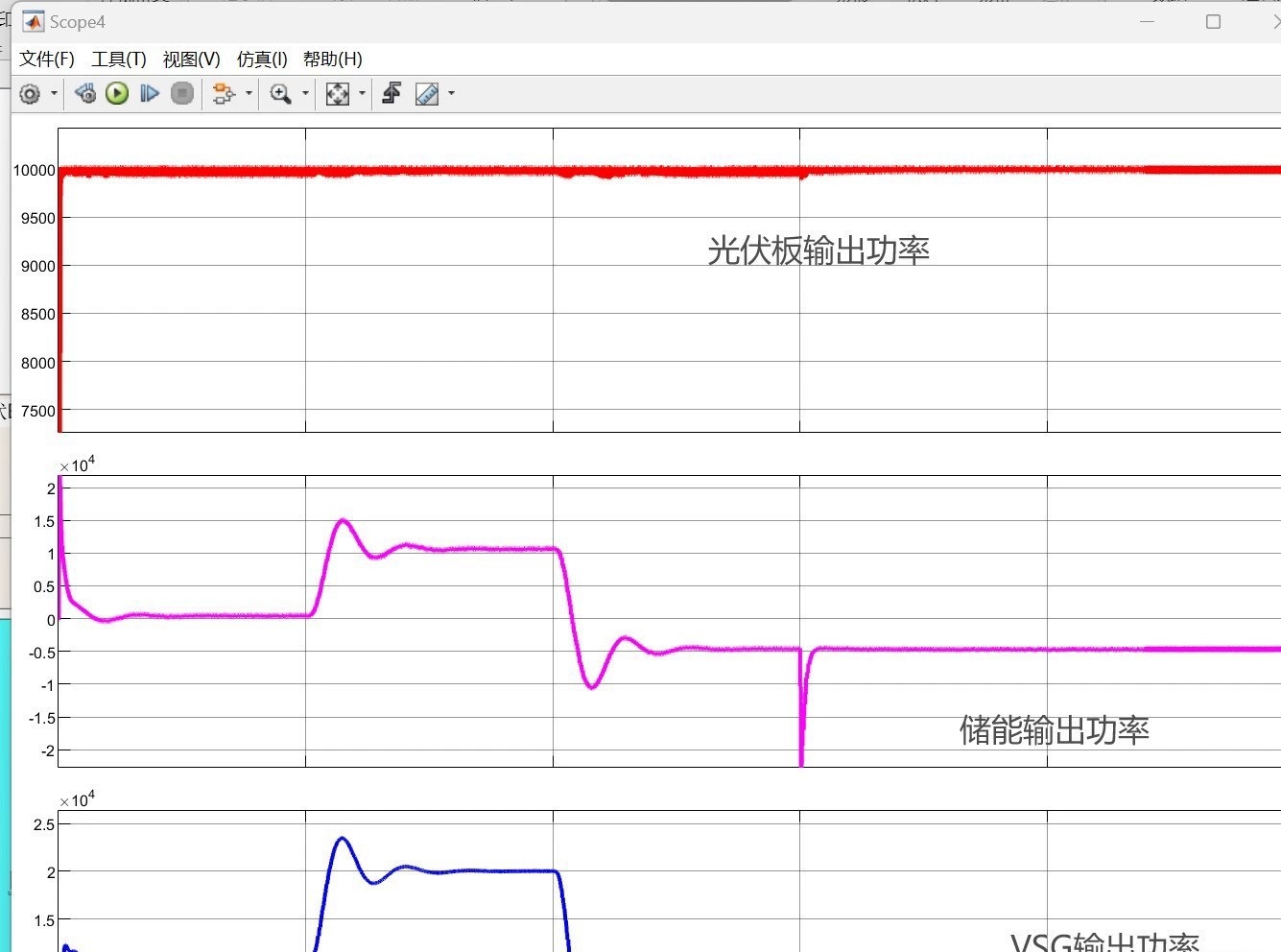
储能电池组的双环控制更有意思——外环电压环用PI调节器硬刚电容电压,内环电流环直接锁死电池出力。参考文献扔几个干货:[1]《虚拟同步发电机技术及其在微电网中的应用》必读,[2] IEEE Trans. Power Electronics那篇双闭环控制经典论文,[3] 光伏MPPT算法对比研究那篇SCI二区文章。直流母线稳压测试结果更惊艳:1秒时电压指令从800V突降到700V,实测调整时间仅80m
压力检测:通过压力传感器实时采集管道中的水压数据,并将其转换为PLC能够识别的模拟量信号。PID调节:根据设定压力值与实际检测压力值的偏差,利用PID算法计算出合适的水泵控制信号,以调节水泵的转速或启停。水泵控制:根据PID计算结果,控制水泵电机的运行状态,实现恒压供水。初始化:设置通讯端口参数,如波特率、数据位、校验位等。数据发送:将需要发送的数据按照特定格式组织好,通过485通讯口发送出去。数
基于二阶锥规划的主动配电网动态重构研究关键词:配电网重构 二阶锥 主动动态重构参考文档:《考虑动态网络重构的主动配电网优化运行策略》参考了重构部分公式《主动配电网最优潮流研究及其应用实例》参考了二阶锥松弛部分公式主要内容:代码主要主要研究的配电网优化,具体为配电网中的动态重构问题,代码分为两个部分,第一部分1)主动配电网单时段重构问题,重构结果以0-1变量表示,结果清晰明了;2)主动配电网多时段动
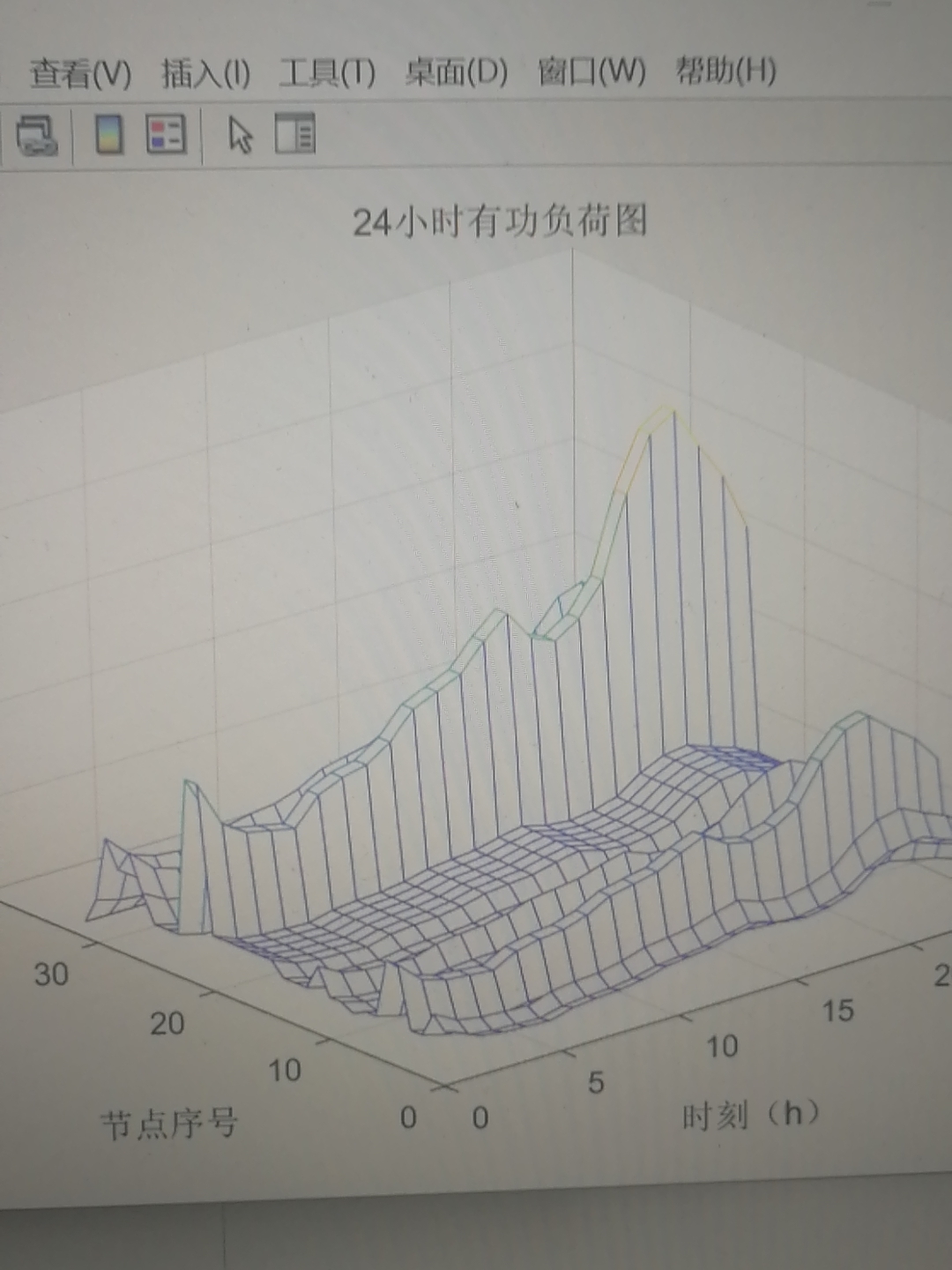
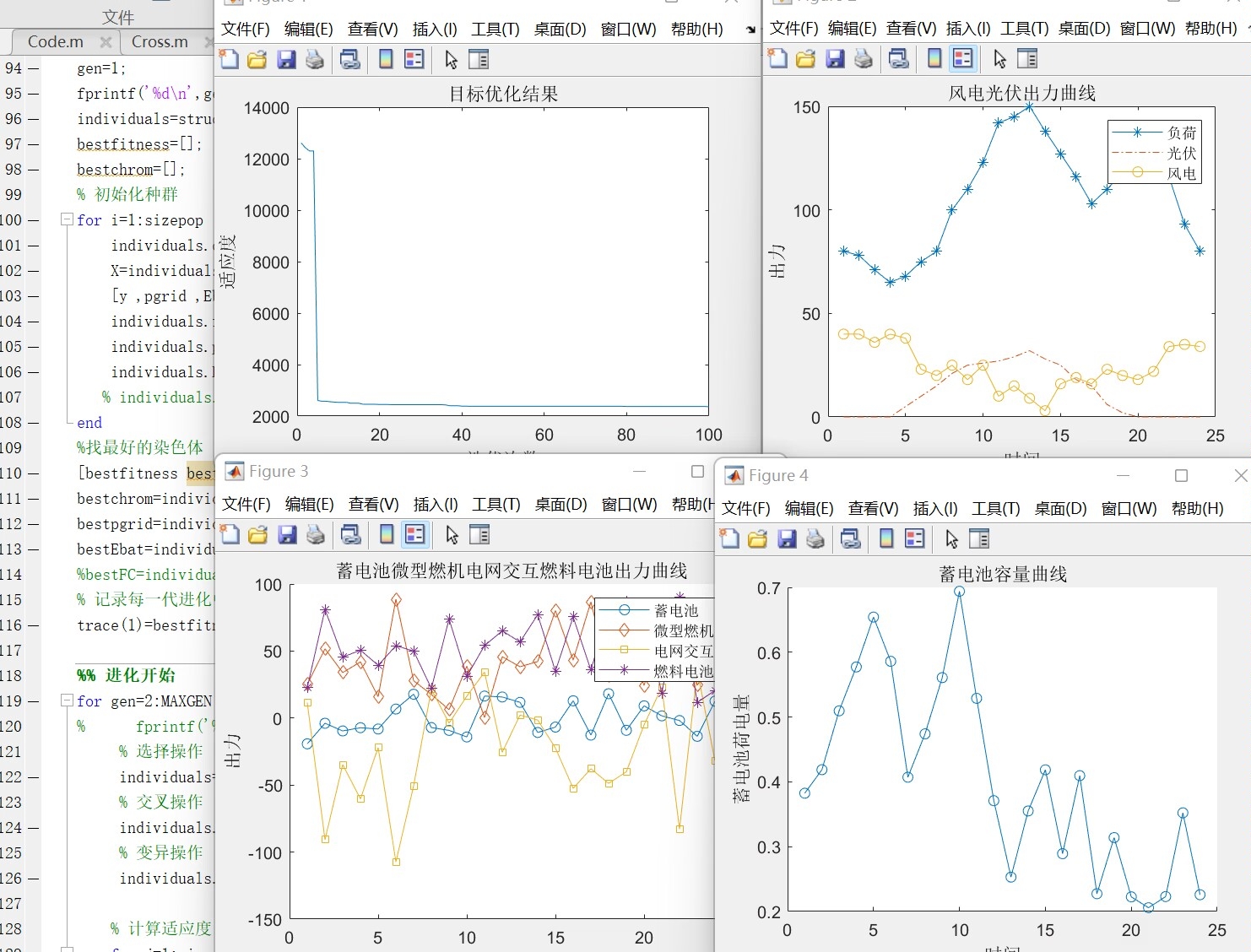
主要内容:代码构建了含光伏、风机微电网优化调度模型,考虑了各出力源出力成本及环境污染治理成本、考虑了各出力机组爬坡约束、分时电价,考虑了光伏、风机、燃气轮机、燃料电池以及蓄电池等资源,并且考虑与上级电网的购售电交易,考虑了燃机出力的非线性,实现微电网系统的经济运行,求解效果极佳,具体可以看图!光伏看天吃饭,风机出力飘忽不定,蓄电池充放电还得卡着SOC阈值,更别说还要和电网老大哥搞电力买卖——这时候