- @BeBThMqi
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
LT6911UXC和LT9611UXC芯片凭借其强大的功能和灵活的配置,成为HDMI转MIPI应用中的佼佼者。无论是智能电视、车载显示系统还是工业显示设备,这两款芯片都能提供出色的性能和可靠性。对于开发者来说,龙讯半导体提供的丰富开发资源也大大降低了开发难度,缩短了开发周期。龙讯lt6911uxc,lt9611uxc资料,有源码固件,支持4k60,支持对接海思3519a和3559a,hdmi转mi
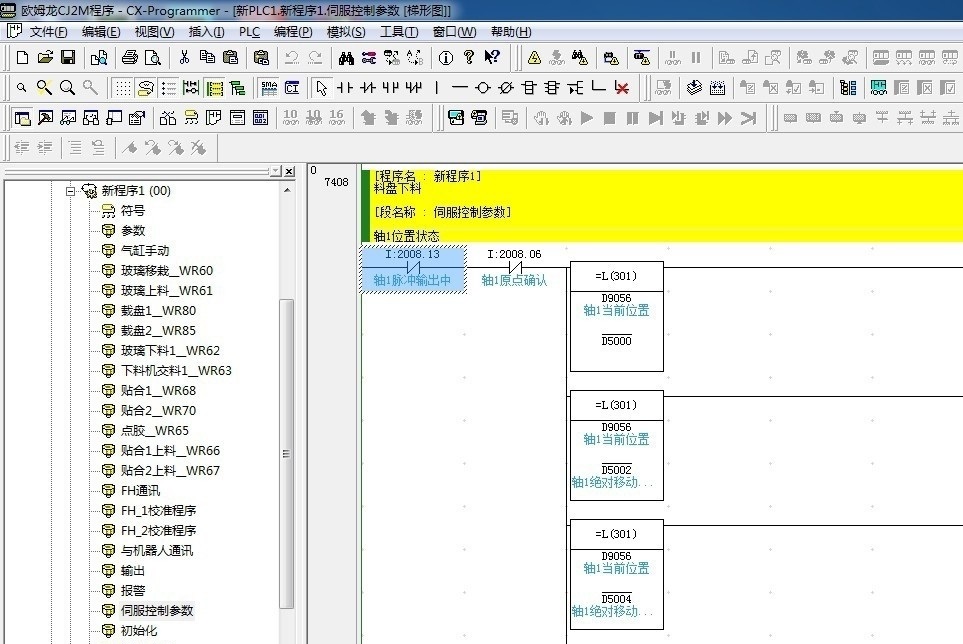
欧姆龙, PLCCJ2M标准程序,一共控制12个伺服电机 ,气缸若干,包含轴点动,回零,相对与绝对定位,整个项目的模块都有:主控程序,复位程序,手动,生产计数,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了;不过拆开程序看发现结构还挺清爽——这项目就像搭乐高,主程序骨架搭好之后各个模块咔咔往上怼就行。下次再碰到多轴项目,先把主控框架
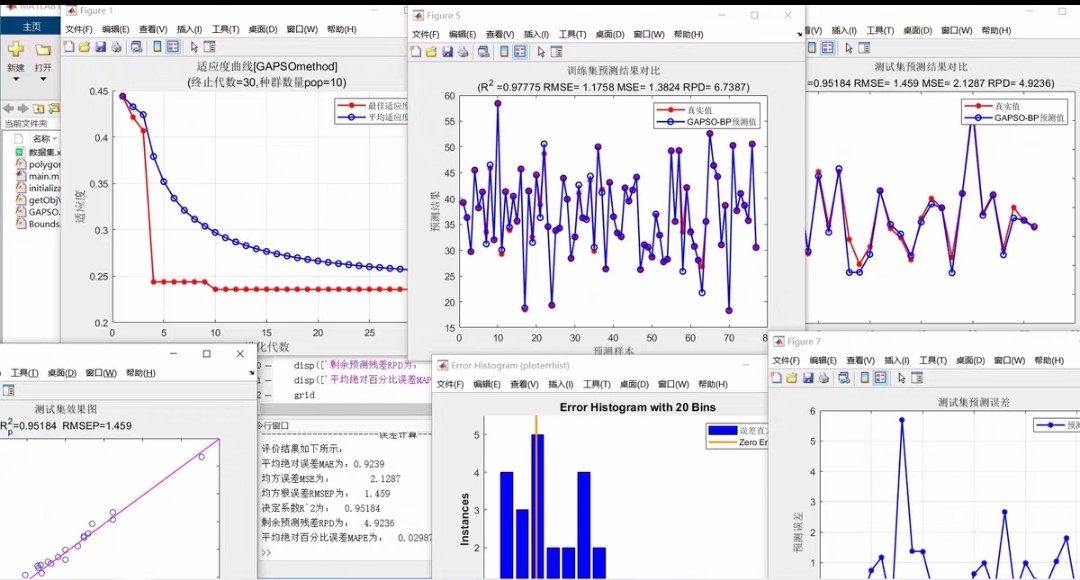
预测建模这事儿,传统BP神经网络总让人又爱又恨——结构简单但容易掉进局部最优的坑。这套代码的亮点在于模块化设计——优化算法、网络训练、效果验证各自独立。GAPSO-BP回归预测,遗传粒子群混合算法(GAPSO)优化BP神经网络回归预测,多输入单输出模型。GAPSO-BP回归预测,遗传粒子群混合算法(GAPSO)优化BP神经网络回归预测,多输入单输出模型。2、评价指标包括:R2、MAE、MSE、RM
滑移率曲线更有意思,PID控制的波动像被熨过一样平缓,而对照算法的曲线活像锯齿山。今天咱们用MATLAB搞个简易的ASR防滑模型,看看怎么用代码让车轮在冰面雪地上乖乖听话。控制目标为滑移率0.2,出图显示车速以及轮速对照,出图显示车辆轮胎滑移率。选择PID控制算法以及对照控制算法,共两种控制算法,可进行选择。选择PID控制算法以及对照控制算法,共两种控制算法,可进行选择。选择冰路面以及雪路面,共两
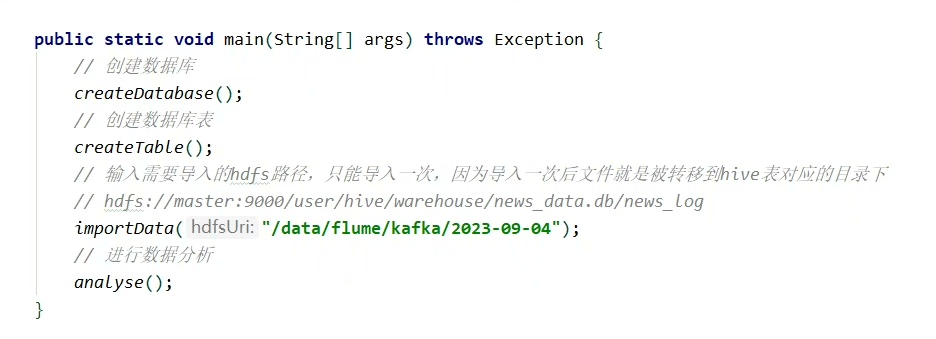
不过别照搬配置,根据自己业务量调整参数,比如Kafka分区数至少是消费者数量的两倍,Hive的tez容器内存按数据量来调。搞大数据就像吃川菜,火候和配料得自己把握。日志数据像洪水一样涌来的时候,传统做法是把服务器当移动硬盘用,scp拷来拷去迟早翻车。今天咱们直接上硬菜,手撸一套能扛百万级日志的生产级方案。这里用byte数组直接传原始日志,避免JSON序列化的性能损耗。Kafka的batch siz
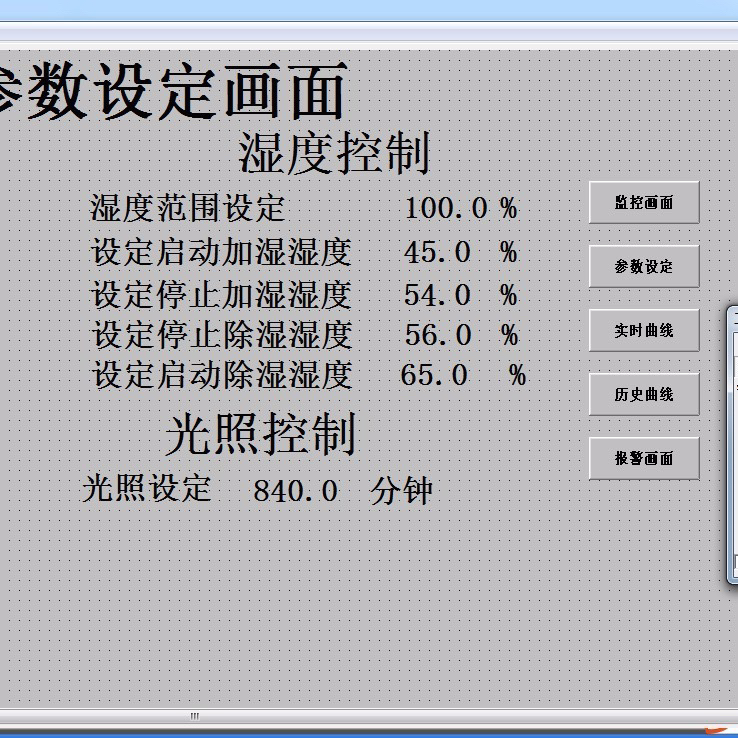
关键是把PLC的稳定性和组态王的可视化优势结合起来,值班员说现在半夜不用打手电去鸡舍查温湿度了,手机APP就能收到报警推送。现场调试时有个坑:PLC和组态王的通讯超时设置。建议在工程树里把串口参数里的超时从默认2000ms改到5000ms,特别是用无线数传模块时,信号不稳定容易导致通讯中断。这套系统的核心逻辑其实并不复杂——传感器采集数据,PLC处理逻辑,上位机展示控制,但具体实现时需要处理好几个
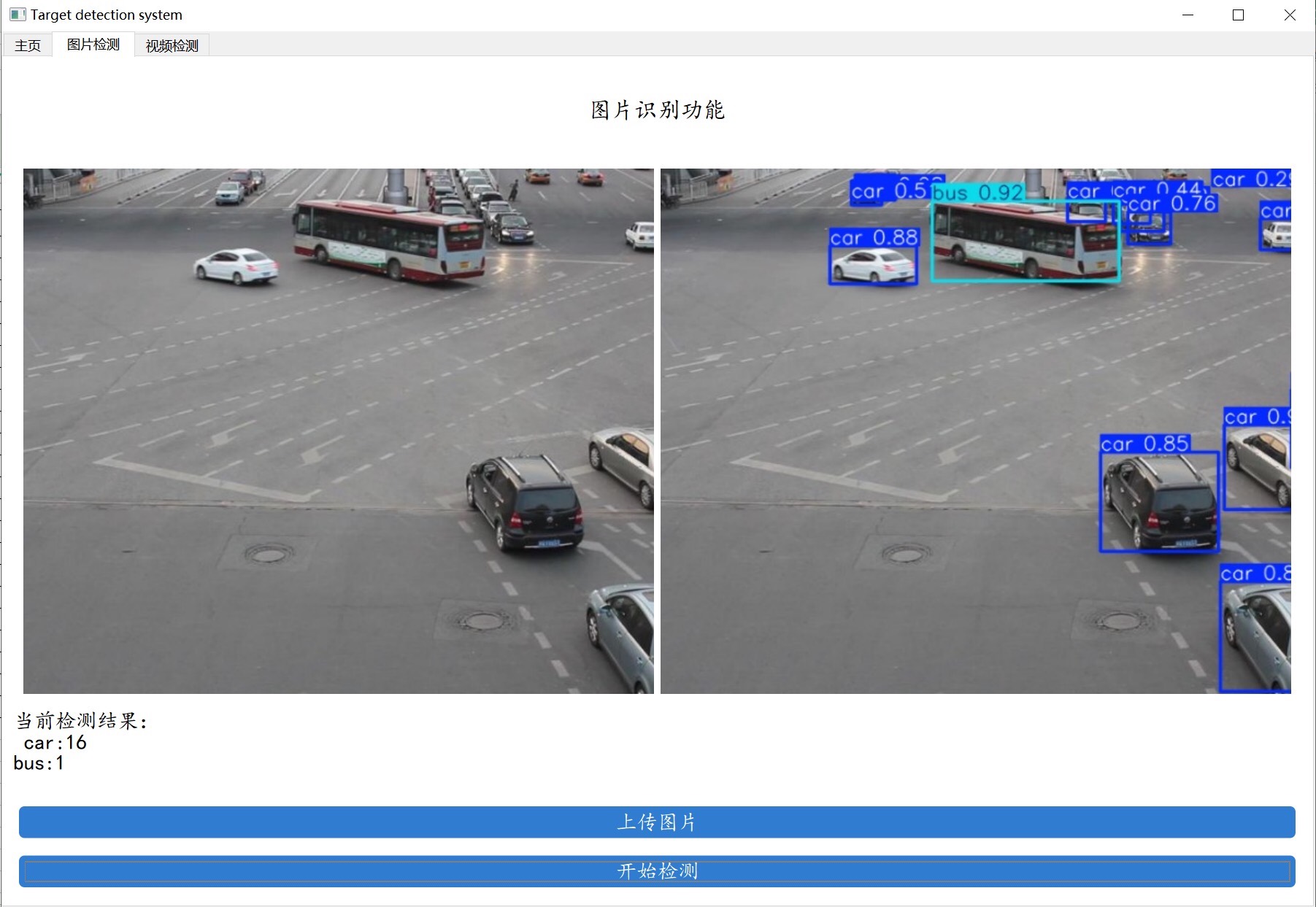
咱们这个项目,软件用的是Pycharm + Anaconda ,环境方面,python版本是3.8 ,还搭配了opencv-python 、PyQt5 以及torch1.9。完整程序文件(.py等):这是核心代码所在,负责整个检测流程的逻辑实现。UI界面源文件、图标(.ui、.qrc、.py等):打造出一个直观的用户界面,方便操作。测试图片、视频文件(.jpeg、.mp4、.avi等):用来测试系
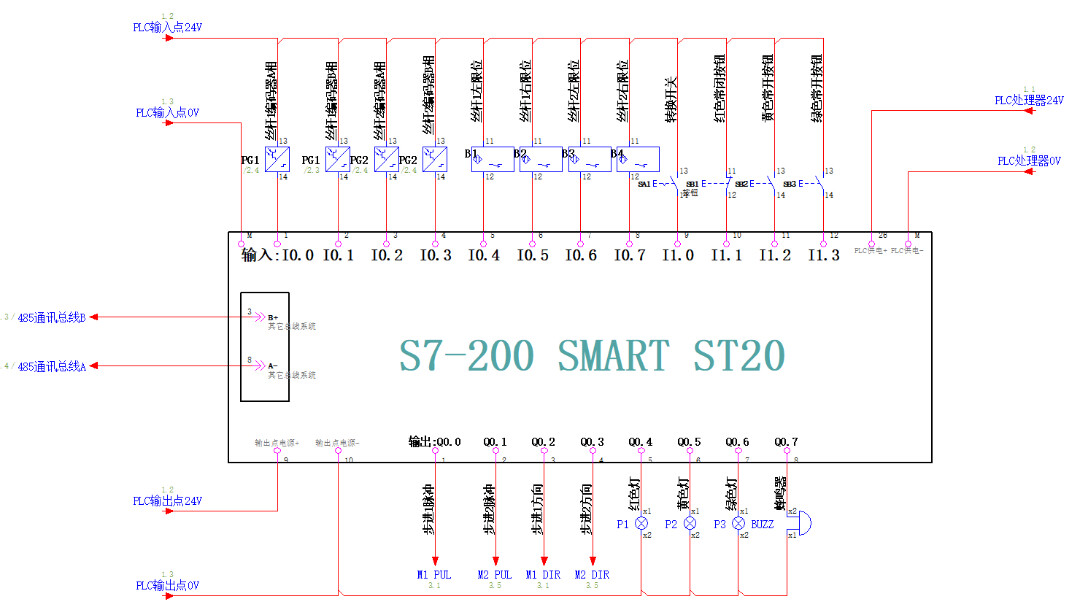
通讯参数设置最关键,MT6070IH走的是RS485,PLC的PORT0口接上,波特率设成187.5k才跑得稳。地址映射这块,触摸屏的数值输入框直接绑定VD200(轴1目标位置)和VD204(轴2目标位置),实时显示用VW210和VW214。西门子S7-200smart PLC运动控制 二轴,高速脉冲控制步进电机或者伺服电机,触摸屏控制,可以设置绝对位置,触摸屏通讯,实时显示当前位置 实例,程序,
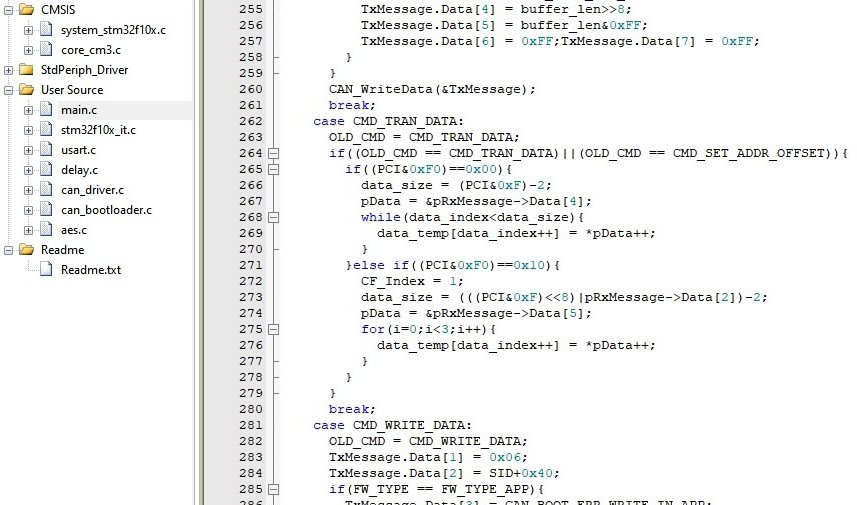
基于STM32F103的CAN bootload程序源码包含boot和app两个工程,已应用到实际项目并量产在嵌入式开发领域,CAN bootload程序对于设备的远程升级以及灵活更新有着至关重要的意义。今天就来给大家分享基于STM32F103的CAN bootload程序源码,这可是包含boot和app两个工程,并且已经成功应用到实际项目甚至实现量产啦。
牵引力控制系统,TCS标定,TCS控制算法,制动滑移和驱动滑转可以通过轮胎与地面的附着特性解决,TCS发动机转矩算法,PID转矩计算,主动制动压力计算在汽车的世界里,牵引力控制系统(Traction Control System,简称 TCS)就像是一位默默守护的骑士,保障着车辆在各种路况下的行驶安全与稳定。今天咱们就来深入聊聊 TCS 的标定、控制算法,还有其中涉及的制动滑移、驱动滑转等问题。