- @Argulo
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
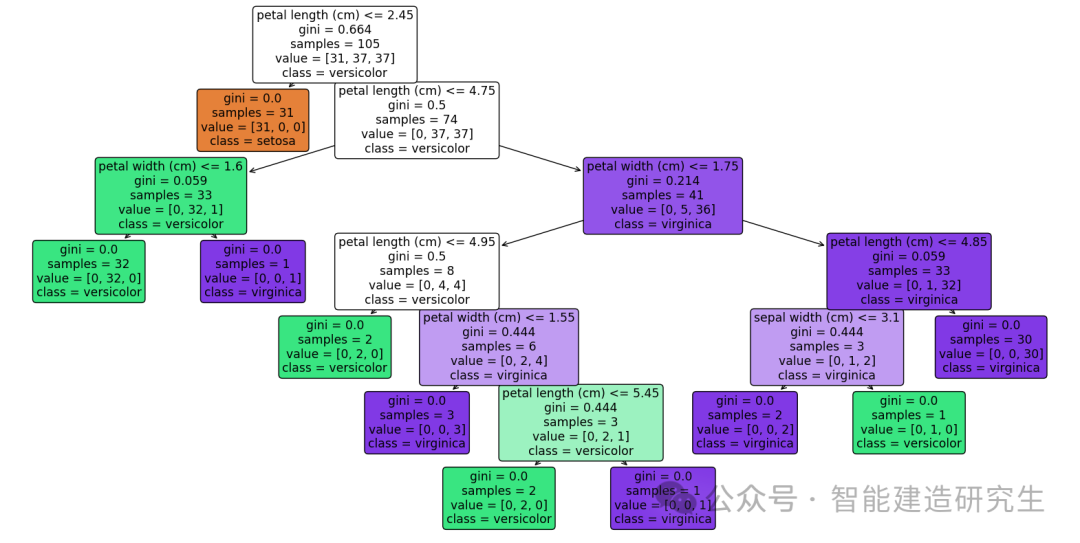
决策树通过递归将数据分割成更小的子集,构建一个树形结构,其中每个节点代表一个特征的测试,分支代表测试结果,叶子节点代表最终的分类或回归结果。通过这个例子可以看到,决策树通过逐层分割特征,将数据分成不同的子集,最终在叶子节点给出预测结果。特征,值小于等于 2.45 的样本被分到左子树,值大于 2.45 的样本被分到右子树。:将上述分割过程形成树形结构,根节点和内部节点代表特征测试,叶子节点代表最终预
在Python中,数据结构是用来存储、组织和管理数据的方式,以便有效地执行各种数据操作。栈是一个后进先出(LIFO)的数据结构,只能在一端(通常是顶部)进行添加或移除元素。队列是一个先进先出(FIFO)的数据结构,元素从一端添加,从另一端移除。字典是无序的,但从Python 3.7开始,字典维护元素的插入顺序。Python中没有内置的栈数据结构,但可以使用列表来实现栈的功能。字典是基于键值对的数据

朴素贝叶斯(Naive Bayes)算法是一种基于贝叶斯定理的分类算法。它广泛应用于文本分类、垃圾邮件检测和情感分析等领域。该算法假设特征之间是独立的,这个假设在实际情况中可能并不完全成立,但Naive Bayes在许多实际应用中仍表现良好。贝叶斯定理描述了后验概率的计算方法,公式如下:在分类问题中,A表示类别,B表示特征向量。Naive Bayes算法通过最大化后验概率来进行分类:由于特征之间独
XGBoost(eXtreme Gradient Boosting,其正确拼写应该是 "Extreme Gradient Boosting",而XGBoost 的作者在命名时故意使用了不规范的拼写,将“eXtreme”中的“X”大写,以突出其极限性能和效率)是一个用于回归和分类问题的高效且灵活的增强树(Boosting Tree)工具。它是梯度提升(Gradient Boosting)算法的一种改

给定两个点云:源点云 ( $ P = { \mathbf{p}_i }$) 和目标点云 ($Q = { \mathbf{q}_j }$),目标是找到一个刚性变换(旋转矩阵 ( $ \mathbf{R} $ ) 和平移向量 ($\mathbf{t} $ )),使得变换后的源点云与目标点云尽可能地对齐。ICP算法作为点云配准的基石算法,具有重要的理论意义和实用价值。通过不断的改进和优化,ICP算法在处

Zlibrary号称是“全球最大的数字图书馆,拥有1391万本书籍,8484万篇论文。笔者几年前开始接触Z库项目,也与周边的朋友分享它。大家给我的反馈都是:“这是一个令人惊奇、欣喜的网站”“很好用”。在人人都可以接触到互联网的时代,我们如何从纷繁复杂的互联网获取到更有效的信息呢?Zlibrary将会是可选方法之一。本文将从零开始介绍如何获取Zlibrary的电子资源,以及接触到Z库项目的途径。