




- @Arcann
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Python下通过TCP通讯来实现对ROS机器人的控制
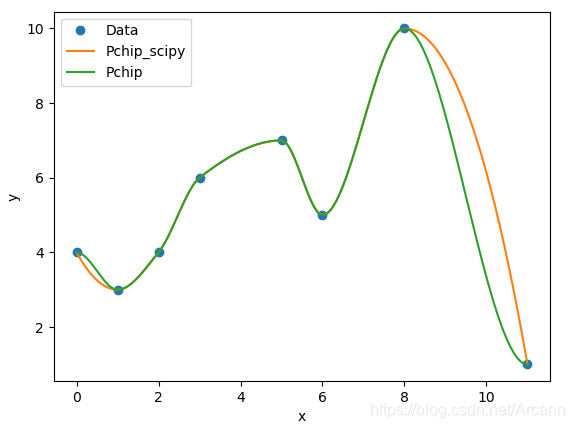
前言在机器人的路径规划中针对离散采样点做插值计算生成平滑的曲线轨迹也是挺重要的一部分,本文主要介绍一下目前使用较多也是个人觉得挺好用的一个插值方法——分段三次 Hermite 插值(PCHIP),并附上Python和Matlab的代码实现(包括调用API以及手斯代码)。目录机器人路径规划之分段三次 Hermite 插值(PCHIP)(上)[快速上手]机器人路径规划之分段三次 Hermite 插值(
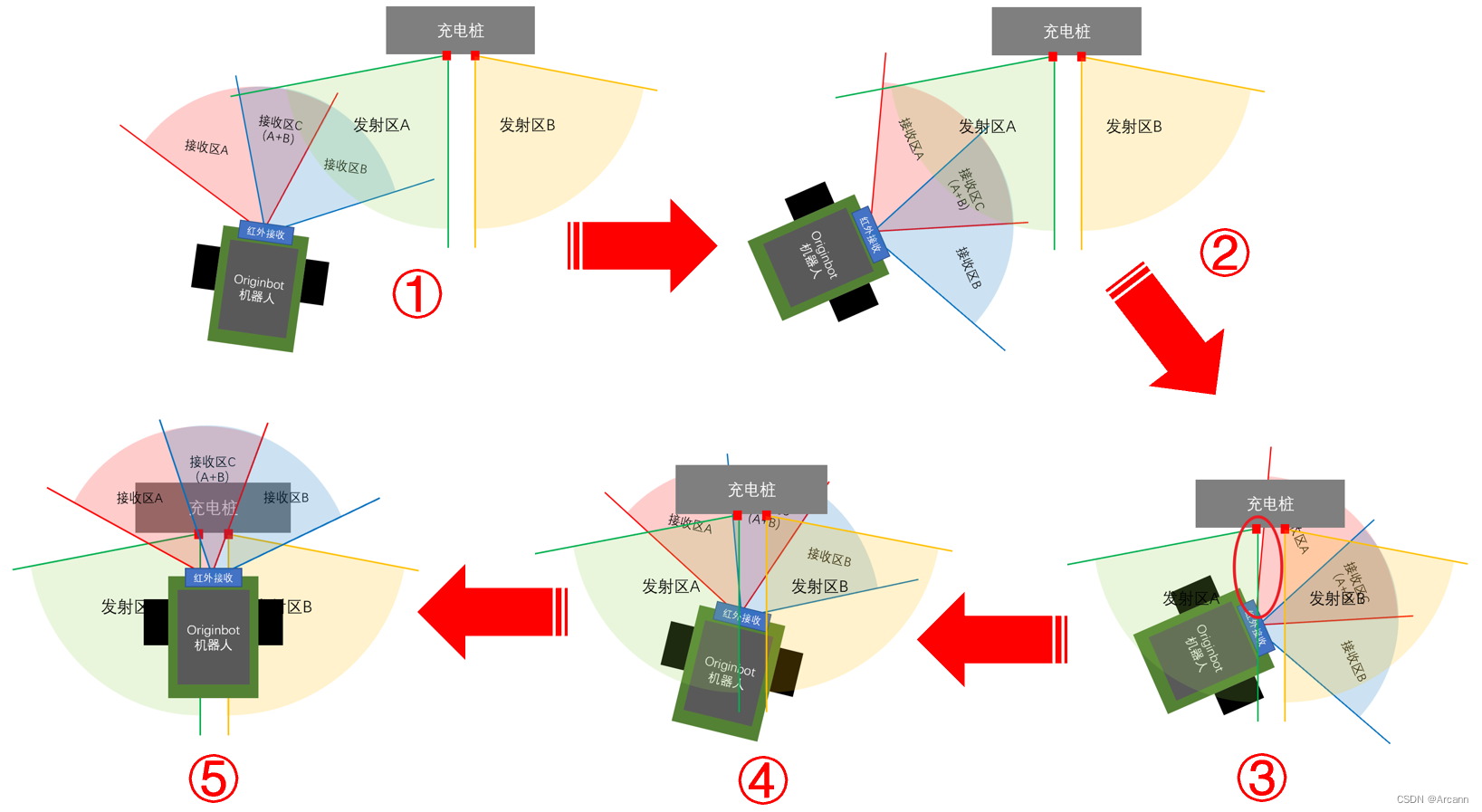
主要介绍了一下现有的自动回冲方案基本原理(包括红外、视觉、激光等),然后对其落地应用做了简单的分析,后期将着重对视觉对位(基于AprilTag码)进行探索。
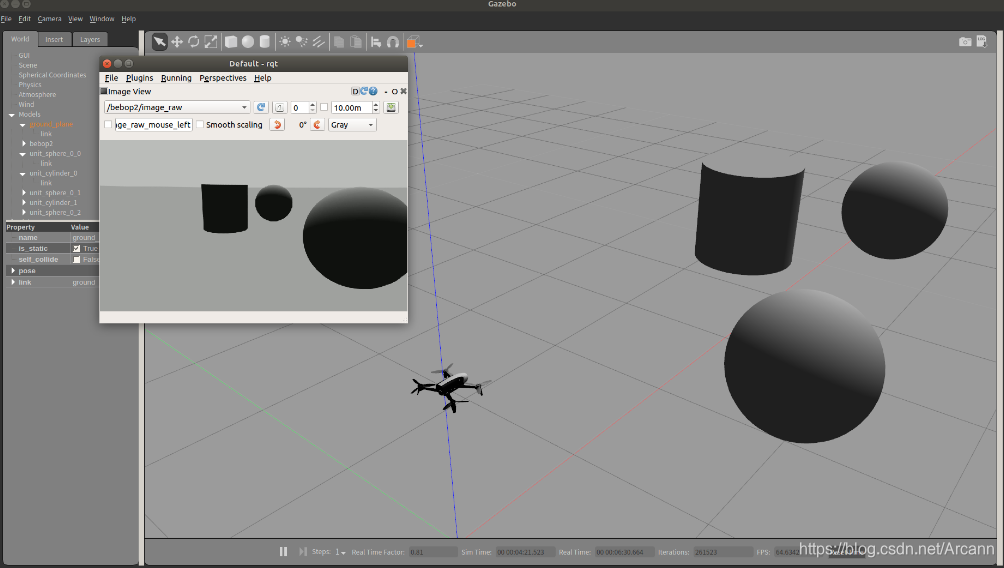
之前写过一篇使用 Parrot 家的 Bebop 2 无人机做目标识别和跟踪转向的小项目“ROS实现无人机目标跟踪/物体跟随/循迹”,但是由于硬件实物的条件限制,很多同学无法拿去用,为此我做了一些尝试,希望可以在 Gazebo 仿真环境下使用 Parrot Bebop 2 进行实验。............
前言在机器人的路径规划中针对离散采样点做插值计算生成平滑的曲线轨迹也是挺重要的一部分,本文主要介绍一下目前使用较多也是个人觉得挺好用的一个插值方法——分段三次 Hermite 插值(PCHIP),并附上Python和Matlab的代码实现(包括调用API以及手斯代码)。目录机器人路径规划之分段三次 Hermite 插值(PCHIP)(上)[快速上手]机器人路径规划之分段三次 Hermite 插值(
软件平台Ubuntu 18.04ROS MelodicGazebo硬件平台(可选)Turtlebot3预备知识了解 ROS 的基本操作逻辑,若需学习,可移步我的专栏:ROS 学习记录目录多机器人协同控制①——仿真平台搭建

目录1. 初识1.1 到手开箱1.2 OrangePi Kunpeng Pro1.2 上电2. 安装Ubuntu2.1 准备工作2.2 安装3. 安装ROS23.1 设置支持UTF-8的locale编码3.2 添加证书3.3 安装ROS3.4 设置环境变量3.5 小海龟来啦4. 运行实例4.1 安装Gazebo4.2 安装turtlebot总结 1. 初识 1.1 到手开箱 搞来一套OrangeP