- @AMuLkWmyERqH
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
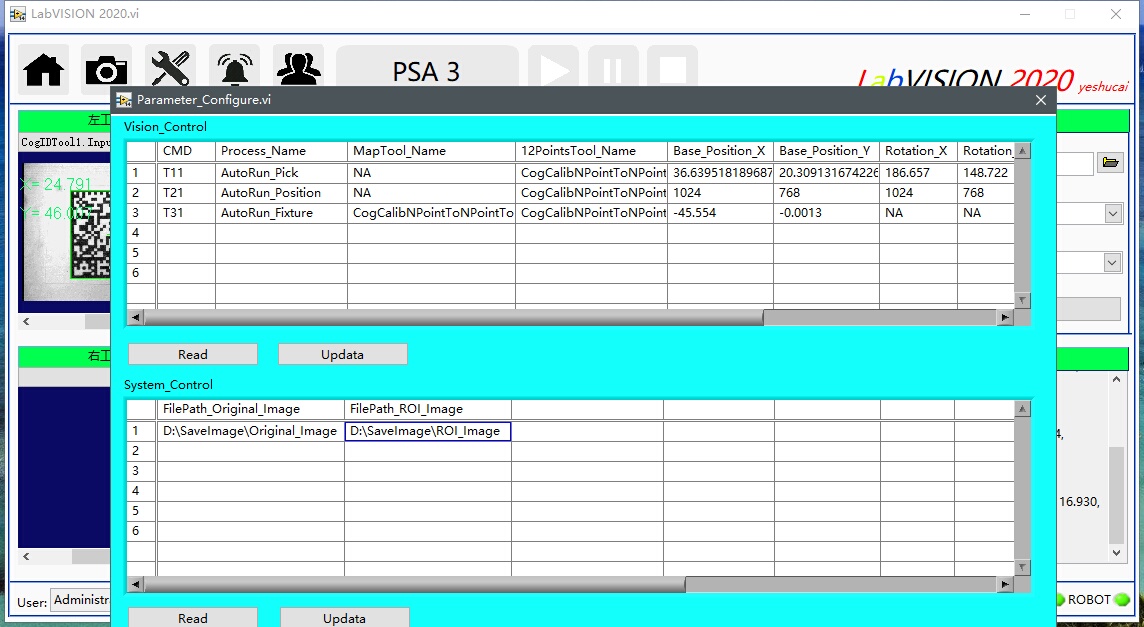
通过以上代码示例,可以看到 LabVIEW 调用 VisionPro 的一些常见操作。VisionPro 提供了强大的图像处理功能,而 LabVIEW 则提供了灵活的控制和接口,两者结合可以实现复杂的机器视觉应用。开发过程中需要注意内存管理和代码规范,确保程序的稳定性和可靠性。希望这篇文章能对大家的开发工作有所帮助!
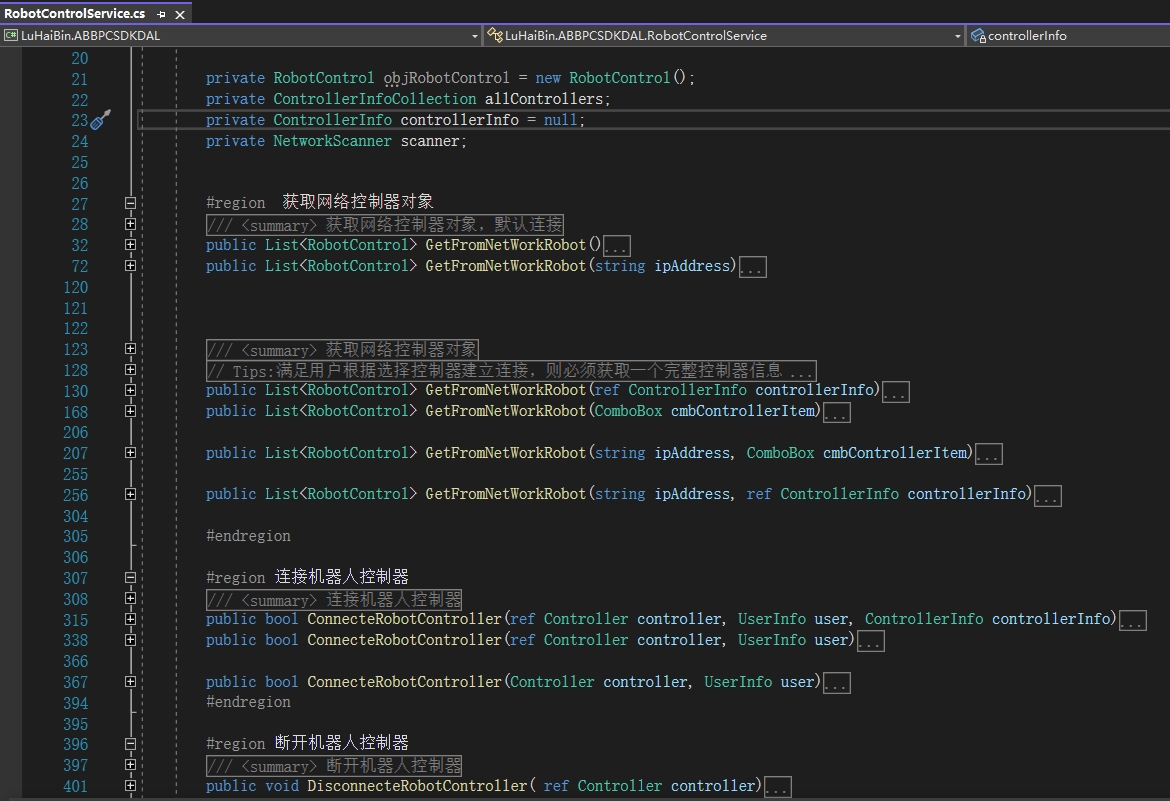
【ABB机器人数据采集与监控系统】是一款覆盖网络通信、远程控制、移动机器人、位姿数据采集、信号数据采集、程序编辑、程序传输、系统备份、系统恢复、输出日志等多种功能为一体的软件。【ABB机器人数据采集与监控系统】是一款覆盖网络通信、远程控制、移动机器人、位姿数据采集、信号数据采集、程序编辑、程序传输、系统备份、系统恢复、输出日志等多种功能为一体的软件。玩转这套系统的精髓在于:代码要像瑞士军刀一样锋利
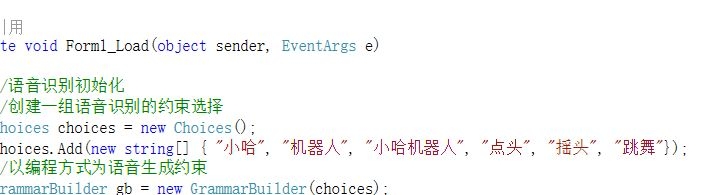
发那科机器人上位机,C#,语音识别控制,FANUC在自动化控制领域,发那科(FANUC)机器人以其高精度和稳定性被广泛应用。今天咱们来聊聊如何通过C#语言开发上位机,结合语音识别技术来控制发那科机器人,这就像给机器人装上了一个“听话的耳朵”,让它能听懂我们的指令。
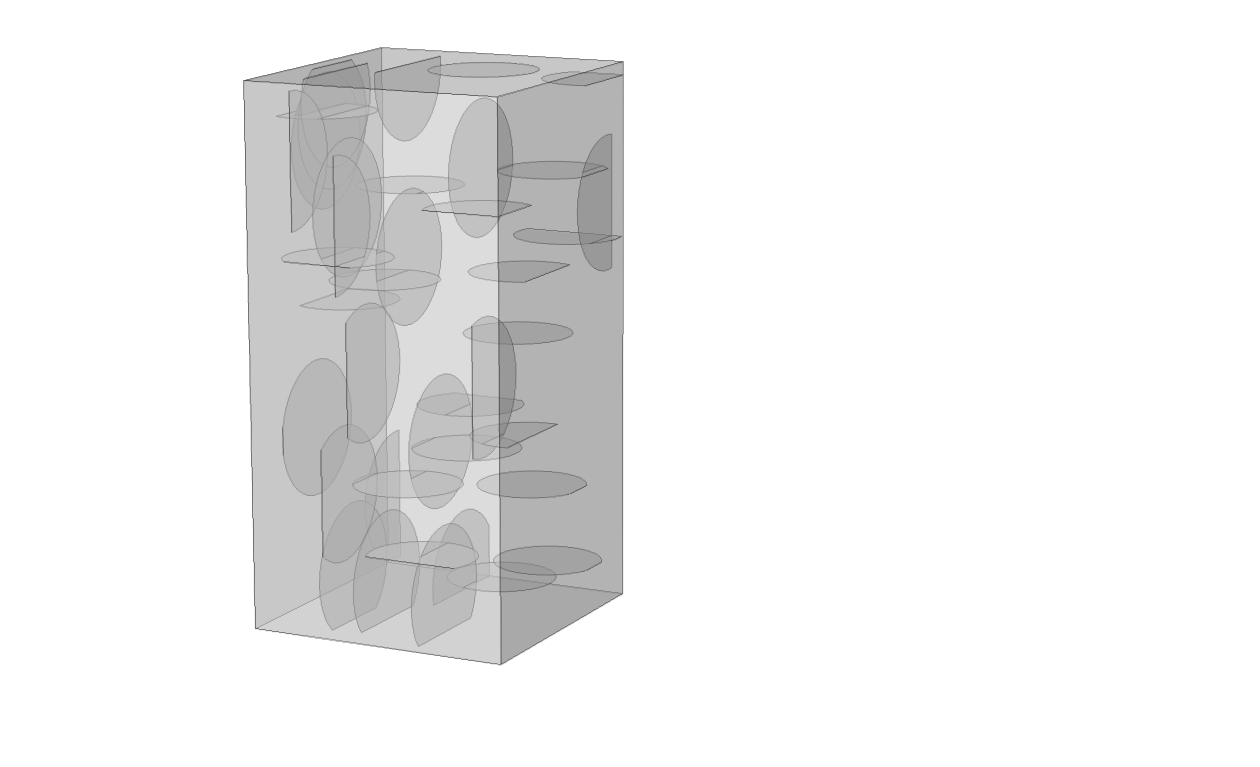
裂隙长度的分布律可以为确定的裂隙长度,也可以为在一定范围内随机均匀分布的长度。裂隙长度的分布律可以为确定的裂隙长度,也可以为在一定范围内随机均匀分布的长度。可以直接导入COMSOL中,无需CAD,无需提取数据,方便快捷可以直接计算。可以直接导入COMSOL中,无需CAD,无需提取数据,方便快捷可以直接计算。注释十分详细,有运行的示范视频,可以直接改数据生成需要的三维裂隙网格。注释十分详细,有运行的
发那科机器人上位机,C#,语音识别控制,FANUC在自动化控制领域,发那科(FANUC)机器人以其高精度和稳定性被广泛应用。今天咱们来聊聊如何通过C#语言开发上位机,结合语音识别技术来控制发那科机器人,这就像给机器人装上了一个“听话的耳朵”,让它能听懂我们的指令。
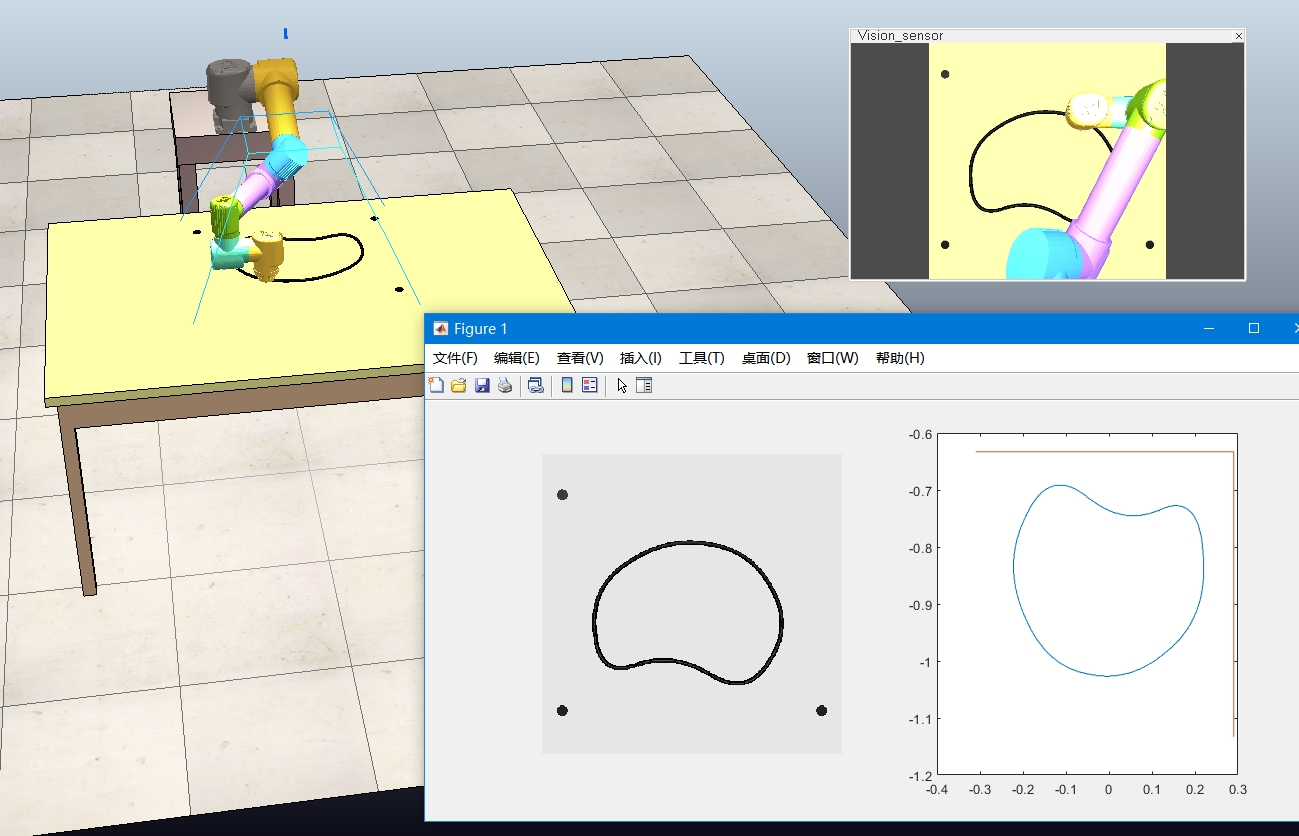
咱们可以直接用摄像头拍张轨迹图,让MATLAB当大脑处理图像,最后指挥机械臂描着线走。实际跑起来发现,要是遇到反光区域,得加个形态学闭运算填洞,不然轨迹线会断成贪吃蛇。vrep/coppeliasim+matlab,机器视觉,机械臂轨迹巡线,利用matlab提取像素轨迹,再转换到机械臂坐标系下,让机械臂末端沿着轨迹走;vrep/coppeliasim+matlab,机器视觉,机械臂轨迹巡线,利用m
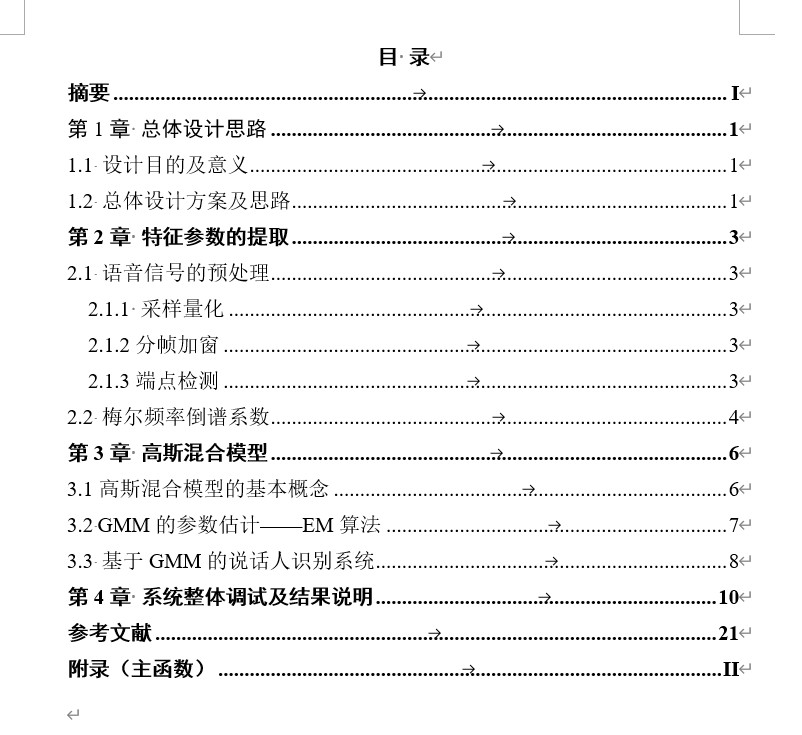
本系统是一套运行于MATLAB环境下的说话人识别解决方案,核心采用梅尔频率倒谱系数(MFCC)进行语音特征提取,结合高斯混合模型(GMM)实现说话人身份建模与匹配,最终完成“多选一”式说话人辨认任务。系统遵循“数据预处理-特征提取-模型训练-识别匹配”的经典机器学习流程,支持多说话人语音数据的批量处理,可输出可视化的特征图谱与量化的识别正确率,适用于语音识别技术研究、生物认证原型开发等场景。Mat
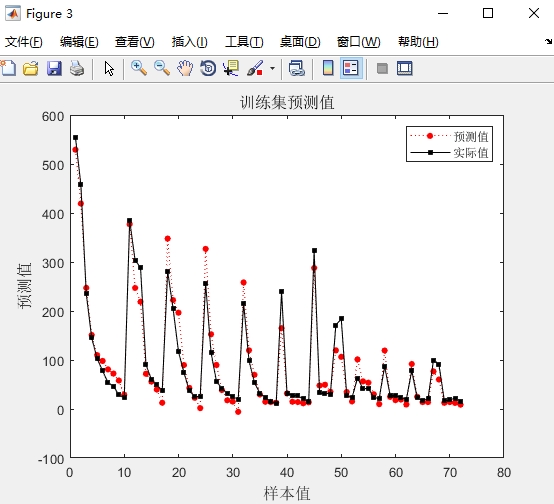
基于粒子群算法优化BP神经网络(PSO-BP)的多变量输入单输出回归预测模型,matlab代码实现在机器学习和预测领域,BP神经网络(Back - Propagation Neural Network)是一种广泛应用的模型,但它容易陷入局部最优解。粒子群算法(Particle Swarm Optimization, PSO)则以其全局搜索能力而闻名。将PSO与BP神经网络相结合(PSO - BP)
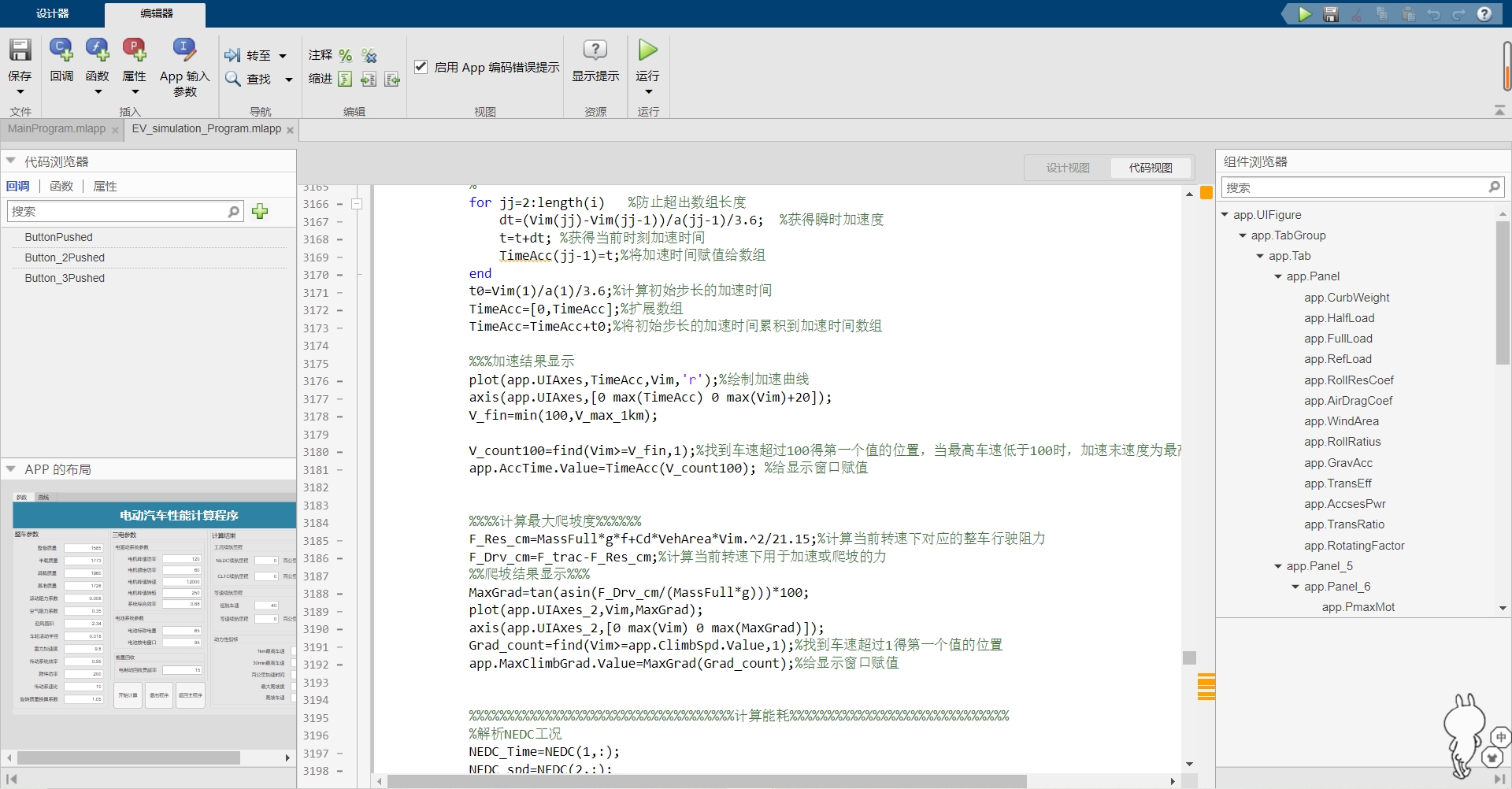
电动汽车动力经济性开发程序是一款基于Matlab平台开发的专用仿真工具,主要用于电动汽车动力系统的匹配设计和整车性能仿真分析。该程序通过图形用户界面(GUI)提供了直观的操作体验,使工程师能够快速完成电动汽车的动力总成参数匹配和整车性能评估。
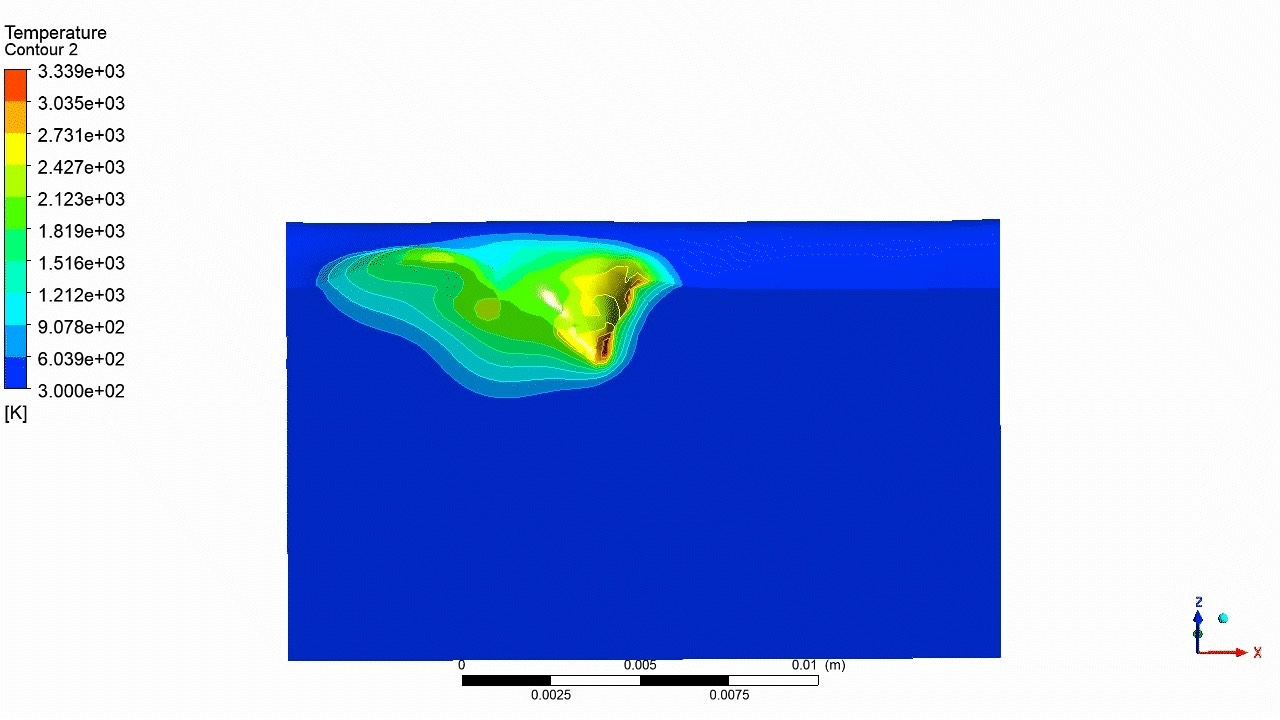
总的来说,通过对激光熔覆熔池匙孔温度场与流场的模拟仿真,我们可以更深入地理解激光熔覆的物理过程和机制。未来,随着计算机技术的不断进步和数值计算方法的不断完善,我们相信激光熔覆的模拟仿真技术将更加成熟和精确,为制造业的快速发展提供更多的可能性。首先,模拟仿真需要建立一个现成的模型。在这个过程中,熔池匙孔的生成以及其内部温度场与流场的分布情况,对于激光熔覆的质量和效果具有决定性影响。在流场模拟方面,通