- @2508_94216386
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
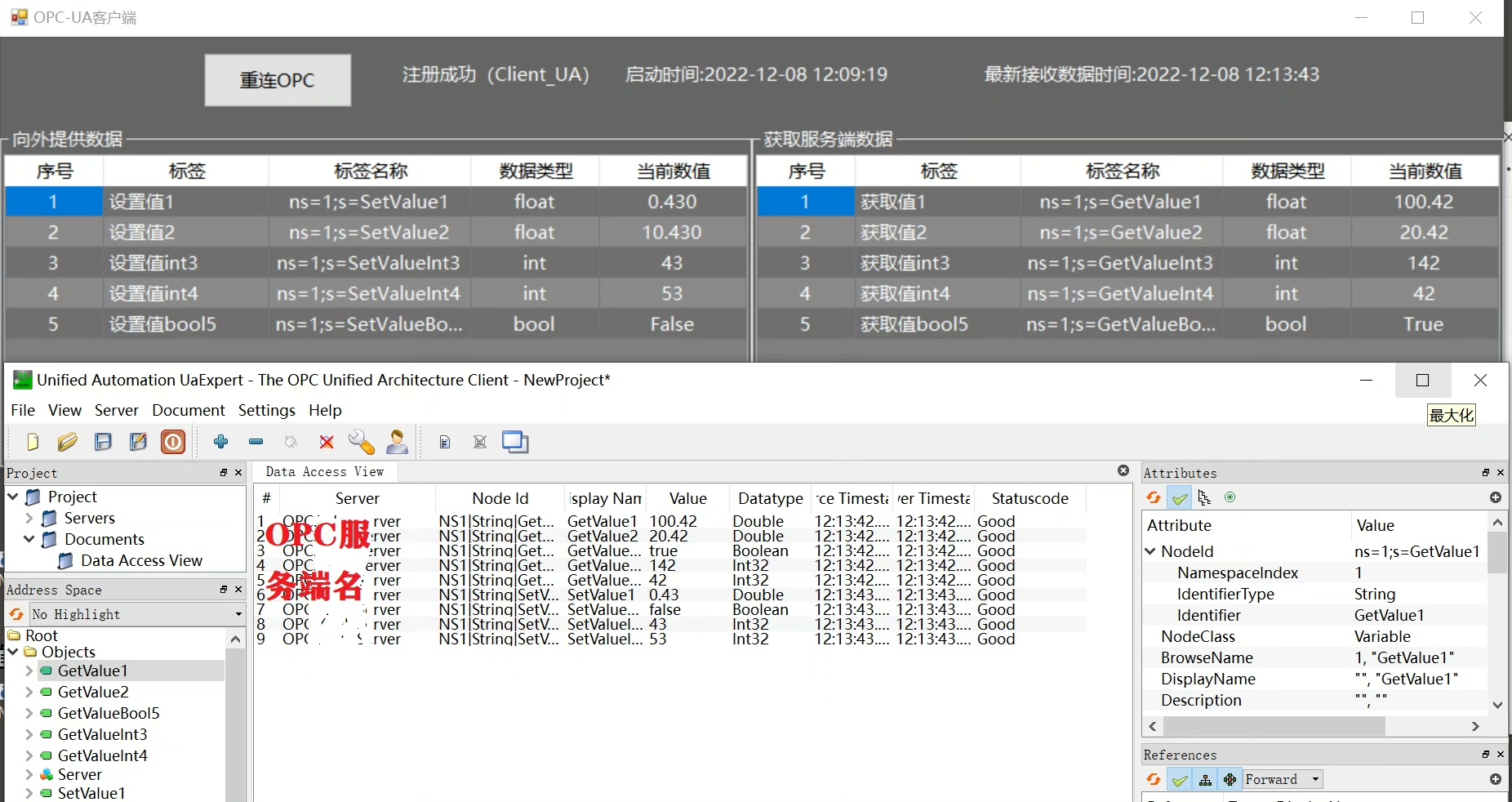
本文档旨在全面解析一套基于 C# 开发的 OPC UA 客户端封装库(以下简称OPCClnUA),该库通过调用底层原生 DLL(opccln.dll)提供的接口,实现了对 OPC UA 服务器的连接、读写、状态监控等核心功能。整体架构采用分层设计,对外暴露简洁易用的托管接口,同时隐藏了底层通信细节和资源管理复杂性,适用于工业自动化、数据采集、系统集成等场景。OPCClnUA是一套轻量、实用的 OP
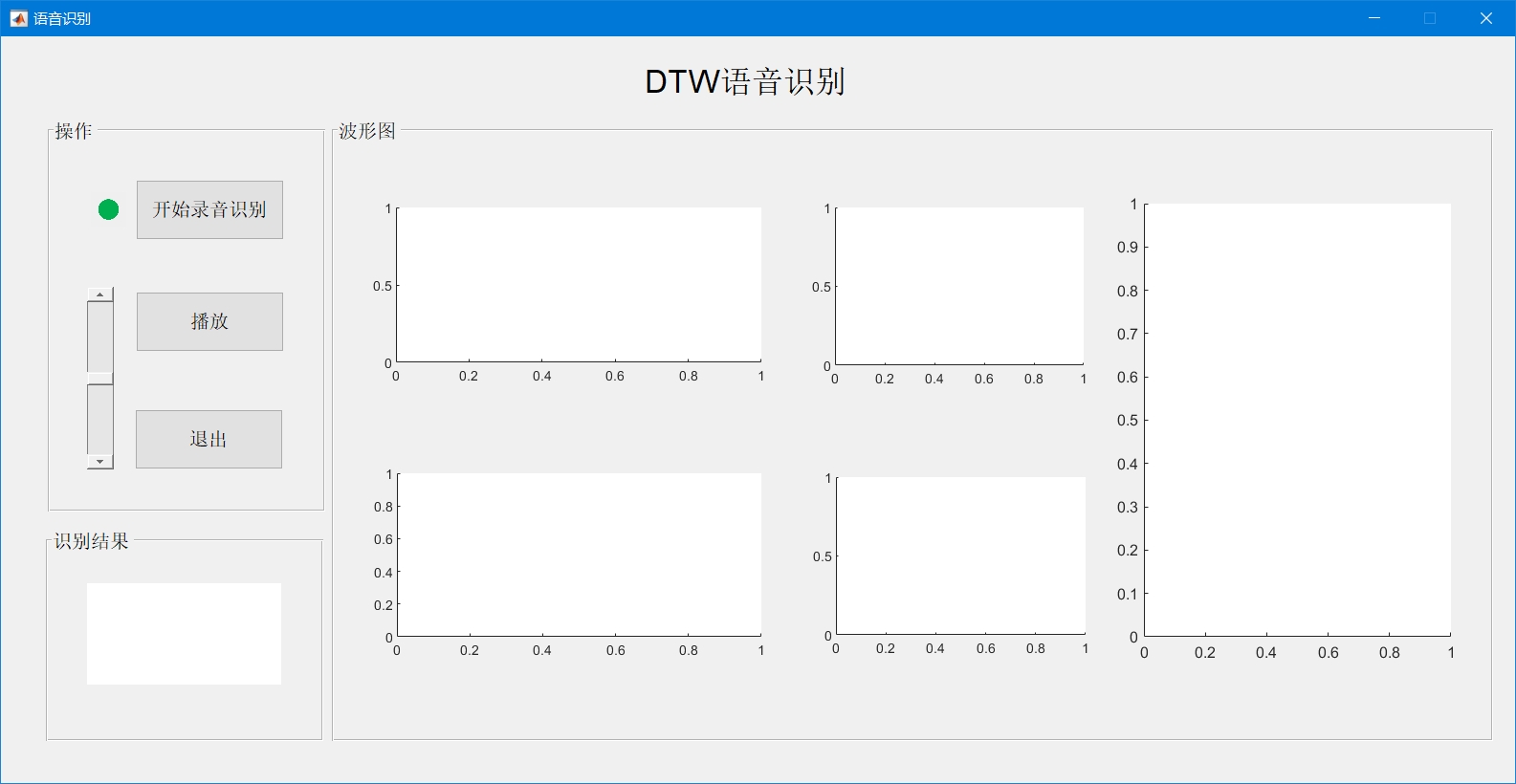
本系统是基于MATLAB平台开发的特定人孤立词语音识别系统,核心功能为识别0-9共10个数字语音。系统采用动态时间规整(DTW)算法实现语音特征匹配,结合梅尔频率倒谱系数(MFCC)提取语音关键特征,通过图形用户界面(GUI)提供直观的人机交互,涵盖语音采集、预处理、特征提取、模板训练与识别全流程,可满足基础数字语音识别场景的功能需求。
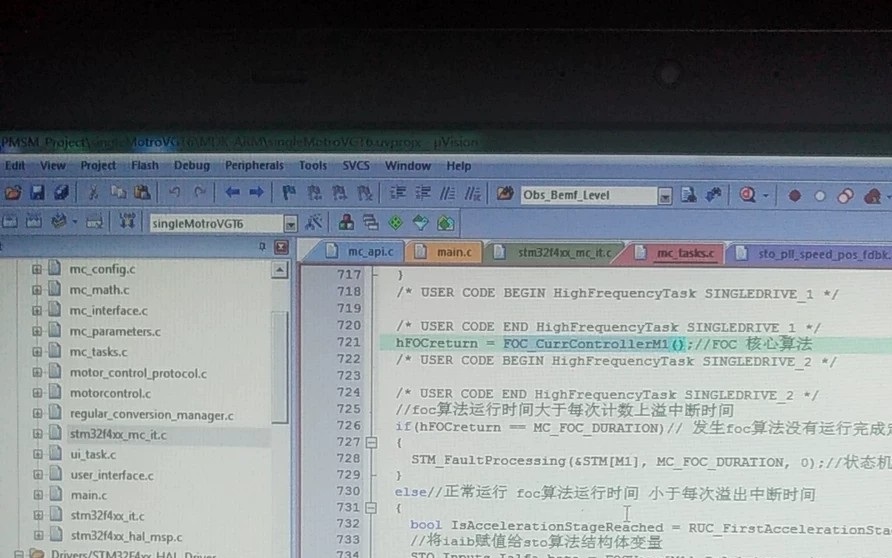
STM32电机库5.4开源注释 KEIL工程文件 辅助理解S STM32电机库5.4开源注释KEIL工程文件辅助理解ST库寄存器设置AD TIM1龙贝格+PLL前馈控制弱磁控制foc的基本流svpwm占空比计算方法斜坡启动死区补偿有详细的注释,当前是无传感器版本龙贝格观测,三电阻双AD采样。
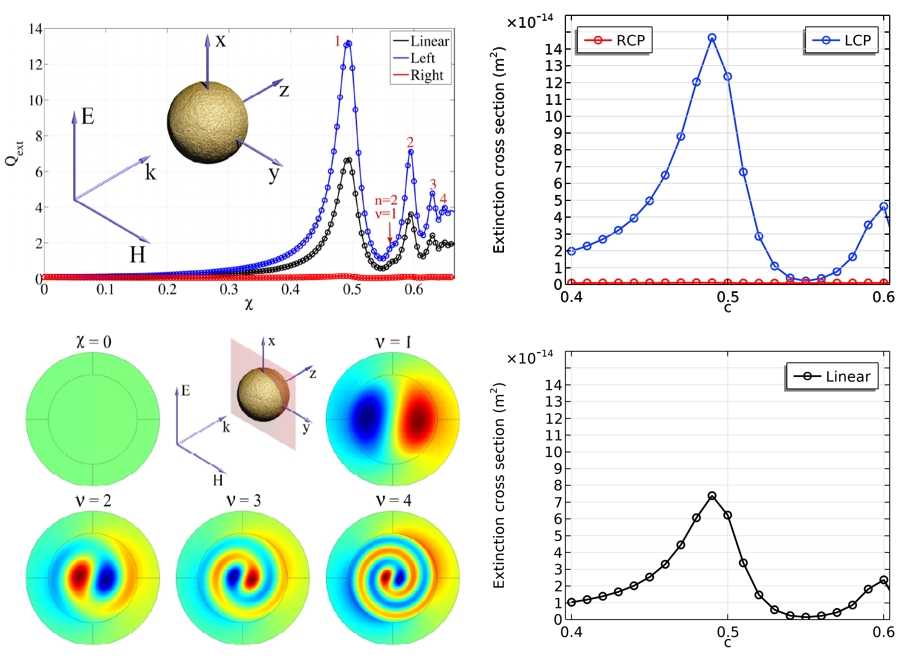
站在电磁仿真工程师的工位前,调试手性介质模型就像在调一杯分子鸡尾酒。咱们先把手性介质掰开了揉碎了说说——这玩意儿和普通材料的根本区别在于电场和磁场会产生交叉耦合,就像双螺旋DNA链那样互相缠绕。别急着选现成的材料,直奔材料属性的User Defined本构关系。这个交叉项像调音台的推子,推过了模型直接发散。后来发现是网格没吃透旋转场的涡流特征,在介质表面加密了三层边界层网格才稳住。在参数扫描里勾选
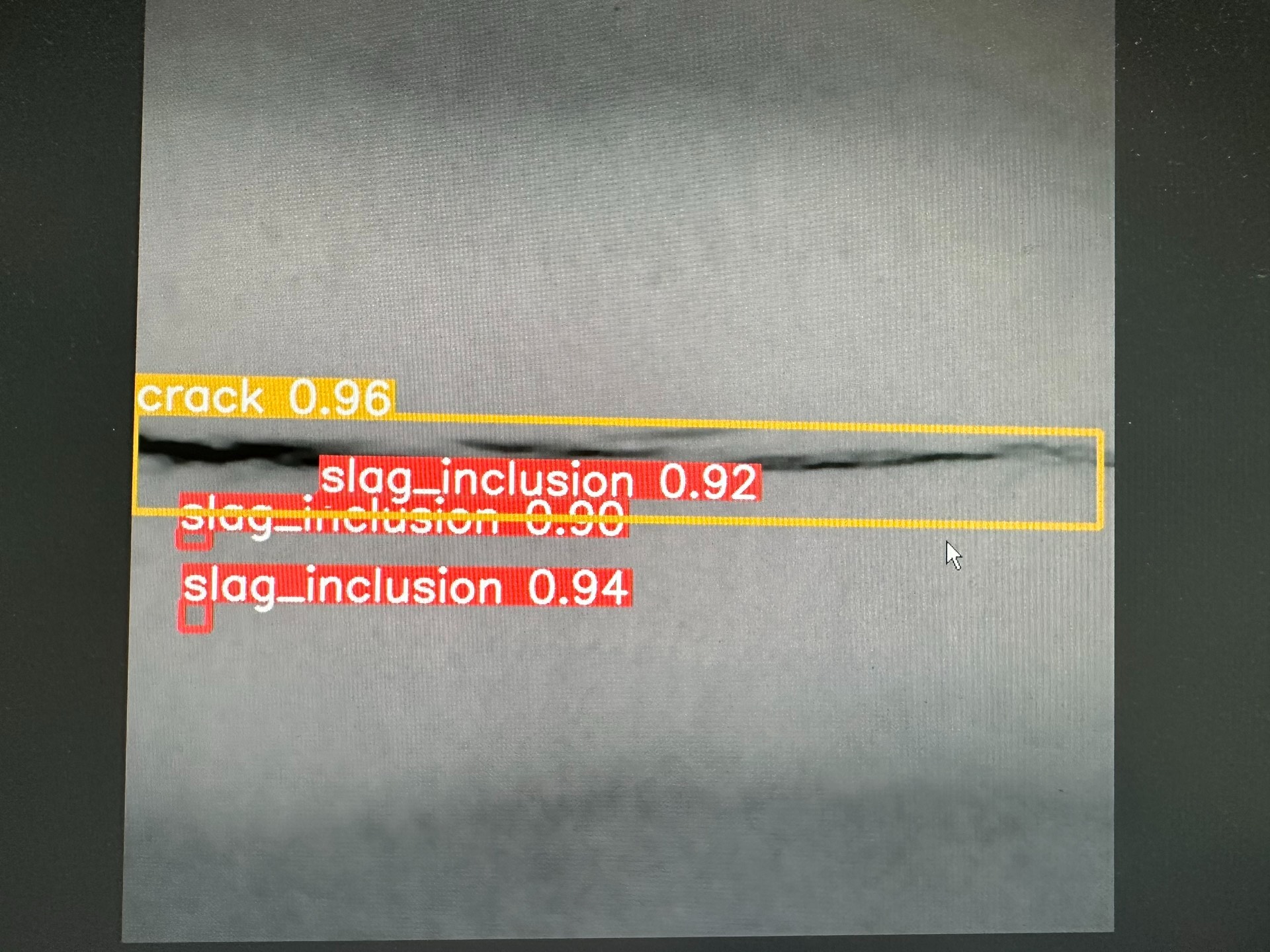
最后在YOLOv5上跑出的效果:mAP@0.5达到87.4%,但实际部署时发现对密集气孔的误检率偏高。最近折腾了个X射线底片数据集,5232张带VOC格式标注,包含裂纹、气孔、夹渣、未融合四类缺陷。构建的焊缝缺陷目标检测数据集,扩增5232张,缺陷标注4类,裂纹 气孔 夹渣 未融合/未焊透,VOC格式,处理…注意边缘区域的缺陷要复制扩充,避免被截断。这套组合技重点保留缺陷区域特征,在保持标注框有效
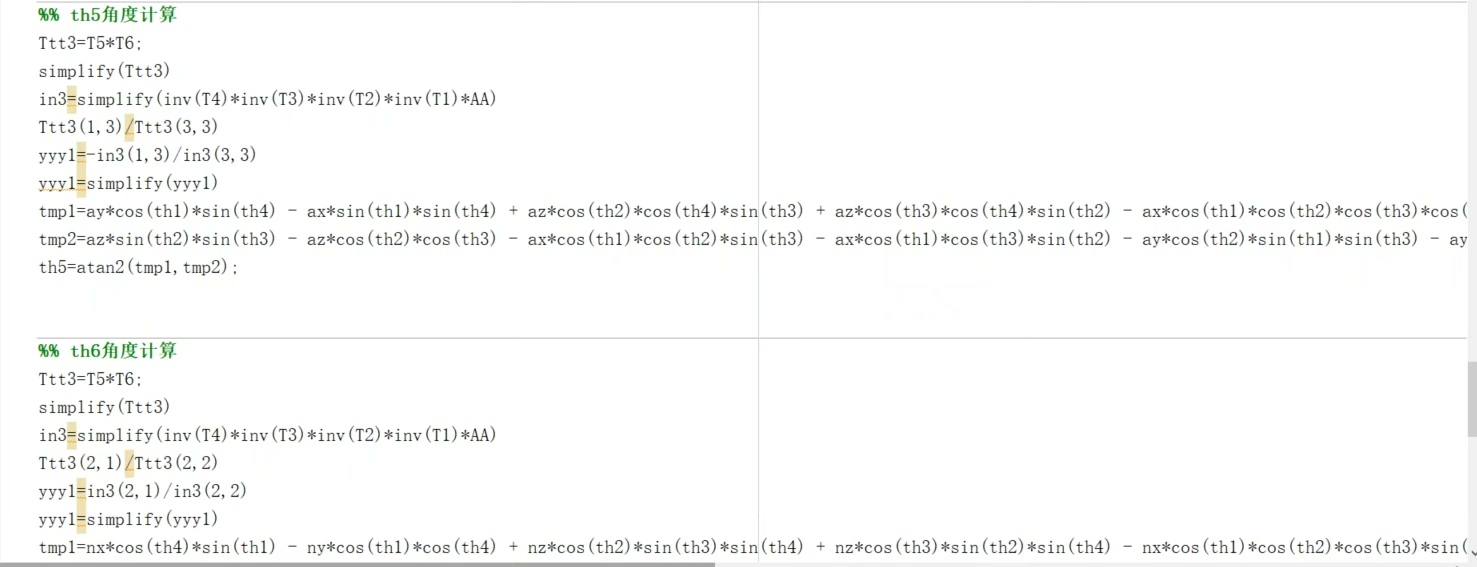
重点盯着位置向量的z分量和旋转矩阵的第三列,这些往往包含最简形式的关节角组合。记住,解逆解就像拆俄罗斯套娃,解出一个关节就把它代入下一个方程,直到所有关节都被扒光——呃,是被解算出来。解出来的q1可能有两个解,对应机械臂的肘部上/下两种构型。传统方法不是几何法就是代数法,今天咱们玩点实在的,用Matlab符号计算暴力拆解六轴串联机械臂的逆解。如果出现厘米级误差,八成是哪个关节的pi符号处理漏了,检
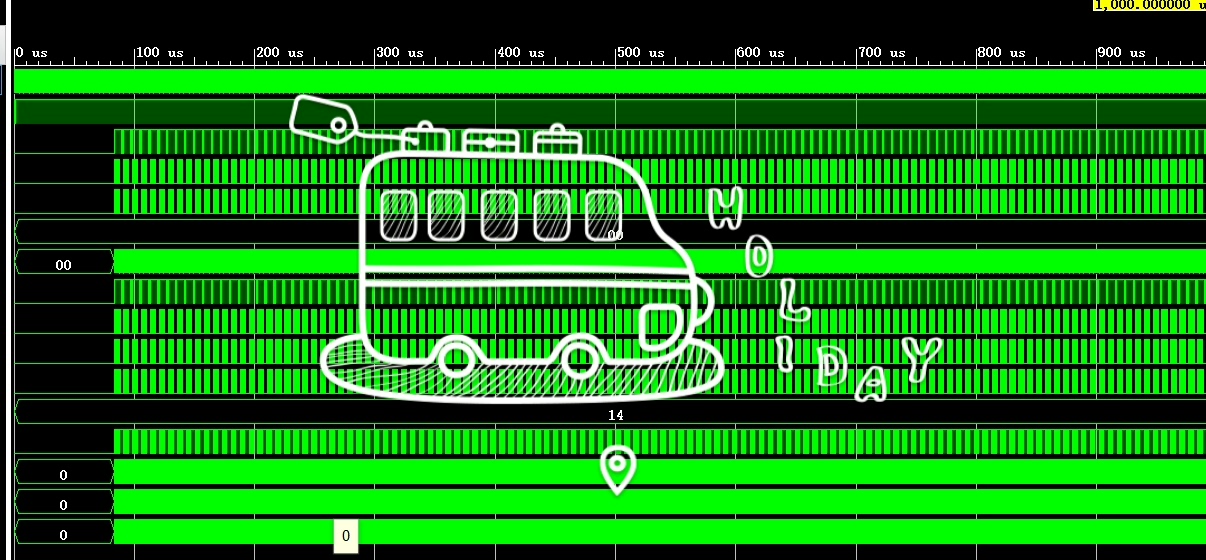
直接上干货,咱们分模块拆解实现过程,重点看几个关键代码段怎么落地。代码仓库已开源(假装有链接),下期预告:上神经网络做目标识别,敬请期待焊板子的香味!OV5640的初始化参数巨多,实测发现直接套用正点原子的初始化脚本会跪在YUV输出模式。注意时钟配置要和后级处理模块对齐,实测25MHz时图像撕裂明显,降到12MHz后稳定得像条狗。画框模块有个坑:必须用脉冲生成方式绘制,直接写RAM会导致时序错乱。
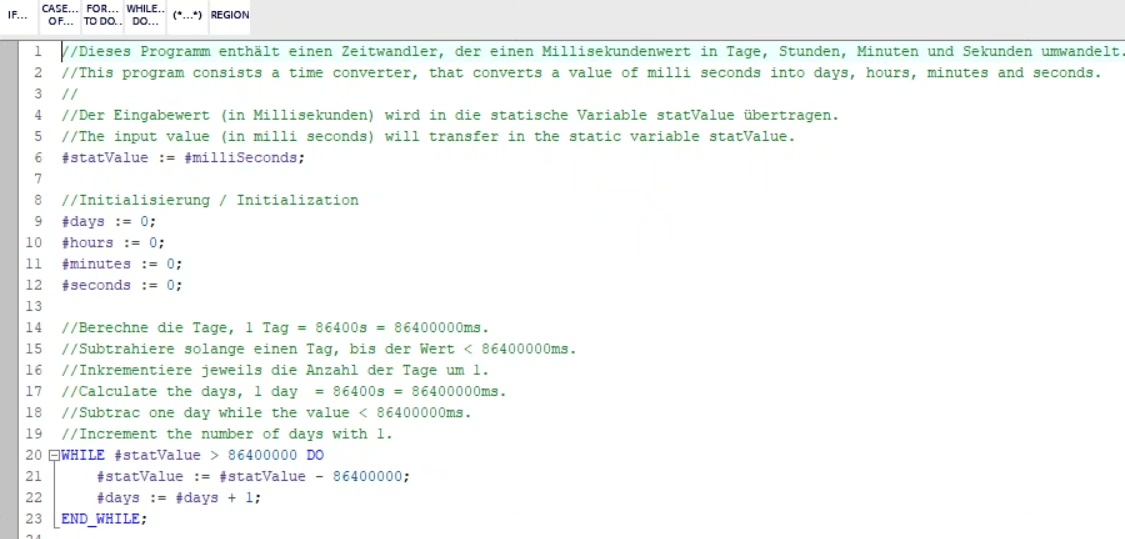
西门子PLC自带的时间记录功能用过的都知道,那玩意儿就跟闹着玩似的,扫描周期造成的误差能气死人。西门子PLC精确计算设备运行时间程序,1200PLC和1500PLC通用,两次读取PLC的实时时间做比较,这样就可以不算入PLC每次扫描时间,非常准确的记录设备运行时间。PLC的扫描周期虽然不稳定,但两次读取动作发生在同一个扫描周期内,系统时间的差值刚好就是程序处理实际业务逻辑的时间。这段处理跨天的逻辑
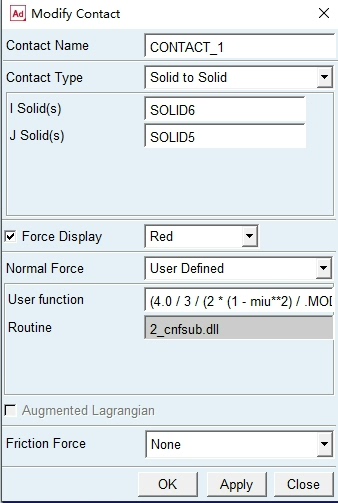
多体动力学方法建立含间隙铰关节机构动力学方程,理论方程MATLAB数值计算编程+ADAMS仿真分析(可嵌入自编接触力模型,.dll文件动态链接库生成方法视频)adams的不是仿真模型,matlab程序一套,Adams自定义接触力函数关联adams仿真方法视频一个 这套模型很难调收敛性价比高,支持和。系统采用进行数值积分,适用于求解刚体系统的动力学响应。
还能自定义目标转速波形,进行相关可靠性试验。这就需要一些算法来生成自定义波形的数据,然后再发送出去。i < 100;i += 0.1)// 发送自定义波形数据作为目标转速分析:通过一个循环生成了正弦波形的X轴和Y轴数据,这里的Y轴数据就作为自定义的目标转速。然后把这些数据发送出去,就能进行可靠性试验啦。可以根据实际需求修改算法,生成各种不同的目标转速波形,来满足不同的试验要求🤓。