




- @2301_81827665
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
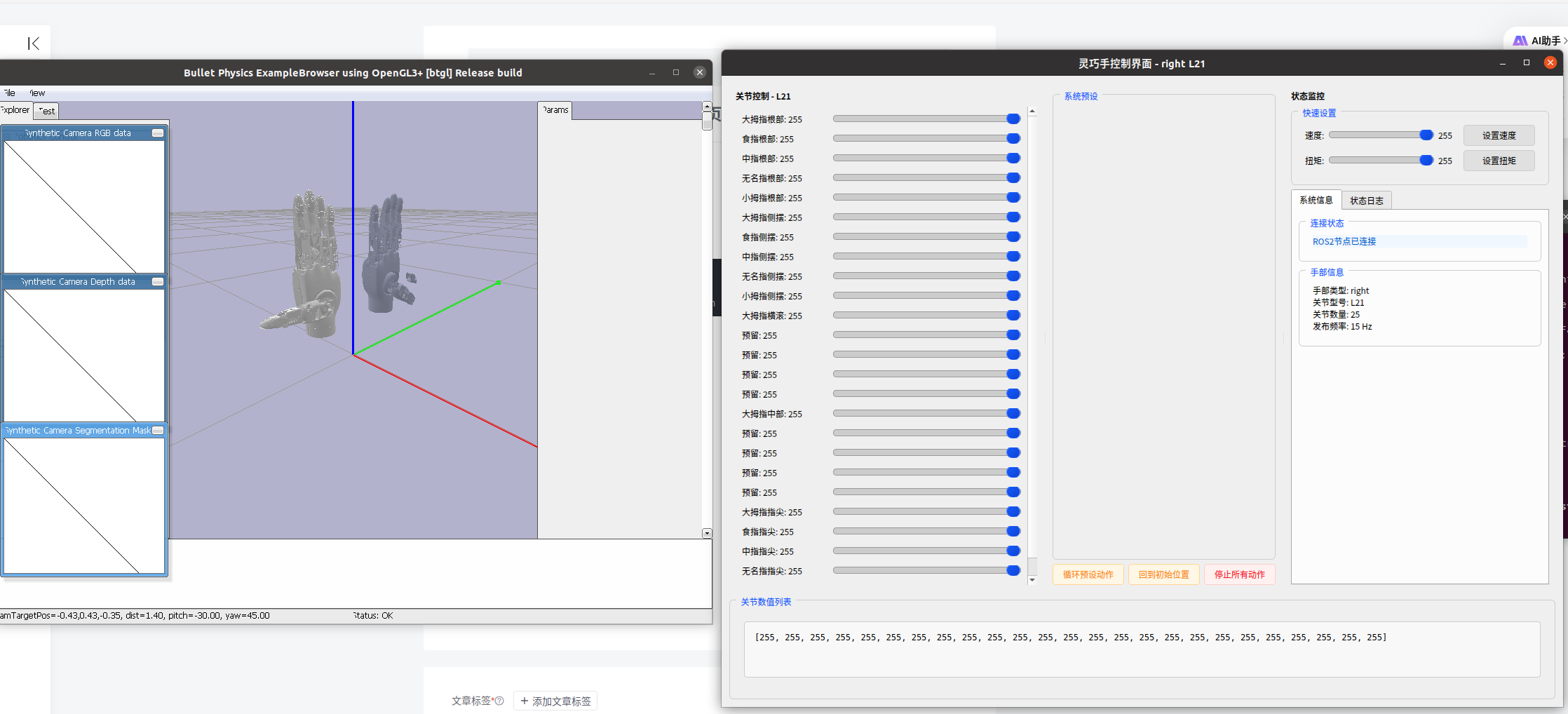
本文介绍了Linker Hand灵巧手ROS仿真系统的配置与使用方法。主要内容包括:1)修改gui_control.launch文件参数以适配不同灵巧手版本;2)启动图形界面和Pybullet仿真环境的具体操作步骤;3)指出L21型号的URDF文件存在问题,建议从指定网站获取正确的URDF文件替换;4)提供完整的仿真控制器代码实现,包含Pybullet环境初始化、关节控制、状态发布等功能;5)展示
我们介绍了LEAP Hand及其核心设计原则。遵循这些原则,我们证明了LEAP Hand在力量、抓取能力和耐用性方面相较于市场上的其他手部表现极为出色。我们展示了它在多种现实世界任务中的实用性,包括远程操作、行为克隆和模拟到现实(sim2real)。我们开源了URDF模型、3D CAD文件以及一个带有实用API的开发平台。在未来的工作中,我们计划开发低成本触觉传感器并将其与LEAP Hand集成。

摘要:NVIDIA显卡驱动安装后仍出现卡屏问题,原因是外接显示器(HDMI-1-1)与主屏(eDP-1)刷新率不匹配。通过xrandr检测显示,两者虽同为2560x1440分辨率,但刷新率分别为120Hz和59.99Hz,导致镜像模式失败。解决方法:使用xrandr命令统一刷新率参数,如"xrandr --output HDMI-1 --same-as eDP-1 --mode 2560
摘要:Bi-DexHands是一个基于强化学习的双手操作项目,采用模块化架构设计。核心包含:1)训练入口train.py负责参数解析和环境初始化;2)tasks模块定义物理仿真环境,实现任务类基础方法;3)algorithms模块实现PPO、MAPPO等算法;4)utils提供辅助工具;5)cfg目录存放Hydra格式的配置参数。项目特色是支持多智能体强化学习,通过GPU并行环境实现高效训练,包含
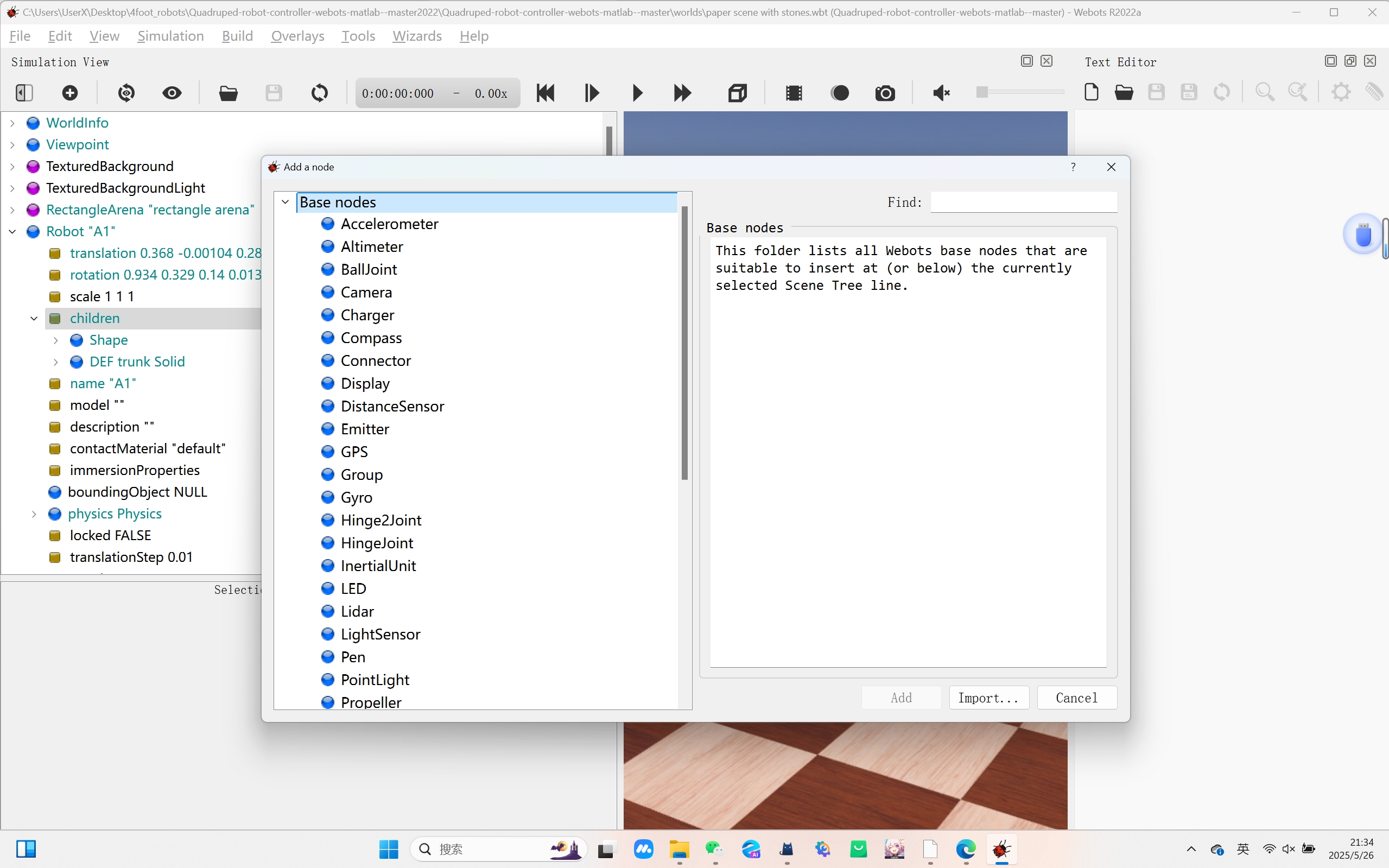
文章摘要: 本文分析了四足机器人A1模型的结构特点和传感器移植方法。模型采用树状层级结构,主体包含躯干Solid和铰链关节HingeJoint,每条腿由胯部、大腿、小腿和足端组成,共3个关节5个Solid。传感器的添加需在关节children节点下完成,涉及关节名称、传感器名称和轴向等多处修改。实践发现:1)Solid内需定义关节名称;2)HingeJoint包含关节参数和驱动装置;3)直接修改p
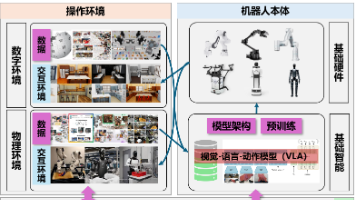
具身智能面临"大脑与身体脱节"的核心挑战:大模型虽具备语义理解能力,却无法感知物理执行限制。早期模仿学习存在泛化能力差、数据依赖性强等问题。当前VLA模型发展呈现三个阶段特征:萌芽期(2023前)尝试语言引入但动作离散化;探索期(2023-2024)采用大模型架构但存在实时性不足;快速发展期(2024起)采用分层架构平衡智能与实时性。模型架构包含观测编码、特征推理和动作解码三大
在深度学习中,注意力机制的灵感来源于人类的视觉注意力。当你看到一张照片时,你不会盯着整张图看,而是会聚焦在某个特定的核心区域(比如图中的一只狗),而忽略背景。在 NLP 的早期(Seq2Seq 模型时代),处理翻译任务时,模型需要把输入的一长串句子压缩成一个固定长度的向量。这就像让你背诵一篇课文,然后只用一个脑细胞记住所有内容,这会导致长句子的信息丢失。注意力机制的引入解决了这个问题:它允许解码器
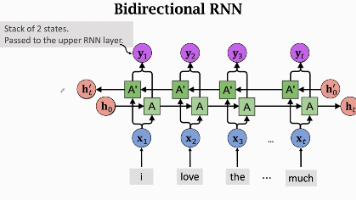
摘要:本文介绍了堆叠RNN和双向RNN的实现方法,展示了PyTorch代码示例。堆叠RNN通过多层LSTM提取特征,最后时间步的隐藏状态作为特征向量。双向RNN通过正向和反向处理拼接输出特征,效果优于单向。文章建议:1)优先使用LSTM而非简单RNN;2)尽可能使用双向结构;3)大数据时堆叠多层;4)小数据时可预训练嵌入层。代码演示了两种RNN的参数设置和前向传播过程,包括隐藏状态初始化和输出处理
Q-Learning是一种基于试错学习的强化学习方法,其核心思想是通过建立Q表记录不同状态下最优动作的价值。算法采用时序差分(TD)学习机制,结合即时奖励和未来预期收益来更新Q值。公式Q(s,a)←Q(s,a)+α[R+γmaxQ(s',a')-Q(s,a)]体现了"新认知=旧认知+学习率×(现实-预期)"的更新逻辑。实验通过5×5迷宫环境验证了Q-Learning的有效性,智
具身智能面临"大脑与身体脱节"的核心挑战:大模型虽具备语义理解能力,却无法感知物理执行限制。早期模仿学习存在泛化能力差、数据依赖性强等问题。当前VLA模型发展呈现三个阶段特征:萌芽期(2023前)尝试语言引入但动作离散化;探索期(2023-2024)采用大模型架构但存在实时性不足;快速发展期(2024起)采用分层架构平衡智能与实时性。模型架构包含观测编码、特征推理和动作解码三大