
写文章




- @2301_79907403
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
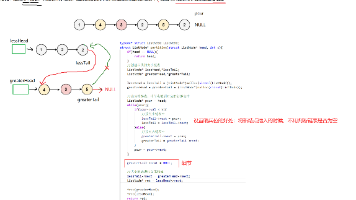
C语言数据结构(4)单链表专题2.单链表的应用
单链表专题(2)单链表的应用
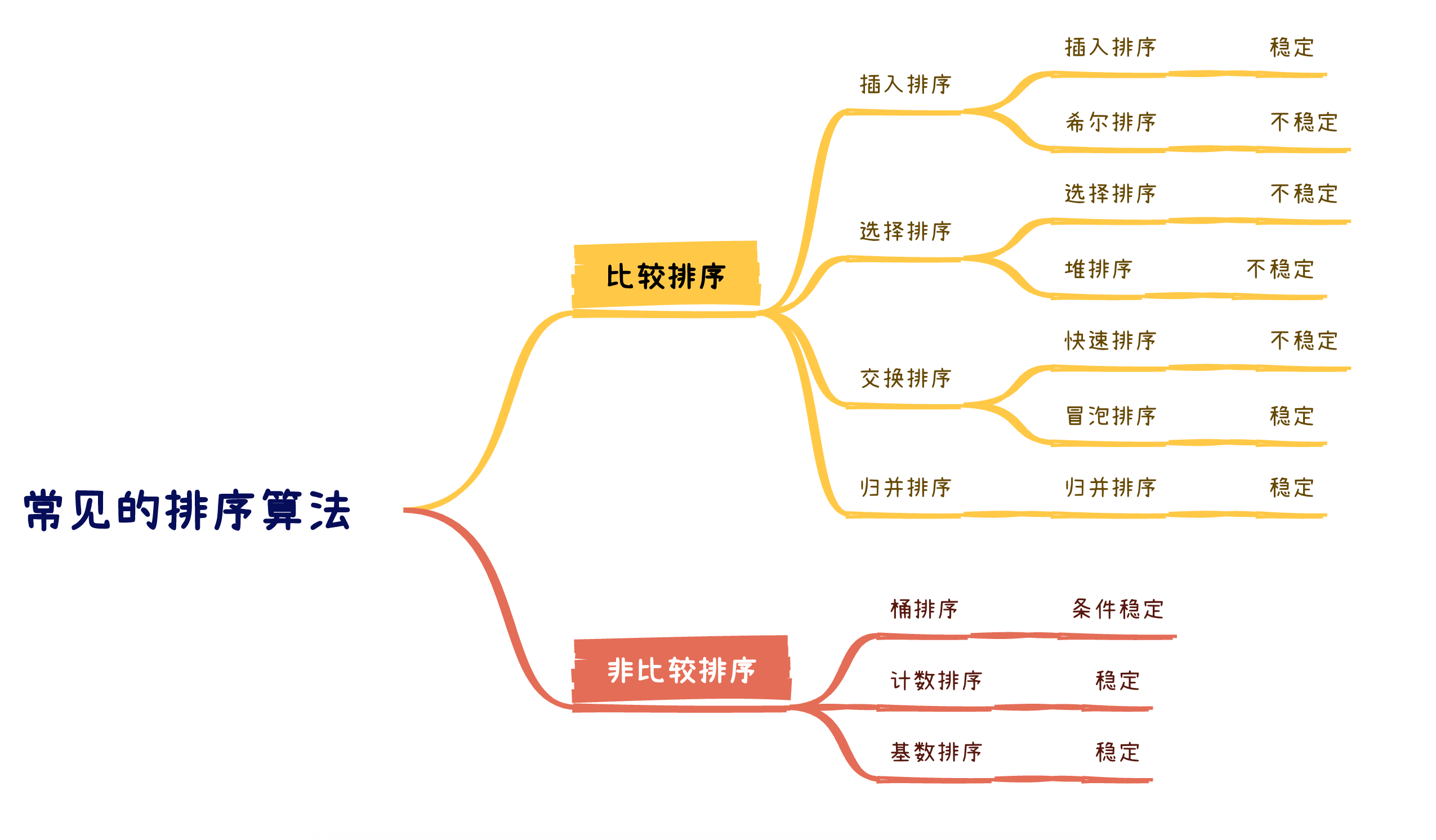
数据结构初阶(12)排序算法—插入排序(插入、希尔)(动图演示)
排序算法—插入排序(插入、希尔)(动图演示)
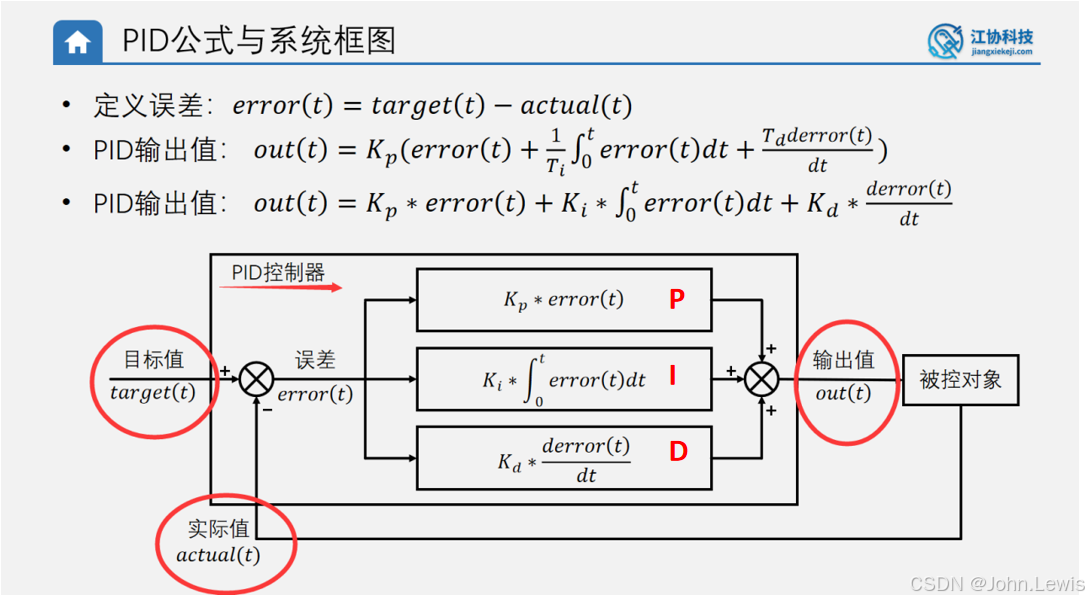
STM32单片机开发(5).PID公式:比例项P、积分项I、微分项D
反观比例项,误差为负,立刻就输出反向的驱动力,比例项的反应是最快的,而且比例项的结果只取决于当前时刻的误差,与历史时刻无关,比例项也不会累计,不会产生饱和的问题,这些就是比例项相对于积分项的优势,因此,积分项一般不单独拿出来用,而是配合比例项使用。此时突然让电机反转,I项累积了较大,只能慢慢减下来,先负向累积,把正向累积抵消掉,然后才能反向累积,产生反向驱动力,这样的话,积分项的输出就慢了,这就是
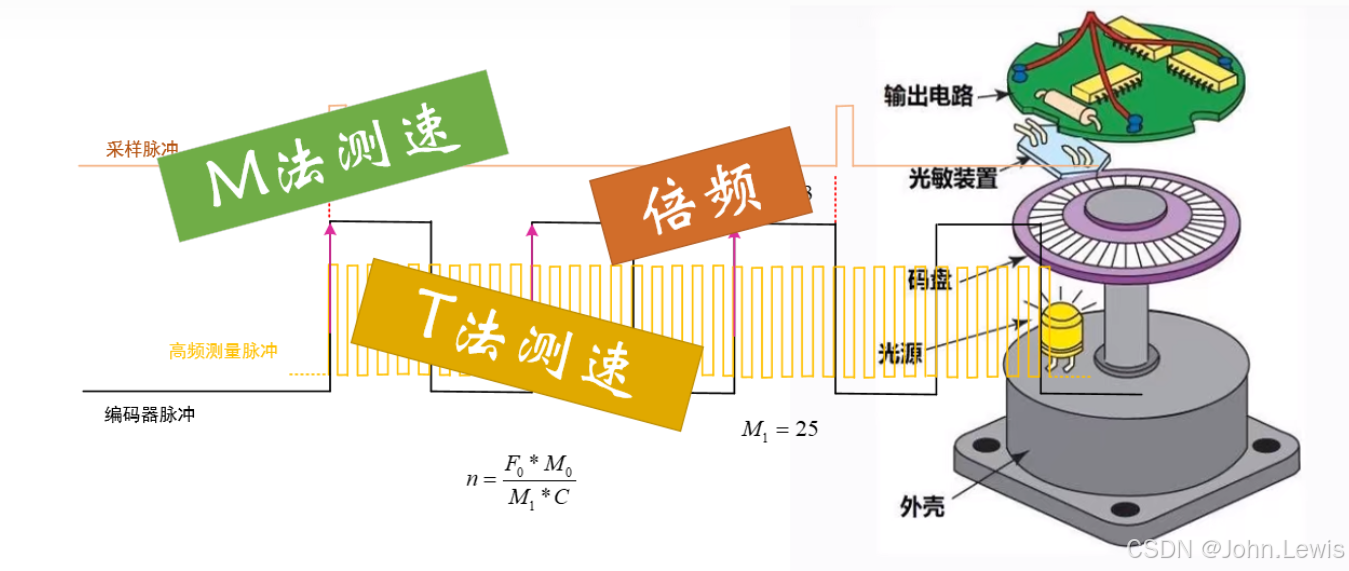
STM32单片机开发(2).编码器计数原理与电机测速原理
编码器,是一种用来测量机械旋转或位移的。它能够测量机械部件在旋转或直线运动时的位移位置或速度等信息,并将其转换成一系列电信号。
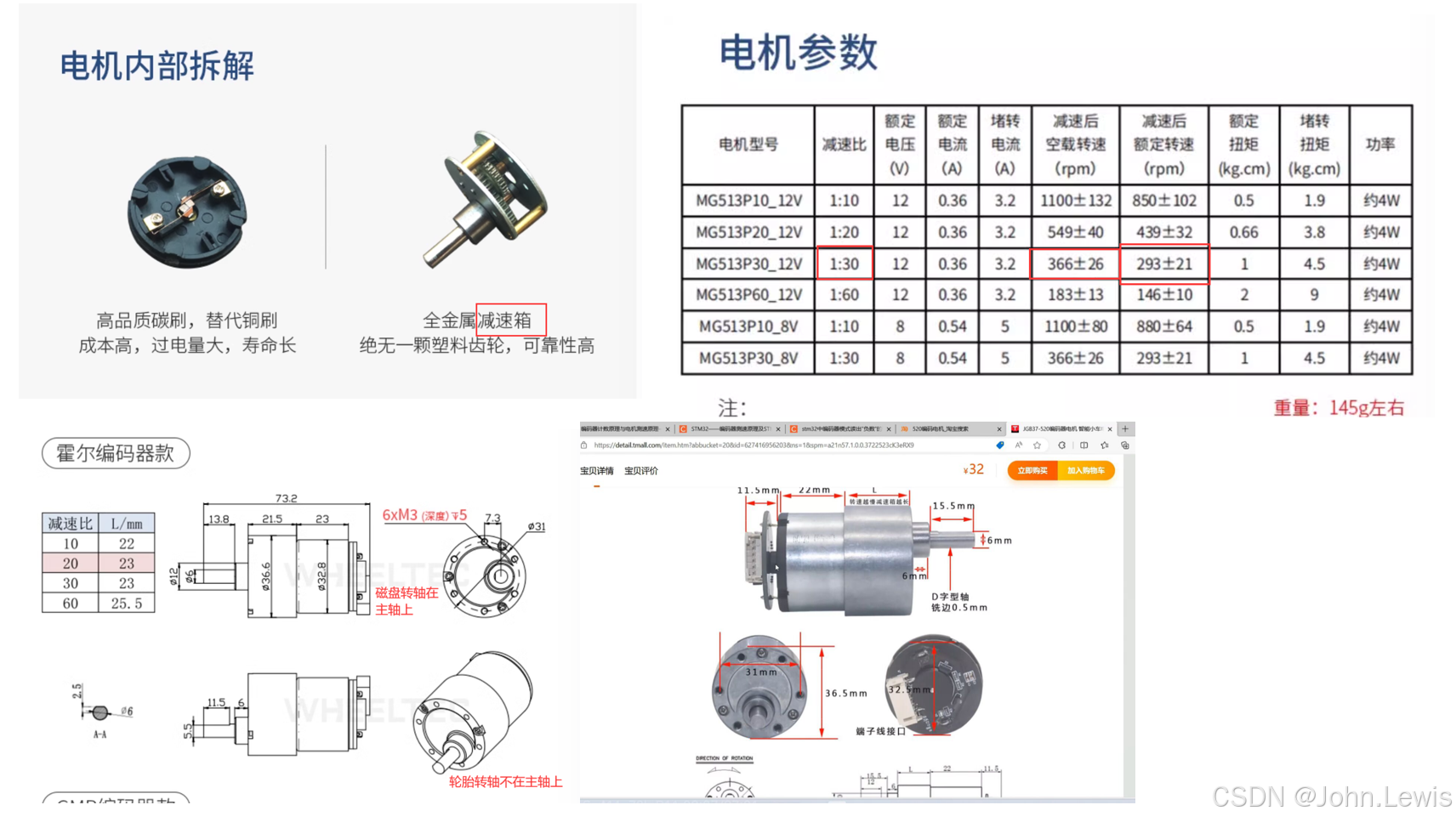
STM32单片机开发(3).MG513(霍尔编码器)电机
(2)额定转速的高低与电机的用途和工作要求有关,例如,用于高速运转的电机(如高速离心机、高速风机等)的额定转速较高,而用于低速运转的电机(如起重机、输送带等)的额定转速较低。②在电机的运行过程中,通过控制电机的负载,使电机的转速保持在额定转速附近,可以提高电机的运行效率和使用寿命。• 交流电机:空载转速也较高,但通常比直流电机低,额定转速则根据电机的极数和电源频率而定,如三相异步电机的额定转速一般
到底了