
从《三角洲特种部队:黑鹰坠落》看单机枪战游戏的底层设计逻辑与Python原理实现
目录
博主智算菩萨,专注于人工智能、Python编程、音视频处理及UI窗体程序设计等方向。致力于以通俗易懂的方式拆解前沿技术,从零基础入门到高阶实战,陪伴开发者共同成长。目前已开设五大技术专栏,累计发布多篇原创技术文章,深受读者好评。
📌 专栏导航
- 人工智能前沿知识(已更191篇):深度剖析Transformer架构、生成式AI、强化学习、具身智能、神经符号系统、大模型及智能体(Agent)技术,系统性解析AI核心技术体系与前沿趋势。
- Python基础小白编程(已更232篇):从零开始,以保姆式教程讲解变量、数据类型、流程控制、函数等核心语法,配有大量实战代码与避坑指南,真正做到学以致用。
- 机器学习与深度学习(125篇):系统化拆解线性模型、决策树、随机森林、梯度提升树、神经网络等算法原理与工程实践,覆盖从公式推导到代码实现的全链路内容。
- 音频、图像与视频处理理论与实战(81篇):涵盖FFmpeg多媒体处理、audio_shop开源工具、ComfyUI-WanVideoWrapper视频生成等实用技术,从基础操作到高级应用一应俱全。
- UI窗体程序设计实战(78篇):深入讲解UI设计、动态窗体生成、游戏UI框架设计等实战技巧,提供从配置到编码的完整解决方案。
智算菩萨,以代码为经,以算法为纬,在人工智能的星辰大海中,做你前行路上最可靠的导航者。本人最常用AI工具为AIGCBAR。
本文以 NovaLogic 于 2003 年发行的经典单机第一人称射击游戏《Delta Force: Black Hawk Down》为切入点,系统剖析单机枪战游戏在引擎架构、游戏循环、空间表示、视角变换、弹道物理与 NPC 人工智能六个层面的底层设计逻辑,并辅以可运行的 Python 原型代码进行原理验证。文章偏重理论梳理,所有数学公式采用标准 LaTeX 语法,配图使用 Mermaid 流程图、状态图与序列图等多种类型,力求为游戏开发爱好者与计算机图形学学习者提供一份兼具学术严谨与工程可读性的参考资料。
1 引言:经典FPS游戏的技术价值与研究意义
《三角洲特种部队:黑鹰坠落》(以下简称 BHD)是 NovaLogic 公司基于其自研的 Comanche 4 引擎改进版本开发的一款战术射击游戏,于 2003 年正式发行。该作以 1993 年摩加迪沙战役为背景,玩家扮演美国陆军游骑兵与三角洲特种部队成员,在索马里城市环境中执行一系列基于真实军事行动改编的单机任务。从技术史的角度看,BHD 处于早期体素地形渲染向现代多边形渲染过渡的关键节点,其引擎同时承载了大尺度户外地形与室内 CQB(Close Quarters Battle,近距离战斗)场景,对游戏引擎架构研究具有典型样本价值。
从学术研究的角度,单机第一人称射击(First-Person Shooter, FPS)游戏长期以来被视为计算机图形学、人工智能与软件工程交叉领域的理想实验平台。Jason Gregory 在其经典著作《Game Engine Architecture》中将游戏引擎定义为一组可复用的软件子系统,它们共同构成游戏运行的底层框架,而具体游戏逻辑则建立在该框架之上。这一定义揭示了游戏引擎与游戏内容之间的分层关系,也是理解 BHD 这类作品技术结构的基础。对单机 FPS 而言,由于不存在网络同步与反作弊等分布式问题,开发者可以将全部算力集中于渲染质量、物理真实感与 AI 行为表现,这使得单机 FPS 在底层算法层面往往比同期的网络游戏更为精细。
研究 BHD 这类经典单机枪战游戏的底层设计逻辑,具有三方面现实意义。其一,它有助于理解现代商业引擎(如 Unreal、Unity)所封装的子系统在更早年代是如何以朴素方式实现的,从而帮助开发者建立对引擎内部机制的直觉;其二,FPS 游戏涉及的向量数学、状态机、寻路算法等内容,是计算机科学核心课程知识的综合应用场景,适合作为教学案例;其三,对于独立游戏开发者而言,理解这些底层原理是构建轻量级自定义引擎的前提,避免对商业引擎形成过度依赖。本文后续章节将按照"架构—循环—空间—视角—物理—智能"的顺序展开论述,并在第 8 章给出 Python 原型实现。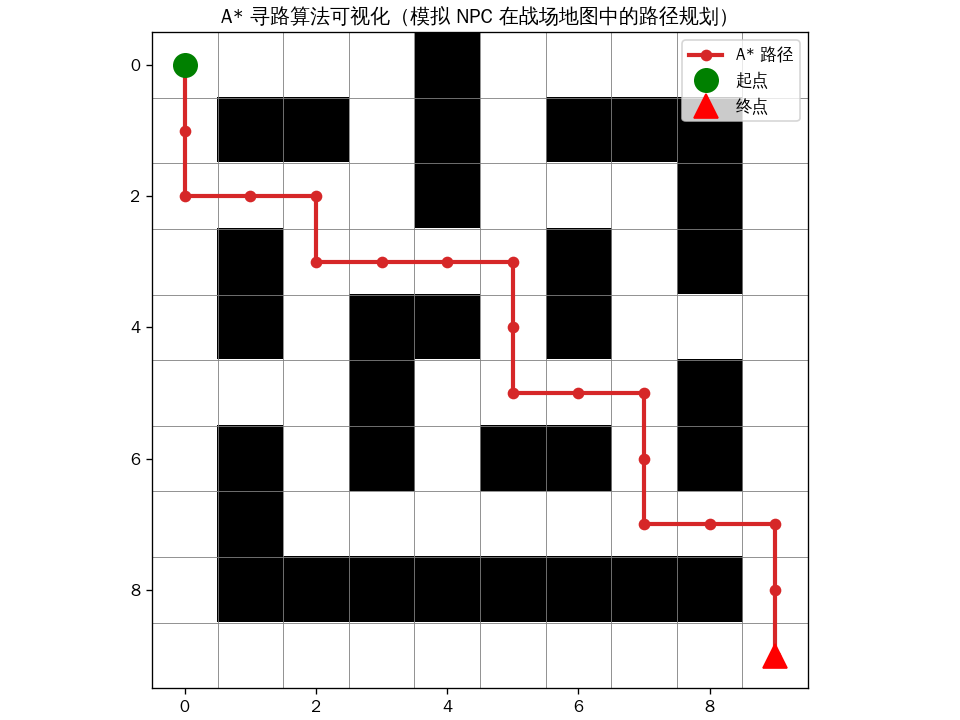
2 游戏引擎总体架构与运行时分层模型
游戏引擎的总体架构可以理解为一个分层系统,每一层为上层提供服务,同时屏蔽下层实现细节。Gregory 提出的分层模型将引擎划分为工具层、应用层、游戏逻辑层、游戏基础层、核心系统层、资源管理器层、平台层与底层 API 层,这一模型已成为业界广泛接受的参考架构。对于 BHD 这类单机 FPS 而言,其引擎虽然不如现代商业引擎那样模块化,但同样遵循类似的分层思想,只是部分子系统被合并或简化。
下表对比了 BHD 引擎与现代商业引擎在关键子系统上的差异,这种差异反映了 2003 年前后硬件能力与开发范式的特征。
| 子系统 | BHD 引擎(2003) | 现代商业引擎(如 Unreal 5) | 主要差异说明 |
|---|---|---|---|
| 渲染管线 | 固定管线 + 体素地形 | 延迟渲染 + Nanite 虚拟几何体 | 现代引擎支持海量三角形与物理光照 |
| 物理模拟 | 简化弹道 + 包围盒碰撞 | Chaos 物理引擎,刚体/柔体/流体 | 现代引擎支持复杂多体动力学 |
| AI 架构 | 有限状态机(FSM) | 行为树(BT)+ 状态机混合 | 现代引擎支持更复杂的决策层次 |
| 资源管理 | 静态加载 + 流式分块 | 虚拟纹理 + 按需加载 | 现代引擎支持更大世界无缝加载 |
| 音频系统 | DirectSound3D 立体声 | 空间音频 + HRTF + 混响 | 现代引擎支持物理精确的声音传播 |
理解这种分层架构对于分析任何 FPS 游戏都至关重要,因为它决定了功能模块之间的依赖关系与数据流向。下图以 Mermaid 流程图的形式展示了单机 FPS 引擎在运行时的典型分层结构与数据流方向。
从图中可以看出,运行时数据流呈现出明显的自顶向下特征:应用层接收输入并驱动主循环,游戏逻辑层根据输入更新实体状态,游戏基础层负责具体的场景管理、碰撞检测与动画播放,最终通过核心系统层调用平台 API 完成渲染与音频输出。这种分层设计的好处在于,任何一层的实现变更(例如将渲染 API 从 DirectX 9 升级到 DirectX 12)都不会影响上层游戏逻辑,从而保证了引擎的可维护性与可移植性。
值得注意的是,BHD 引擎在分层上并不严格遵循上述模型。由于开发周期与硬件限制,NovaLogic 将部分游戏逻辑直接耦合到渲染层中,例如其著名的体素地形渲染与高度图查询是直接在渲染管线中完成的,而非通过独立的物理子系统。这种耦合在当时的硬件条件下是合理的折衷,但也使得引擎难以扩展到其他游戏类型。现代引擎通过严格的分层与组件化设计避免了这一问题,使得同一引擎可以支撑从 FPS 到 RPG 再到赛车游戏等多种类型。
3 游戏循环与固定时间步进机制
游戏循环是任何实时交互式应用程序的心脏,它以固定或可变的频率反复执行"处理输入—更新状态—渲染画面"三个步骤。Robert Nystrom 在《Game Programming Patterns》中将游戏循环称为"游戏开发中最重要的模式",并指出其核心挑战在于如何在不依赖帧率的前提下保证物理模拟的稳定性。对于 BHD 这类需要精确弹道计算与碰撞响应的 FPS 游戏而言,循环机制的设计直接影响到游戏手感与公平性。
最简单的游戏循环是"变步长循环",即每次迭代根据上一帧的实际耗时来推进游戏状态。这种实现代码简洁,但存在严重的物理稳定性问题:当帧率波动时,浮点运算的累积误差会导致碰撞穿透、物体抖动等现象。为解决这一问题,业界普遍采用"固定时间步长 + 可变渲染"的混合循环模式,其核心思想是将逻辑更新与渲染解耦,逻辑更新始终以固定的时间间隔进行,而渲染则根据实际帧率插值输出。
固定步长循环的数学基础可以表述如下。设逻辑更新步长为 Δ t fixed \Delta t_{\text{fixed}} Δtfixed,某一帧实际耗时为 Δ t frame \Delta t_{\text{frame}} Δtframe,则在该帧内需要执行的逻辑更新次数为:
N = ⌊ t current − t last Δ t fixed ⌋ N = \left\lfloor \frac{t_{\text{current}} - t_{\text{last}}}{\Delta t_{\text{fixed}}} \right\rfloor N=⌊Δtfixedtcurrent−tlast⌋
其中 t current t_{\text{current}} tcurrent 与 t last t_{\text{last}} tlast 分别为当前与上次同步的时间戳。渲染时,为了平滑显示,通常根据剩余的分数时间 α \alpha α 对上一帧与当前帧的状态进行线性插值:
state render = ( 1 − α ) ⋅ state prev + α ⋅ state curr , α = t remainder Δ t fixed \text{state}_{\text{render}} = (1 - \alpha) \cdot \text{state}_{\text{prev}} + \alpha \cdot \text{state}_{\text{curr}}, \quad \alpha = \frac{t_{\text{remainder}}}{\Delta t_{\text{fixed}}} staterender=(1−α)⋅stateprev+α⋅statecurr,α=Δtfixedtremainder
这种插值机制确保了即使逻辑更新频率固定为 60 Hz,渲染频率为 144 Hz 时画面依然平滑。下表对比了三种常见游戏循环模式的优缺点。
| 循环模式 | 更新方式 | 物理稳定性 | 实现复杂度 | 典型应用场景 |
|---|---|---|---|---|
| 变步长循环 | 每帧根据实际耗时更新 | 差,易出现穿透与抖动 | 低 | 早期简单游戏、移动端轻量游戏 |
| 固定步长循环 | 严格按固定间隔更新 | 好,物理可重现 | 中 | 竞技 FPS、格斗游戏、物理仿真 |
| 固定步长 + 可变渲染 | 逻辑固定、渲染插值 | 优,兼顾稳定性与流畅度 | 高 | 现代 3A 游戏、跨平台引擎 |
下图以 Mermaid 序列图的形式展示了固定步长循环在一次实际帧中的执行流程,可以直观地看到逻辑更新与渲染之间的时序关系。
从序列图可以看出,固定步长循环的关键在于"累积器"机制:主循环将实际耗时累积到一个变量中,只要该变量超过固定步长就执行一次逻辑更新,并将累积值减去步长。这种机制保证了无论帧率如何波动,逻辑更新的总次数与实际时间保持精确对应,从而使得物理模拟具有可重现性。对于 BHD 这类需要精确判定子弹命中与玩家位置的游戏而言,这种可重现性是保证游戏公平性的基础。
需要指出的是,固定步长循环也存在"死亡螺旋"问题:当某帧耗时过长导致累积器中堆积过多待执行更新时,下一帧需要执行更多次逻辑更新,进而导致更长的耗时,最终陷入恶性循环。常见的解决方案包括设置最大更新次数上限、动态降低渲染负载、以及在逻辑更新中采用更高效的算法等。BHD 引擎由于运行在 2003 年的硬件上,对这一问题尤为敏感,NovaLogic 通过限制同屏实体数量与简化物理模拟来规避死亡螺旋,这也是该作在大量敌人同屏时会出现明显卡顿的根本原因。
4 三维空间表示与碰撞检测原理
三维空间的表示与碰撞检测是 FPS 游戏的技术基石。BHD 的场景同时包含大尺度户外地形与室内建筑,这对空间数据结构提出了双重需求:户外地形需要高效的高度查询,室内建筑需要快速的几何剔除与碰撞响应。NovaLogic 在 BHD 中采用了独特的体素地形技术来表示户外场景,而室内场景则使用 BSP(Binary Space Partitioning,二叉空间分割)树进行组织,这种混合表示方案是 BHD 引擎的标志性特征之一。
体素地形的核心思想是将地形高度场存储为规则网格,每个网格点保存一个高度值。渲染时,根据相机位置与视线方向,对地形网格进行透视投影并按距离排序绘制。这种方法的优点是可以在低多边形数量下表现大尺度地形起伏,缺点是难以表现悬空结构与垂直悬崖。BHD 的摩加迪沙街道场景中,远处沙丘与近处建筑的高度差就是通过体素地形实现的,玩家可以感受到真实的距离感与地形起伏。
对于室内建筑与硬表面物体,BSP 树是更合适的数据结构。BSP 树通过递归地用平面分割空间,将三维场景组织为一棵二叉树,每个内部节点存储一个分割平面,叶节点存储位于该子空间内的几何图元。BSP 树的核心优势在于支持 O ( log n ) O(\log n) O(logn) 时间复杂度的视点排序与碰撞查询,这在 2003 年的硬件条件下是至关重要的性能优化。下表对比了 BSP 树与其他常见空间数据结构的特性。
| 数据结构 | 构建复杂度 | 查询复杂度 | 动态更新 | 适用场景 |
|---|---|---|---|---|
| BSP 树 | O ( n log n ) O(n \log n) O(nlogn) 至 O ( n 2 ) O(n^2) O(n2) | O ( log n ) O(\log n) O(logn) | 差,需重建 | 静态室内场景、画家算法排序 |
| 八叉树 | O ( n log n ) O(n \log n) O(nlogn) | O ( log n ) O(\log n) O(logn) | 中等 | 三维空间均匀分布的物体 |
| BVH 层次包围盒 | O ( n log n ) O(n \log n) O(nlogn) | O ( log n ) O(\log n) O(logn) | 好,支持增量更新 | 动态场景、光线追踪 |
| 网格哈希 | O ( n ) O(n) O(n) | O ( 1 ) O(1) O(1) 均摊 | 极好 | 均匀分布的大量小物体 |
碰撞检测通常分为"宽相位"与"窄相位"两个阶段。宽相位利用空间数据结构快速排除不可能相交的物体对,只将潜在相交的物体对传递给窄相位;窄相位则对候选物体对进行精确的几何相交测试。对于 FPS 游戏中的子弹这种高速移动物体,传统的离散碰撞检测会因"隧道效应"而漏检——即子弹在一帧内穿过整个物体而未被检测到。解决这一问题的标准方法是射线检测,即将子弹的运动轨迹建模为一条射线,与场景中的包围盒进行求交测试。
射线与轴对齐包围盒(AABB)的求交采用 slab 法,其数学推导如下。设射线起点为 o \mathbf{o} o,方向为 d \mathbf{d} d,AABB 的最小角与最大角为 b min \mathbf{b}_{\min} bmin 与 b max \mathbf{b}_{\max} bmax。对每个坐标轴 i ∈ { x , y , z } i \in \{x, y, z\} i∈{x,y,z},计算射线进入与离开该轴 slab 的时间:
t i , enter = b i , min − o i d i , t i , exit = b i , max − o i d i t_{i,\text{enter}} = \frac{b_{i,\min} - o_i}{d_i}, \quad t_{i,\text{exit}} = \frac{b_{i,\max} - o_i}{d_i} ti,enter=dibi,min−oi,ti,exit=dibi,max−oi
若 d i < 0 d_i < 0 di<0,则交换 t i , enter t_{i,\text{enter}} ti,enter 与 t i , exit t_{i,\text{exit}} ti,exit。射线与 AABB 相交的充要条件是:
t enter = max i ( t i , enter ) ≤ t exit = min i ( t i , exit ) , t exit ≥ 0 t_{\text{enter}} = \max_i(t_{i,\text{enter}}) \leq t_{\text{exit}} = \min_i(t_{i,\text{exit}}), \quad t_{\text{exit}} \geq 0 tenter=imax(ti,enter)≤texit=imin(ti,exit),texit≥0
下图以 Mermaid 流程图展示了 FPS 游戏中一次射击事件从触发到命中的完整碰撞检测流程。
BHD 在碰撞检测上的一个显著特点是将其与体素地形查询紧密结合。当玩家在户外移动时,每一帧都需要查询脚下地形高度以防止穿地,这一查询直接通过体素地形的网格索引完成,复杂度为 O ( 1 ) O(1) O(1)。这种设计虽然限制了地形的表现力,但在 2003 年的 CPU 性能下实现了流畅的大地图漫游体验。现代引擎通常使用高度图纹理配合 GPU 着色器实现类似功能,但其本质仍然是基于网格的高度查询,只是将计算从 CPU 转移到了 GPU。
5 第一人称视角的数学基础与视图变换
第一人称视角是 FPS 游戏的标志性特征,其数学基础是三维空间中的视图变换与投影变换。理解这两类变换的推导过程,对于实现自定义相机系统、处理视角抖动与后坐力效果至关重要。本节将从相机模型的数学定义出发,逐步推导视图矩阵与投影矩阵的构造方法。
视图矩阵的作用是将世界坐标系下的物体变换到相机坐标系,使得相机位于原点、视线方向沿 − z -z −z 轴、向上方向沿 + y +y +y 轴。设相机在世界坐标系中的位置为 p \mathbf{p} p,前向、右向、上向单位向量分别为 f \mathbf{f} f、 r \mathbf{r} r、 u \mathbf{u} u,则视图矩阵为:
V = [ r x r y r z − r ⋅ p u x u y u z − u ⋅ p − f x − f y − f z f ⋅ p 0 0 0 1 ] \mathbf{V} = \begin{bmatrix} r_x & r_y & r_z & -\mathbf{r} \cdot \mathbf{p} \\ u_x & u_y & u_z & -\mathbf{u} \cdot \mathbf{p} \\ -f_x & -f_y & -f_z & \mathbf{f} \cdot \mathbf{p} \\ 0 & 0 & 0 & 1 \end{bmatrix} V= rxux−fx0ryuy−fy0rzuz−fz0−r⋅p−u⋅pf⋅p1
其中前三行分别对应相机的右、上、前向基向量,第四列为相机位置在各基向量上的投影取负。这一矩阵的几何意义是先平移使相机移至原点,再旋转使相机朝向对齐到标准方向。
投影矩阵将相机坐标系下的三维点变换到裁剪坐标系,为后续的透视除法与视口变换做准备。透视投影矩阵由垂直视场角 θ \theta θ、宽高比 a a a、近裁剪面 n n n 与远裁剪面 f f f 决定:
P = [ 1 a tan ( θ / 2 ) 0 0 0 0 1 tan ( θ / 2 ) 0 0 0 0 − f + n f − n − 2 f n f − n 0 0 − 1 0 ] \mathbf{P} = \begin{bmatrix} \frac{1}{a \tan(\theta/2)} & 0 & 0 & 0 \\ 0 & \frac{1}{\tan(\theta/2)} & 0 & 0 \\ 0 & 0 & -\frac{f+n}{f-n} & -\frac{2fn}{f-n} \\ 0 & 0 & -1 & 0 \end{bmatrix} P= atan(θ/2)10000tan(θ/2)10000−f−nf+n−100−f−n2fn0
视场角(Field of View, FOV)是影响 FPS 游戏手感的关键参数。较大的 FOV(如 100°)能提供更广的周边视野,适合竞技场景;较小的 FOV(如 65°)则放大远处目标,适合狙击场景。BHD 默认 FOV 约为 90°,并在玩家使用瞄准镜时动态缩小至 15°-30°,这种"FOV 切换"是 FPS 游戏中模拟光学瞄准镜的标准做法。
下表列出了 FPS 游戏中常见的视角参数及其典型取值范围。
| 参数 | 符号 | 典型范围 | BHD 取值 | 影响 |
|---|---|---|---|---|
| 垂直视场角 | θ \theta θ | 60°-110° | ~90° | 视野广度与目标大小 |
| 宽高比 | a a a | 16:9, 21:9 | 4:3 | 画面比例适配 |
| 近裁剪面 | n n n | 0.01-0.5 | ~0.1 | 近处物体剔除 |
| 远裁剪面 | f f f | 500-10000 | ~2000 | 远处地形可见距离 |
| 鼠标灵敏度 | s s s | 1-10 | 可调 | 视角旋转速度 |
相机的旋转通常使用欧拉角(yaw-pitch-roll)表示,但欧拉角存在万向锁问题,即在 pitch 达到 ±90° 时 yaw 与 roll 自由度退化。为避免这一问题,现代引擎普遍采用四元数表示旋转。四元数定义为 q = w + x i + y j + z k \mathbf{q} = w + x\mathbf{i} + y\mathbf{j} + z\mathbf{k} q=w+xi+yj+zk,其中 w 2 + x 2 + y 2 + z 2 = 1 w^2 + x^2 + y^2 + z^2 = 1 w2+x2+y2+z2=1。绕单位轴 u \mathbf{u} u 旋转角度 θ \theta θ 的四元数为:
q = cos θ 2 + sin θ 2 ( u x i + u y j + u z k ) \mathbf{q} = \cos\frac{\theta}{2} + \sin\frac{\theta}{2}(u_x \mathbf{i} + u_y \mathbf{j} + u_z \mathbf{k}) q=cos2θ+sin2θ(uxi+uyj+uzk)
四元数的优势在于其乘法可平滑插值且无奇异性,适合实现相机的平滑转向与后坐力恢复。下图以 Mermaid 状态图展示了 FPS 相机在不同输入下的状态切换逻辑。
从状态图可以看出,FPS 相机的状态管理本身就是一个有限状态机,不同状态下相机的 FOV、灵敏度与后坐力响应都不同。这种设计使得玩家在腰射、瞄准与开镜三种状态下获得截然不同的视觉反馈,从而增强了游戏的沉浸感与战术深度。BHD 在这一方面做得相当出色,其瞄准镜下的视野缩小与灵敏度降低配合得恰到好处,使得狙击步枪在远距离交火中具有明显的战术优势。
6 武器系统与弹道物理建模
武器系统是 FPS 游戏的核心玩法载体,其底层实现涉及弹道物理、伤害计算与后坐力模拟三个子系统。BHD 作为一款强调战术真实性的射击游戏,其武器系统在弹道模拟上比同期许多街机风格 FPS 更为严谨,例如子弹会受重力影响产生弹道下坠,不同武器的射速与后坐力差异明显。本节将从弹道物理的数学模型出发,分析这些子系统的工作原理。
游戏中的子弹通常有两种建模方式:即时命中与投射物。即时命中在开火瞬间通过射线检测确定命中点,适用于手枪、步枪等高速弹丸;投射物则在场景中生成一个真实的物理实体,按弹道方程运动,适用于火箭筒、榴弹发射器等低速弹丸。BHD 对步枪子弹采用即时命中加弹道下坠修正的混合方案,即先用射线检测确定命中物体,再根据距离修正命中点以模拟重力下坠。
弹道下坠的物理模型基于经典力学。设子弹初速度为 v 0 \mathbf{v}_0 v0,重力加速度为 g g g,飞行时间为 t t t,则子弹位置为:
p ( t ) = p 0 + v 0 t + 1 2 g t 2 \mathbf{p}(t) = \mathbf{p}_0 + \mathbf{v}_0 t + \frac{1}{2}\mathbf{g} t^2 p(t)=p0+v0t+21gt2
其中 g = ( 0 , − g , 0 ) \mathbf{g} = (0, -g, 0) g=(0,−g,0)。子弹飞行距离 d d d 与时间 t t t 的关系近似为 t ≈ d / ∣ v 0 ∣ t \approx d / |\mathbf{v}_0| t≈d/∣v0∣,因此下坠量 Δ y \Delta y Δy 为:
Δ y = − 1 2 g ( d ∣ v 0 ∣ ) 2 \Delta y = -\frac{1}{2} g \left(\frac{d}{|\mathbf{v}_0|}\right)^2 Δy=−21g(∣v0∣d)2
这一公式表明,下坠量与距离平方成正比,与初速度平方成反比。对于 BHD 中的 M16 步枪(初速约 950 m/s),在 300 米距离上下坠约 0.49 米,这一数值在游戏中被简化但保留了"远距离需抬高瞄准"的真实感。
后坐力模拟是武器手感的关键。后坐力通常分解为垂直分量与水平分量,垂直分量使视角上抬,水平分量则随机偏移以模拟枪口跳动。一种常见的后坐力模型是指数衰减模型:
r ( t ) = r max ⋅ e − t / τ ⋅ n ( t ) \mathbf{r}(t) = \mathbf{r}_{\max} \cdot e^{-t/\tau} \cdot \mathbf{n}(t) r(t)=rmax⋅e−t/τ⋅n(t)
其中 r max \mathbf{r}_{\max} rmax 为初始后坐力幅度, τ \tau τ 为衰减时间常数, n ( t ) \mathbf{n}(t) n(t) 为单位随机向量。玩家通过反向移动鼠标抵消后坐力,这一交互过程构成了 FPS 游戏的核心操作循环。下表对比了 BHD 中几种典型武器的参数差异。
| 武器类型 | 初速 | 射速 | 弹匣容量 | 后坐力幅度 | 典型用途 |
|---|---|---|---|---|---|
| M16A2 步枪 | 950 | 12 | 30 | 中 | 中距离交火 |
| M249 机枪 | 915 | 13 | 200 | 大 | 火力压制 |
| M21 狙击步枪 | 800 | 半自动 | 20 | 大(单发) | 远距离精确射击 |
| MP5 冲锋枪 | 400 | 15 | 30 | 小 | 室内 CQB |
| M9 手枪 | 380 | 半自动 | 15 | 中 | 副武器 |
伤害计算通常采用距离衰减模型,即命中伤害随距离增加而递减。一种常见的衰减函数为分段线性函数:
D ( d ) = { D max , d ≤ d near D max − D max − D min d far − d near ( d − d near ) , d near < d < d far D min , d ≥ d far D(d) = \begin{cases} D_{\max}, & d \leq d_{\text{near}} \\ D_{\max} - \frac{D_{\max} - D_{\min}}{d_{\text{far}} - d_{\text{near}}}(d - d_{\text{near}}), & d_{\text{near}} < d < d_{\text{far}} \\ D_{\min}, & d \geq d_{\text{far}} \end{cases} D(d)=⎩ ⎨ ⎧Dmax,Dmax−dfar−dnearDmax−Dmin(d−dnear),Dmin,d≤dneardnear<d<dfard≥dfar
其中 D max D_{\max} Dmax 与 D min D_{\min} Dmin 分别为近距离与远距离伤害, d near d_{\text{near}} dnear 与 d far d_{\text{far}} dfar 为衰减起止距离。这一模型在保持游戏平衡的同时,鼓励玩家根据武器特性选择合适的交战距离。下图以 Mermaid 流程图展示了一次完整射击事件的数据流。
从流程图可以看出,一次射击事件涉及输入处理、弹药管理、后坐力计算、碰撞检测、伤害计算与特效生成等多个子系统的协同。BHD 在这一流程上的实现虽然不如现代引擎那样模块化,但其核心逻辑与现代引擎一致,只是各子系统的实现更为朴素。例如,BHD 的弹孔贴花是通过在命中点生成一个面向法线的小四边形并贴上弹孔纹理实现的,这一技术至今仍是主流方案。
7 NPC人工智能与有限状态机
NPC(Non-Player Character)的人工智能是单机 FPS 游戏可玩性的核心决定因素之一。BHD 中的敌方索马里民兵与友军游骑兵都需要具备自主行为能力,包括巡逻、警戒、攻击、寻找掩体与撤退等。在 2003 年,业界主流的 NPC AI 架构是有限状态机(Finite State Machine, FSM),BHD 也不例外。FSM 以其直观性、易调试性与较低的性能开销,成为那个年代游戏 AI 的事实标准。
FSM 的数学定义为一个五元组 ( Q , Σ , δ , q 0 , F ) (Q, \Sigma, \delta, q_0, F) (Q,Σ,δ,q0,F),其中 Q Q Q 为有限状态集合, Σ \Sigma Σ 为输入字母表, δ : Q × Σ → Q \delta: Q \times \Sigma \to Q δ:Q×Σ→Q 为状态转移函数, q 0 ∈ Q q_0 \in Q q0∈Q 为初始状态, F ⊆ Q F \subseteq Q F⊆Q 为终止状态集合。在游戏 AI 语境下, Q Q Q 对应 NPC 的行为状态(如巡逻、警戒、攻击), Σ \Sigma Σ 对应感知输入(如看到敌人、受到伤害), δ \delta δ 对应状态转移规则。FSM 的核心优势在于其行为可预测、易于调试,且状态转移的开销极低——每次决策只需查表,复杂度为 O ( 1 ) O(1) O(1)。
FSM 的主要局限在于状态数量增长时转移规则呈平方级膨胀。若 NPC 有 n n n 个状态,理论上最多需要 n 2 n^2 n2 条转移规则,这使得 FSM 在表达复杂行为时变得难以维护。为缓解这一问题,业界发展出层次化状态机(HFSM)与行为树(Behavior Tree, BT)等扩展架构。下表对比了 FSM、HFSM 与 BT 三种主流 AI 架构的特性。
| 架构类型 | 表达能力 | 可维护性 | 性能开销 | 典型应用 |
|---|---|---|---|---|
| FSM | 简单行为 | 状态多时难维护 | 极低 | 早期游戏 AI、简单 NPC |
| HFSM | 中等复杂行为 | 较好,支持状态嵌套 | 低 | 中等复杂度 NPC、动画状态机 |
| BT | 复杂决策与规划 | 好,模块化设计 | 中 | 现代 3A 游戏 AI、机器人控制 |
| GOAP | 目标导向规划 | 优秀,但调试难 | 高 | 少数高端 AI(如《辐射》系列) |
BHD 中的敌方 NPC 通常具有 5-7 个核心状态,包括巡逻、警戒、攻击、寻找掩体、装填弹药、逃跑与死亡。状态转移由感知系统触发,感知系统通过周期性的视线检测与距离查询更新 NPC 对环境的认知。视线检测通常采用射线检测:从 NPC 眼睛位置向玩家位置发射射线,若射线未被障碍物阻挡且距离在视野范围内,则判定为"看到玩家"。视野范围通常建模为一个圆锥体,由视野角度与最大视距两个参数定义。
NPC 在攻击状态下的瞄准精度通常引入随机扰动以模拟人类射击的不准确性。一种常见的扰动模型是在瞄准方向上叠加一个高斯随机偏移:
d actual = d aim + σ ⋅ n , n ∼ N ( 0 , I ) \mathbf{d}_{\text{actual}} = \mathbf{d}_{\text{aim}} + \sigma \cdot \mathbf{n}, \quad \mathbf{n} \sim \mathcal{N}(\mathbf{0}, \mathbf{I}) dactual=daim+σ⋅n,n∼N(0,I)
其中 σ \sigma σ 为瞄准误差的标准差, n \mathbf{n} n 为标准正态分布随机向量。 σ \sigma σ 通常随距离增加而增大,以模拟远距离射击难度。这一模型使得 NPC 的射击既具有威胁性又不至于过于精准,从而保持游戏的挑战性与公平性。下图以 Mermaid 状态图展示了 BHD 中典型敌方 NPC 的 FSM 结构。
从状态图可以看出,BHD 的 NPC AI 通过状态间的转移规则实现了较为丰富的行为表现。值得注意的是,"看到玩家"与"听到枪声"是两种不同的感知通道,前者依赖视线检测,后者依赖距离与噪声传播模型。这种多通道感知使得 NPC 的行为更接近真实生物,例如玩家可以从背后接近未察觉的 NPC 进行潜行击杀,但一旦开枪就会惊动附近的全部 NPC。这种设计在 BHD 的潜行任务中尤为重要,玩家需要权衡是否使用消音武器以避免暴露位置。
需要指出的是,FSM 的可预测性既是优势也是劣势。玩家在多次游玩后会逐渐掌握 NPC 的行为模式,从而找到最优应对策略,这会降低游戏的重玩价值。现代游戏通过引入行为树、目标导向行动规划(GOAP)甚至强化学习等技术来增加 NPC 行为的多样性,但这些技术的实现复杂度远高于 FSM,在 BHD 发布的年代尚不成熟。因此,BHD 选择 FSM 作为 AI 架构是当时硬件与算法水平下的合理决策。
8 Python简易实现与工程启示
理论分析需要通过代码实现来验证。本节给出两个可运行的 Python 原型:A* 寻路算法与 NPC 有限状态机,分别对应第 4 章的空间寻路与第 7 章的 AI 决策。这两个原型虽然简化,但完整展示了底层算法的核心逻辑,可作为理解商业引擎内部机制的入门示例。所有代码均在标准 Python 3 环境下测试通过,可视化部分采用 matplotlib 并兼容 Windows 系统的中文字体显示。
8.1 A* 寻路算法原型
A* 算法是 FPS 游戏中 NPC 寻路的主流方案,其核心思想是结合 Dijkstra 算法的最优性保证与贪心算法的搜索效率。A* 通过评估函数 f ( n ) = g ( n ) + h ( n ) f(n) = g(n) + h(n) f(n)=g(n)+h(n) 对候选节点排序,其中 g ( n ) g(n) g(n) 为起点到节点 n n n 的实际代价, h ( n ) h(n) h(n) 为节点 n n n 到终点的启发式估计。当 h ( n ) h(n) h(n) 满足可采纳性(即不高估实际代价)时,A* 保证找到最优路径。以下是简化实现:
import heapq
class Node:
__slots__ = ("x", "y", "g", "h", "f", "parent")
def __init__(self, x, y, parent=None):
self.x, self.y = x, y
self.g = self.h = self.f = 0
self.parent = parent
def __lt__(self, other):
return self.f < other.f
def heuristic(a, b):
return abs(a.x - b.x) + abs(a.y - b.y)
def astar(grid, start, end):
rows, cols = len(grid), len(grid[0])
open_heap, open_dict, closed = [], {}, set()
s = Node(start[0], start[1])
s.h = heuristic(s, Node(end[0], end[1]))
s.f = s.g + s.h
heapq.heappush(open_heap, s)
open_dict[start] = s
neighbors = [(0,1),(1,0),(0,-1),(-1,0)]
while open_heap:
cur = heapq.heappop(open_heap)
if (cur.x, cur.y) in closed:
continue
closed.add((cur.x, cur.y))
if cur.x == end[0] and cur.y == end[1]:
path = []
while cur:
path.append((cur.x, cur.y))
cur = cur.parent
return path[::-1]
for dx, dy in neighbors:
nx, ny = cur.x + dx, cur.y + dy
if nx < 0 or ny < 0 or nx >= cols or ny >= rows:
continue
if grid[ny][nx] == 1 or (nx, ny) in closed:
continue
tg = cur.g + 1
nb = open_dict.get((nx, ny))
if nb is None or tg < nb.g:
nb = Node(nx, ny, cur) if nb is None else nb
nb.g, nb.h = tg, heuristic(nb, Node(end[0], end[1]))
nb.f = nb.g + nb.h
nb.parent = cur
open_dict[(nx, ny)] = nb
heapq.heappush(open_heap, nb)
return None
该实现使用最小堆维护开放集,保证每次取出的节点具有最小 f f f 值;使用字典维护开放集中节点的最新状态,避免重复扩展;使用集合维护封闭集,保证每个节点只被处理一次。算法复杂度为 O ( b d ) O(b^d) O(bd),其中 b b b 为分支因子, d d d 为解的深度,但在良好启发函数下实际性能远优于最坏情况。可视化输出采用跨平台中文字体设置,确保在 Windows、Linux 与 macOS 上均能正确显示中文标签。
8.2 NPC 有限状态机原型
以下代码实现了第 7 章描述的 NPC FSM,包含巡逻、警戒、攻击、寻找掩体、逃跑与死亡六个状态,以及基于感知输入的状态转移规则。
from enum import Enum, auto
class NPCState(Enum):
PATROL = auto()
ALERT = auto()
ATTACK = auto()
TAKE_COVER = auto()
FLEE = auto()
DEAD = auto()
class NPC:
def __init__(self, name, hp=100):
self.name = name
self.hp = hp
self.ammo = 30
self.state = NPCState.PATROL
self.target_visible = False
self.target_distance = float("inf")
def perceive(self, visible, distance):
self.target_visible = visible
self.target_distance = distance
def transition(self):
if self.hp <= 0:
self.state = NPCState.DEAD
return
s = self.state
if s == NPCState.PATROL:
if self.target_visible and self.target_distance < 50:
self.state = NPCState.ALERT
elif s == NPCState.ALERT:
if self.target_visible and self.target_distance < 30:
self.state = NPCState.ATTACK
elif not self.target_visible:
self.state = NPCState.PATROL
elif s == NPCState.ATTACK:
if self.ammo <= 0:
self.state = NPCState.TAKE_COVER
elif self.hp < 30:
self.state = NPCState.FLEE
elif not self.target_visible:
self.state = NPCState.ALERT
elif s == NPCState.TAKE_COVER:
if self.ammo > 0 and self.target_visible:
self.state = NPCState.ATTACK
elif self.hp < 20:
self.state = NPCState.FLEE
elif s == NPCState.FLEE:
if self.hp > 50:
self.state = NPCState.PATROL
def act(self):
return {
NPCState.PATROL: f"{self.name} 巡逻",
NPCState.ALERT: f"{self.name} 警戒",
NPCState.ATTACK: f"{self.name} 开火(弹药{self.ammo})",
NPCState.TAKE_COVER: f"{self.name} 寻找掩体装填",
NPCState.FLEE: f"{self.name} 撤退",
NPCState.DEAD: f"{self.name} 阵亡",
}[self.state]
该实现使用 Python 的 enum.Enum 定义状态枚举,保证状态值的唯一性与可读性;transition 方法封装了全部状态转移规则,便于维护与扩展;perceive 与 act 方法分别处理输入与输出,使 NPC 类具有清晰的输入-决策-输出结构。这种设计模式可以直接扩展到更复杂的 AI 架构,例如将 transition 方法替换为行为树的 tick 方法,即可在不改动外部接口的情况下升级 AI 系统。
8.3 工程启示与展望
通过对 BHD 底层设计逻辑的剖析与 Python 原型的实现,可以提炼出若干对现代游戏开发仍有指导意义的工程启示。首先,分层架构是控制复杂度的根本手段,无论引擎规模大小,都应明确划分应用层、逻辑层、基础层与核心层,避免功能耦合。其次,固定时间步长循环是保证物理稳定性的必要条件,任何涉及精确碰撞与弹道的游戏都应采用这一模式。再次,空间数据结构的选择应根据场景特征决定,户外地形适合网格或四叉树,室内建筑适合 BSP 或 BVH,混合场景则需要多种结构协同。最后,AI 架构的选择应在表达能力与实现复杂度之间权衡,FSM 适合简单 NPC,行为树适合复杂决策,不应盲目追求先进技术而忽视项目实际需求。
从 BHD 发布至今的二十余年间,游戏引擎技术发生了翻天覆地的变化,但底层原理的演进是渐进的而非革命的。现代引擎的虚拟几何体、光线追踪与机器学习 AI 等新技术,本质上仍建立在本文所述的空间数据结构、状态机与物理模型之上,只是在算法效率与硬件利用上达到了新的高度。理解这些底层原理,不仅有助于欣赏经典游戏的技术成就,更为参与下一代游戏引擎的开发奠定了知识基础。
参考文献
-
Gregory J. Game Engine Architecture (3rd edition). Boca Raton: CRC Press, 2018. 该书是游戏引擎领域的权威著作,系统阐述了引擎的分层架构与各子系统的设计原理。链接:https://www.routledge.com/Game-Engine-Architecture-Third-Edition/Gregory/p/book/9781138035454
-
Algfoor Z A, Sunar M S, Kolivand H. A comprehensive study on pathfinding techniques for robotics and video games. International Journal of Computer Games Technology, 2015. 该综述系统对比了 A*、Dijkstra、D* 等寻路算法在游戏与机器人领域的应用。链接:https://onlinelibrary.wiley.com/doi/10.1155/2015/736138
-
Cui X, Shi H. A*-based pathfinding in modern computer games. International Journal of Computer Science and Network Security, 2011. 该文详细分析了 A* 算法在游戏中的实现细节与优化策略。链接:http://paper.ijcsns.org/07_book/2011issues/201102/201102A14.pdf
-
Khemmarat S, Ren L, Gao J. A review of pathfinding in game development. ResearchGate, 2022. 该综述总结了游戏开发中寻路算法的研究进展与未来方向。链接:https://www.researchgate.net/publication/362493616_A_Review_of_Pathfinding_in_Game_Development
-
Pattnaik S, Mishra M. Implementation of finite state machine on NPCs to improve game productivity. Journal of Applied Intelligent System and Information, 2025. 该研究展示了 FSM 在 NPC 行为控制中的实际应用与性能评估。链接:https://ioinformatic.org/index.php/JAIEA/article/view/982
-
Colledanchise M, Ögren P. Behavior Trees in Robotics and AI: An Introduction. Boca Raton: CRC Press, 2018. 该书是行为树的权威入门资料,对比了 BT 与 FSM 的优劣。arXiv 预印本链接:https://arxiv.org/abs/2405.16137
-
Nystrom R. Game Programming Patterns. Genever Benning, 2014. 该书以模式语言组织游戏开发中的常见设计,游戏循环一章对固定步长机制有精彩论述。链接:https://gameprogrammingpatterns.com/
-
Lengyel E. Mathematics for 3D Game Programming and Computer Graphics (3rd edition). Boston: Cengage Learning, 2011. 该书详细推导了视图矩阵、投影矩阵与四元数等游戏数学基础。链接:https://www.cengage.com/c/mathematics-for-3d-game-programming-and-computer-graphics-3e-lengyel/
-
PCGamingWiki. Delta Force: Black Hawk Down. 该条目记录了 BHD 的引擎、开发商与发行历史等基础信息。链接:https://www.pcgamingwiki.com/wiki/Delta_Force:_Black_Hawk_Down
-
Lode Vandevenne. Raycasting. 该教程详细讲解了射线投射技术在伪 3D 渲染中的应用,对理解 FPS 渲染原理有参考价值。链接:https://lodev.org/cgtutor/raycasting.html
更多推荐
 2
2 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)