
50分26秒!人形机器人正式跑赢人类世界纪录
2026年北京亦庄人形机器人半程马拉松赛事成为全球具身智能领域里程碑。赛事规模较2025年扩大5倍,吸引300余台机器人参赛,冠军"闪电"机器人以50分26秒打破人类纪录。核心技术突破包括液冷散热系统、高扭矩电机和高密度电池,推动自主导航占比提升至38%。赛事通过创新规则设计(如1.2倍加权系数)引导技术路线,促进产学研协同和供应链成熟。中国在标准制定和产业化方面取得领先,荣耀
2026年4月19日,北京亦庄人形机器人半程马拉松赛事在全球科技界引发广泛关注。这场汇聚300余台机器人、26个品牌的赛事,不仅见证了人形机器人以50分26秒的成绩超越人类半程马拉松世界纪录的历史性突破,更成为检验全球人形机器人技术成熟度的关键平台。从2025年首届赛事的蹒跚起步到2026年的全面超越,这场赛事的跨越式发展折射出中国在具身智能领域的领先地位,并为全球人形机器人产业从实验室走向规模化应用提供了重要推动力。本文将从赛事概况、技术突破、参赛格局与产业影响四个维度,全面解析这场具身智能领域的里程碑式赛事。
一、赛事概况与规则创新
1. 赛事规模与赛道升级
2026年北京亦庄人形机器人半程马拉松赛事于4月19日举行,赛道全长21.0975公里,起点设于北京亦庄南海子公园南门,终点为经开区国家信创园,途经文博大桥、泡桐大道等标志性路段。与2025年首届赛事相比,本届赛事规模实现近5倍增长,参赛队伍数量从约20支增至超百支,覆盖全国13个省份及德国、法国、葡萄牙、巴西等5支国际队伍。
赛道设计显著提升技术挑战性,首次融入南海子公园生态路段,整合平地、坡道、狭窄路段等10余种地形,包含22个弯道及多个接近90°的急转,对机器人的路径规划与动态平衡能力提出更高要求。赛事还设置了7个标准化补给站与"机器人救护车",可提供换电、检修、应急复位等服务,确保比赛顺利进行。
2. 规则设计与创新考量
赛事规则在2025年基础上进行全面升级,主要体现在以下方面:
混合计时与加权系数机制:赛事创新设置自主导航与遥控两种参赛方式,采用"混合计时、统一排名"的赛制。自主导航组机器人全程自主完成比赛,仅在换电池、换备用机器人或跌倒无法自主恢复时允许人工干预;遥控组机器人则由队员在指定跟随车内操作。为鼓励自主技术研发,遥控组的净计时成绩需乘以1.2的加权系数,同时设置严格罚时规则。
罚时规则精细化:赛事制定了严格的罚则细则,包括:
- 补给站外更换电池首次罚时5分钟,后续每次递增
- 更换机器人最多2次且分别罚时15分钟和20分钟
- 自主导航组违规人工干预超3次将自动转为遥控组核算成绩
起跑与赛道管理创新:赛事采用流水线式分批单发起跑机制,每台机器人间隔30秒出发,确保赛道安全。机器人需遵循"右侧行进、左侧超车"原则,跟随车辆需保持5米以上安全间距,避免不同参赛模式队伍间的相互干扰。
3. 奖项设置与评价体系
赛事奖项设置兼顾速度与技术创新,除竞速冠亚季军和完赛奖外,还设立最佳续航奖、最佳步态控制奖、最佳设计奖等单项技术奖,全面评估参赛机器人的综合性能。这种多元化的评价体系旨在引导机器人企业从单一速度竞争转向综合技术能力的提升。
二、技术突破与性能飞跃
1. 冠军表现与技术里程碑
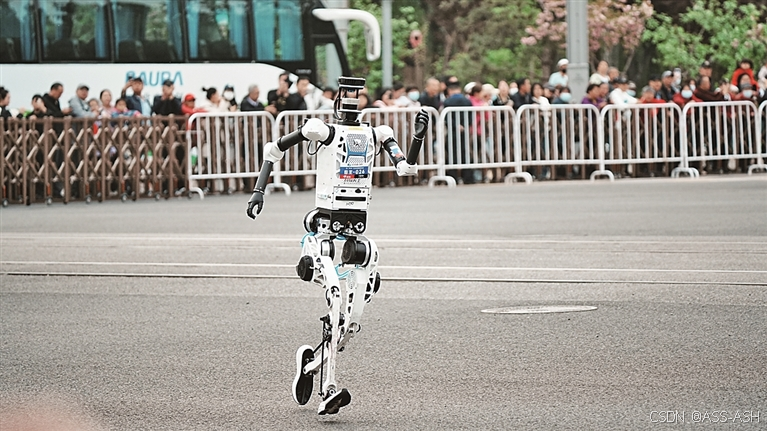
2026年赛事最大的亮点是齐天大圣队的"闪电"机器人以50分26秒的净用时成绩夺冠,不仅大幅超越了人类半程马拉松56分42秒的世界纪录,更代表人形机器人首次在公开、长距离、真实道路场景中跑赢人类顶级运动员。
这一突破性表现背后是三项核心技术的质的飞跃:
- 高功率液冷散热系统:机器人后背装载高功率液泵,可实现每分钟超4升的换热流量,有效解决了电机长时间运转的发热难题。华科冷芯提供的高速悬浮泵采用液磁耦合悬浮技术,转子实现全自由度无接触悬浮,转速可达2万转以上,流量6L/min,尺寸仅30mm,重量不到100g,能将核心温度从100℃降至60℃以下。
- 高扭矩密度电机:峰值扭矩可达400牛米的一体化关节模组,扭矩密度达200N·m/kg以上,支持长时间高速奔跑不衰减。
- 高能量密度电池:400Wh/kg能量密度电池,实现21公里单次续航,解决了机器人长距离奔跑的能源瓶颈。
2. 自主导航技术的规模化应用
2026年赛事中,自主导航参赛队伍占比高达38%,较2025年以遥控为主的参赛模式实现重大转变。这种转变主要体现在:
- 路径规划能力:机器人能自主规划最优路线,遇到行人、障碍物时实时调整步态规避
- 动态平衡控制:毫秒级动态平衡算法,可在城市道路、红绿灯、复杂路况下稳定奔跑
- 多传感器融合:摄像头、激光雷达、IMU(惯性测量单元)等传感器的精准融合,实现环境感知与自身状态的实时捕捉
3. 完赛率与可靠性提升
赛事成绩数据反映了人形机器人技术的显著进步:
- 完赛率:从2025年的30%提升至90%以上
- 平均速度:从2025年冠军的2小时40分提升至50分钟级别,速度提升近3倍
- 故障率:摔倒率大幅下降,多数机器人一次充电即可完成21公里全程
- 稳定性:冠军机器人全程零故障,零失效,展现出高度可靠的工业级品质
三、参赛格局与技术创新
1. 企业队伍的技术路线与商业化进展
2026年赛事吸引了多家头部企业的参与,各企业展示了不同的技术路线和商业化进展:
荣耀终端:作为首个派出机器人参赛的手机巨头,荣耀共派出10支队伍,包括"闪电"和"元气仔"两款机器人。其中6支"闪电"机器人队伍包揽赛事前六名,展示了强大的技术实力。荣耀计划2026年启动小批量量产,与蓝思科技合作,蓝思科技在湖南长沙浏阳经开区永安园区和泰国基地已形成年产50万台的产能,目标通过京东平台独家开售。
北京人形机器人创新中心:作为国家地方共建具身智能机器人创新中心,其天工Ultra系列机器人在2025年夺冠后,2026年进一步升级,搭载自研的高扭矩一体化关节和全新的液冷散热系统,解决了高速运动下的发热问题。该中心还向多所高校交付了15台"具身天工3.0"与"具身天工Ultra"通用机器人本体,支持高校团队进行二次开发。
宇树科技:其H1人形机器人在2026年春晚展示了后空翻、侧手翻等高难度动作,内部测试中已取得半马50多分钟的成绩。宇树科技创始人王兴兴表示,"具身智能的ChatGPT时刻可能在未来两三年内到来"。公司已完成IPO辅导并计划2026年上半年上市,目标出货1-2万台,成本控制在10万元以内,主打工业场景应用。
国家地方共建人形机器人创新中心:首次参赛,派出国地飞跃队、国地探索队和国因远征队三支队伍,参赛机型为面向通用轻载场景的灵龙2.0,具备出色的动态平衡与全身协同控制能力,搭载高性能算力模块,支持复杂环境下的运动控制验证与具身智能算法研究。
2. 高校团队的技术创新与人才培养
北京大学:机器联觉团队基于"天工"平台进行二次开发,实现了从仿真训练到真机验证的跑步算法落地,利用实验室团队提出的机器联觉技术提升机器人信息承载交互能力。该团队计划基于本次比赛经验,开展多模态无线通感联觉与具身智能深度融合的研究。
清华大学:自动化系研究员赵明国团队关注机器人在复杂地形中的能力,提出去噪世界模型学习(DWL)技术,已在小星(XBot-S)及小星max(XBot-L)上验证,实现了端到端RL和零样本仿真到现实转换,使机器人在包括雪地倾斜面、楼梯等地形上稳定行走,抵抗外部干扰。
北京航空航天大学:由陶永副教授、任帆博士后指导的"未来机域-智能凌峰队"基于天工ULTRA2026机器人进行二次开发,利用Tienkunglab框架与Ultra人形机器人本体进行快速训练、快速部署,通过Sim2real端侧自适应微调实现稳定运控。
北京理工大学:"北理智行者"赛队由机电学院"集群博弈与协同控制学科组"领队,基于天工机器人平台进行二次开发,仅用一个月时间就完成了从仿真训练到真机部署的全流程训练,开发出可在真机上部署的走跑模型。
3. 国际参赛队伍的技术特点与挑战
德国慕尼黑大学"挽救计划"赛队:使用天工Ultra平台并进行了二次开发,关注机器人动态平衡与抗冲击能力。该赛队首席人工智能架构师Simon Armleder表示,中国机器人研发环境比想象中更为庞大和活跃,北京等地形成了多个产业聚集区,汇聚大量初创企业,专注于人形机器人开发。该赛队面临的主要挑战是设备成本较高,预算限制成为参加下一届比赛的主要障碍。
法国巴黎萨克雷大学赛队:同样基于"天工"平台进行二次开发,但未使用本国研发的机器人。该赛队负责人艾蒂安表示,他们实验室确实在研发自己的机器人,但目前还没有完成,因此选择宇树G1机器人作为测试平台。该团队展示了压力传感鞋垫技术,通过它可以感知脚部的姿态,了解脚在运动时的状态和动作,为步态优化提供数据支持。
巴西、葡萄牙等国际队伍:虽然具体技术细节较少,但他们的参与表明北京亦庄赛事已成为全球人形机器人技术交流的重要平台,促进了国际技术合作与创新。
四、赛事规则与产业影响
1. 加权机制的技术引导作用
赛事规则中的1.2倍加权系数对参赛队伍的技术路线选择产生了显著影响。北京经开区管委会副主任李全表示,这一设计是基于行业专家论证、参赛单位调研反馈及多轮实战测试数据,旨在通过经济惩罚(时间乘以系数)引导企业优先发展自主导航技术,而非依赖人工遥控。
规则效果体现在三个方面:
- 自主导航比例提升:从2025年遥控为主到2026年38%队伍选择自主导航,显示出规则对技术路线的引导作用
- 参赛策略转变:部分队伍从遥控转向自主导航开发,以避免1.2倍的加权惩罚
- 技术优化方向调整:为减少罚时,企业更加注重电池续航能力提升和散热系统优化,如液冷技术的广泛应用
2. 产业推动与技术成熟
赛事已成为具身智能产业从"开发态"进入"部署态"的关键推动力。通过"以赛促研、以赛促产、以赛促用",赛事加速了人形机器人从实验室走向产业场景的进程:
核心技术验证平台:赛事为高扭矩密度电机、液冷技术、高能量密度电池等核心技术提供了真实场景验证机会。例如,华科冷芯的液冷技术在赛事中得到验证后,已实现月产数千至万级的交付能力,应用于AIDC数据中心、商业航天、新能能源等领域。
产学研协同创新:赛事促进了企业、高校和科研院所的深度合作。北京人形机器人创新中心向高校交付15台机器人本体,形成"整机厂商+科研机构+开发者社区"的多元竞争格局。这种合作模式有效降低了高校团队的技术门槛,加速了创新成果的转化。
供应链成熟度提升:赛事规模扩大直接促进了核心零部件的量产和供应链成熟。例如,液冷散热技术国产化率已提升至70%以上,成为人形机器人散热的主流方案。同时,赛事推动了减速器、传感器等核心部件的国产化替代,降低了整机成本。
3. 政策支持与商业化加速
北京经开区推出的"首试首用"政策为赛事技术验证提供了重要支持。根据《北京经济技术开发区关于推动具身智能机器人创新发展的若干措施》,对获得北京市机器人未定型创新产品首试首用奖励的项目,给予1:1配套资金支持;对纳入北京市首台(套)重大技术装备目录的机器人产品,每台(套)给予100万元支持。
政策效果主要体现在:
- 降低试错成本:通过风险补偿支持,降低了企业测试新技术的成本和风险
- 加速技术迭代:赛事成为技术迭代的"加速器",如天工系列从2025年的跟跑到2026年的全自主导航
- 推动商业化落地:赛事数据为商业化应用提供了重要参考,如荣耀计划2026年底前有希望看到面向普通消费者的小批量开售
4. 国际标准与规则制定权
赛事规则与技术要求与国际标准制定高度契合,体现了中国在具身智能领域的规则制定权。2026年2月,中国在国际标准化组织成功推动具身智能领域全球首项国际标准《人形机器人数据集》立项,实现了两个历史性的零的突破:人形机器人国际标准制定和机器人国际标准工作组建设。
赛事规则中强调的多传感器融合、自主决策、动态平衡等技术要求,与具身智能国际标准的核心内容高度一致,为标准落地提供了实践平台。清华大学自动化系研究员赵明国表示:"赛道设置对机器人的敏捷能力提出非常大的考验,即使人在这样的复杂情况下,实现大的机动转弯也很困难,而赛事规则正是为了检验机器人在这些方面的性能"。
五、赛事启示与未来展望
1. 技术发展的关键瓶颈与突破方向
当前人形机器人技术发展仍面临三大关键瓶颈:
能源管理与散热效率:赛事中表现优异的机器人普遍采用液冷散热技术,将散热效率提升至风冷的10-50倍。华科冷芯CEO陈奇指出:"人形机器人要实现持续高速奔跑,下肢关节电机需要高扭矩输出,同时产生大量热量。一旦散热没做好,关节性能就发挥不出来,跑到中后段会出现颤颤巍巍甚至跌倒的风险。"
自主导航与环境适应:自主导航组占比虽有提升,但仍不足40%,表明自主导航技术尚未完全成熟。清华大学自动化系研究员赵明国认为:"赛道环境要求机器人能够自主实现大的机动性,对它的敏捷能力提出比较大的考验。"
成本控制与量产能力:尽管宇树科技等企业已将成本降至10万元以内,但国际队伍仍面临设备成本高的挑战。荣耀计划2026年启动小批量量产,但实现大规模商业化仍需进一步降低成本。
未来技术突破方向包括:
- 混合散热方案:核心关节液冷+次要关节风冷的平衡方案
- AI动态温控算法:优化全局散热效率
- 具身大小脑协同架构:云端大模型负责复杂推理,端侧芯片处理实时控制
2. 产业格局与差异化竞争
当前人形机器人市场已形成三大差异化竞争格局:
特斯拉Optimus:走通用化、规模化路线,依托汽车供应链与Dojo超算,目标2026年量产5万台,主打工业产线、家庭服务,核心优势是成本控制与数据闭环。
宇树H1/H2系列:聚焦高速运动与工业场景,10m/s百米速度、30-40kg负载,率先在汽车、3C工厂落地搬运、巡检,以纯电驱、高性价比、快速量产抢占工业刚需市场。
智元远征A3:主打通用具身智能,以VLA大模型+全场景适配为核心,覆盖电力巡检、物流仓储、商用服务,构建"模型+整机+生态"全栈壁垒。
松延动力E1/N2:凭借大模型语义交互能力,在个人陪伴领域取得突破,年销量已突破数万台,覆盖老年陪伴市场。
银河通用GalbotG1:搭载灵巧手,完成盘核桃、叠衣服等精细操作,终端售价下探至3万元级,瞄准养老及家庭照护市场。
3. 应用场景拓展与商业化路径
人形机器人应用场景正从表演级向实用级快速拓展,主要体现在以下几个方向:
工业柔性制造:宇树G1/H2集群已实现20台机器人毫秒级协同,单机成本降至10万元以内,较海外竞品低80%,切入特种作业领域。
商业服务场景:小鹏IRON机器人在汽车门店导购应用中,获客转化率提升30%,依托VLM/VLA架构实现非标准化需求解析。
养老陪护市场:银河通用GalbotG1和松延动力E1/N2等产品已进入养老陪护市场,银河通用GalbotG1售价下探至3万元级,松延动力E1/N2年销量突破数万台。
消费级市场:荣耀"元气仔"等产品计划2026年底面向普通消费者开售,推动人形机器人从专业领域向消费级市场拓展。
4. 未来发展趋势与挑战
人形机器人产业正迎来从概念到产业的关键拐点,未来发展趋势包括:
技术迭代加速:2026年被视为人形机器人从"开发态"进入"部署态"的元年,技术迭代将持续突破,软硬件技术双线并进。
规模化落地关键期:2026年是人形机器人产业链规模化落地的关键窗口期,国产供应链通过技术自研与整合,正推动行业从"0到1"的突破。
应用场景拓展:从科研教育向工业、商业消费拓展,未来将切入家庭服务、物流仓储等万亿级场景。
挑战与瓶颈:
- 技术瓶颈:复杂环境下的自主导航、长时间高负载运行的稳定性、精细操作能力等
- 成本挑战:从实验室样机到大规模量产的成本控制
- 标准缺失:全球统一标准尚未形成,可能影响产业协同发展
六、小结
2026年北京亦庄人形机器人半程马拉松赛事不仅是一场技术竞赛,更是具身智能产业发展的重要里程碑。赛事通过创新的规则设计、严格的评价体系和多元化的参赛格局,推动了人形机器人技术从"能走"到"能跑赢人"的跨越式发展,实现了散热效率、动力系统和控制算法三大核心技术的突破。
赛事的成功举办标志着中国在具身智能领域的领先地位正在形成。从规则制定到标准引领,从技术验证到产业推动,北京亦庄赛事已成为具身智能领域的全球标杆。赛事中涌现出的液冷散热技术、高扭矩关节和高能量密度电池等创新成果,正在加速向产业应用转化,推动人形机器人从"实验室"走向"量产线"。
展望未来,人形机器人产业正迎来从概念到产业的关键拐点。随着技术迭代加速、产业链成熟度提升和应用场景不断拓展,人形机器人有望在2026-2027年实现商业化落地,从"能跑"到"能用",真正融入人类社会,成为推动生产力发展的新引擎。北京亦庄人形机器人半程马拉松赛事将继续发挥"以赛促研、以赛促产、以赛促用"的作用,为全球具身智能产业发展提供中国方案。

小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐


 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)