
【花雕学编程】Arduino BLDC 之GPS导航与电机控制
《Arduino手册(思路与案例)》栏目为电子制作与智能控制爱好者提供丰富资源,涵盖Arduino BLDC、ESP32、IoT等20+技术方向,包含4000+篇博客。通过具体案例与基础知识结合,帮助开发者掌握智能家居、农业等应用,激发创新灵感。访问链接获取更多学习内容。 (150字) 注:摘要提炼了核心内容,包括技术范围(20+方向)、资源规模(4000+博客)、应用场景(智能家居/农业等)和实

《Arduino 手册(思路与案例)》栏目介绍:
在电子制作与智能控制的应用领域,本栏目涵盖了丰富的内容,包括但不限于以下主题:Arduino BLDC、Arduino CNC、Arduino E-Ink、Arduino ESP32 SPP、Arduino FreeRTOS、Arduino FOC、Arduino GRBL、Arduino HTTP、Arduino HUB75、Arduino IoT Cloud、Arduino JSON、Arduino LCD、Arduino OLED、Arduino LVGL、Arduino PID、Arduino TFT,以及Arduino智能家居、智慧交通、月球基地、智慧校园和智慧农业等多个方面与领域。不仅探讨了这些技术的基础知识和应用领域,还提供了众多具体的参考案例,帮助读者更好地理解和运用Arduino平台进行创新项目。目前,本栏目已有近4000篇相关博客,旨在为广大电子爱好者和开发者提供全面的学习资源与实践指导。通过这些丰富的案例和思路,读者可以获取灵感,推动自己的创作与开发进程。
https://blog.csdn.net/weixin_41659040/category_12422453.html

Arduino BLDC之GPS导航与电机控制
一、主要特点
- 集成GPS模块:
• Arduino系统结合GPS模块(如NEO-6M、Ublox等),可以实时获取设备的地理位置信息,支持经度、纬度和高度的读取。 - 电机控制:
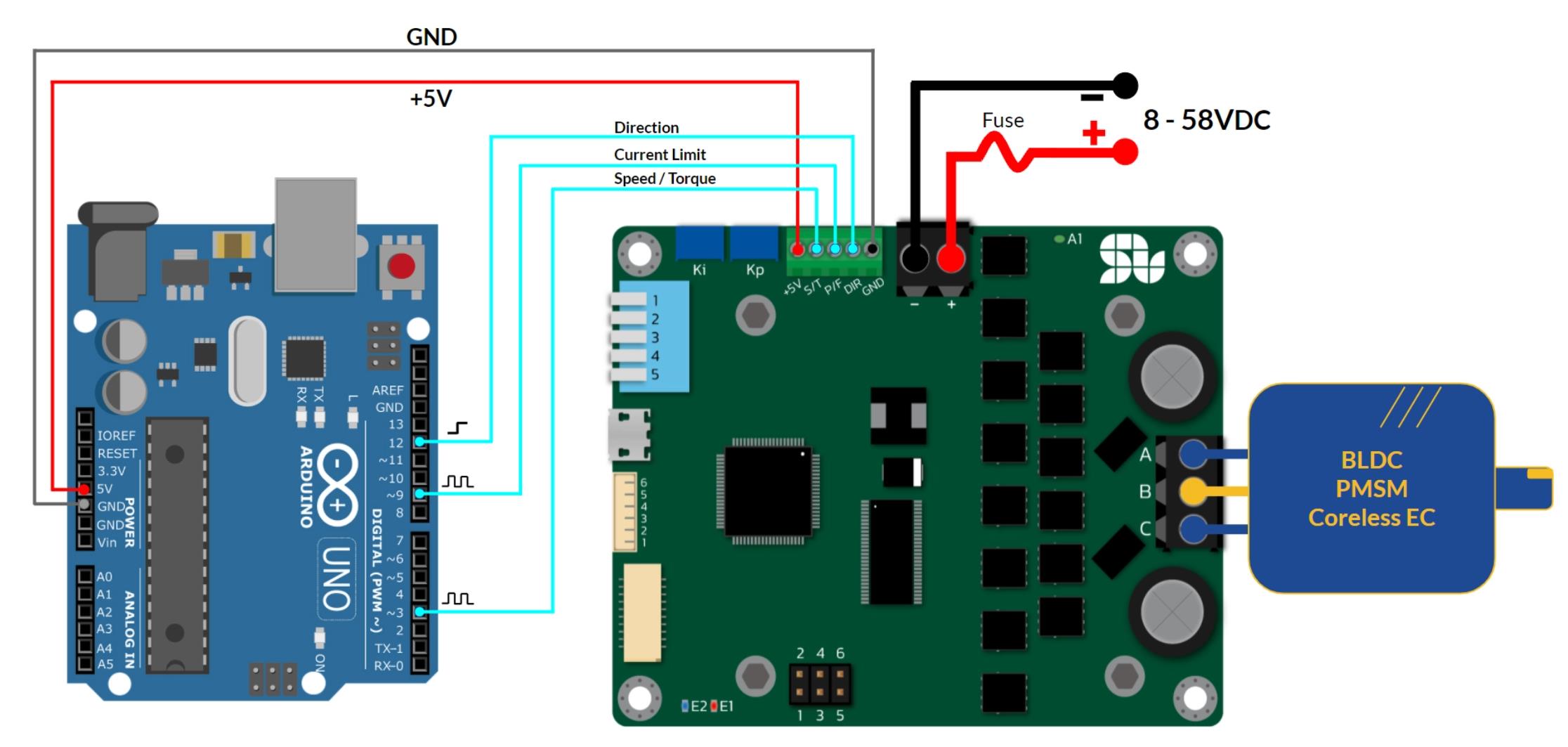
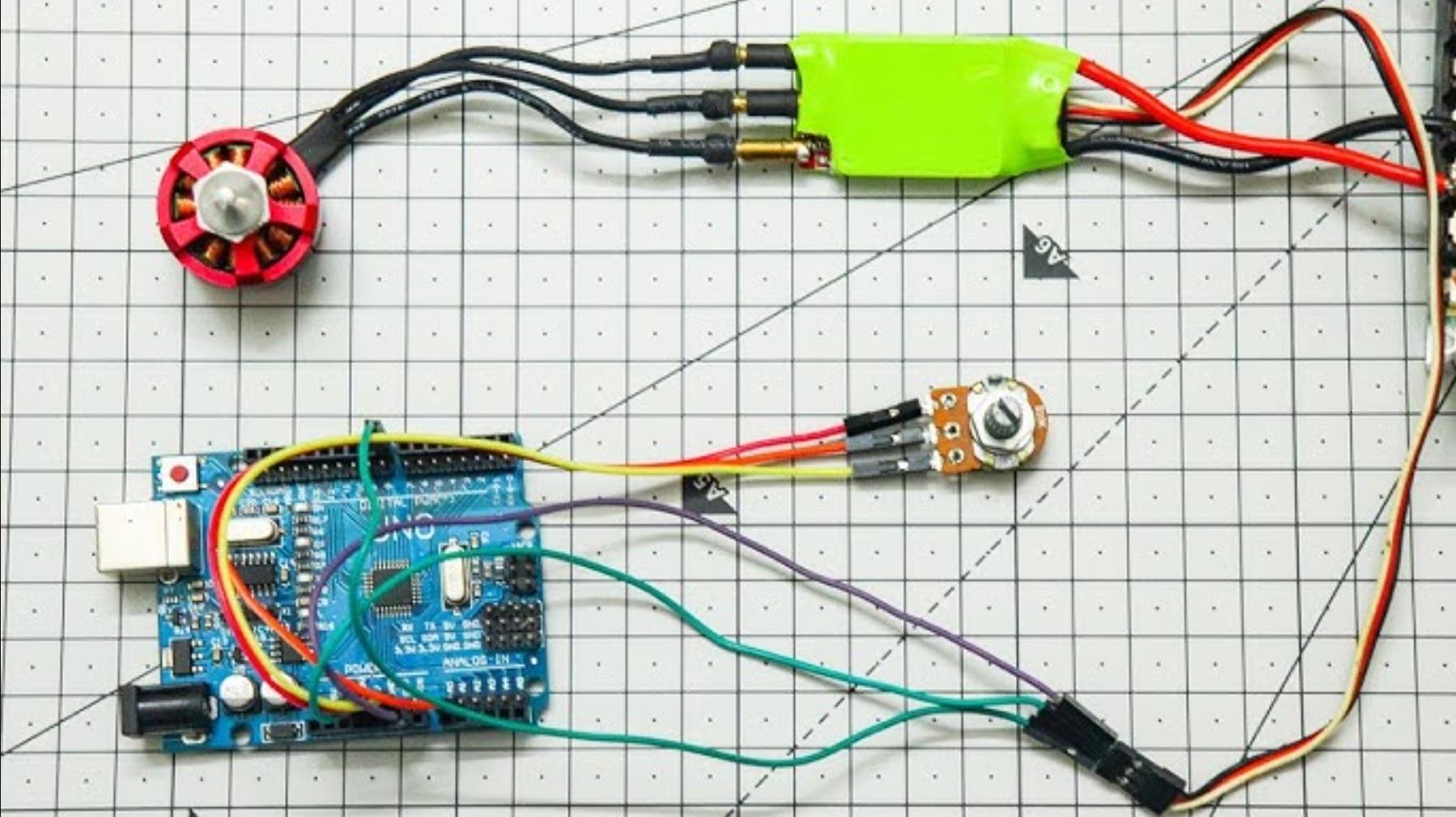
• 通过控制无刷直流电机(BLDC)的转速和方向,实现设备的移动。常用的电机驱动模块(如ESC)可以通过PWM信号进行控制。 - 路径规划:
• 系统可以根据GPS数据进行路径规划,设定目标位置,并通过算法(如A*算法、Dijkstra算法)计算最佳路线。 - 实时反馈:
• 实时监测设备位置,结合传感器数据(如陀螺仪、加速度计)进行状态反馈,提高导航的准确性和可靠性。 - 用户友好界面:
• 可通过LCD屏幕或手机APP显示实时位置、速度和导航信息,使用户更易于掌握设备状态。
二、应用场景
- 无人驾驶汽车:
• 在无人驾驶汽车中,GPS导航与电机控制的结合可以实现自动驾驶功能,确保车辆按照设定路线行驶。 - 自动化农业:
• 应用于农业机械(如播种机、喷药机)中,能够实现精准导航,提高农作物种植的效率和准确性。 - 无人机:
• 在无人机中,GPS导航与电机控制相结合,可以实现自主飞行、精准定位以及任务执行(如拍摄、测量等)。 - 机器人:
• 在移动机器人中,通过GPS进行室外导航,结合电机控制实现路径跟踪和障碍物避让。 - 物流和运输:
• 在物流配送中,结合GPS导航与电机控制,可以实现自动化货物运输,提高运输效率。
三、注意事项
- GPS信号质量:
• GPS信号受环境影响较大,如高楼、树木等遮挡可能导致信号弱或丢失,影响导航精度。需要在开阔地带进行操作。 - 准确性与延迟:
• GPS定位的准确性受卫星数量、信号干扰等因素影响,可能存在延迟。需要结合其他传感器(如IMU)进行数据融合,提升定位精度。 - 电机控制响应:
• 控制电机时,需考虑电机的响应时间和负载特性,避免过快的信号变化导致电机失控或损坏。 - 电源管理:
• 确保系统的电源稳定,GPS模块和电机驱动模块需要足够的电流支持,避免因供电不足导致系统故障。 - 路径规划算法:
• 选择合适的路径规划算法,并考虑障碍物、路况等因素,确保导航路径的可行性和安全性。 - 调试与测试:
• 在实际应用前,进行充分的调试和测试,以确保系统在各种环境下的稳定性和可靠性。
1、基本的GPS定位与电机控制
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
TinyGPSPlus gps;
SoftwareSerial serialGPS(4, 3); // RX, TX
#define IN1 8
#define IN2 9
void setup() {
Serial.begin(9600);
serialGPS.begin(9600);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
}
void loop() {
while (serialGPS.available()) {
gps.encode(serialGPS.read());
if (gps.location.isUpdated()) {
Serial.print("Latitude: ");
Serial.print(gps.location.lat(), 6);
Serial.print(" Longitude: ");
Serial.println(gps.location.lng(), 6);
// 简单控制电机
if (gps.location.lat() > 34.0) { // 根据纬度控制电机
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
} else {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
}
}
}
要点解读:
GPS模块:通过TinyGPSPlus库读取GPS数据,实时获取当前位置。
电机控制:根据纬度信息控制电机的启停,实现简单的导航功能。
简单逻辑:通过判断纬度来控制电机,适合基础学习和简单应用。
2、路径跟踪与电机控制
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
TinyGPSPlus gps;
SoftwareSerial serialGPS(4, 3); // RX, TX
#define IN1 8
#define IN2 9
float targetLat = 34.000000; // 目标纬度
float targetLng = -117.000000; // 目标经度
void setup() {
Serial.begin(9600);
serialGPS.begin(9600);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
}
void loop() {
while (serialGPS.available()) {
gps.encode(serialGPS.read());
if (gps.location.isUpdated()) {
float currentLat = gps.location.lat();
float currentLng = gps.location.lng();
Serial.print("Current Position: ");
Serial.print(currentLat, 6);
Serial.print(", ");
Serial.println(currentLng, 6);
// 路径跟踪逻辑
if (abs(currentLat - targetLat) < 0.0001 && abs(currentLng - targetLng) < 0.0001) {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW); // 到达目标,启动电机
} else {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW); // 未到达目标,停止电机
}
}
}
}
要点解读:
目标设定:通过设置目标纬度和经度,实现路径跟踪功能。
精确控制:利用经纬度差值判断是否到达目标位置,以控制电机的状态。
实用性:适合用于无人车、机器人等需要导航的应用场景。
3、动态导航与电机速度调整
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
TinyGPSPlus gps;
SoftwareSerial serialGPS(4, 3); // RX, TX
#define IN1 8
#define IN2 9
#define PWM_PIN 10 // 电机速度控制引脚
void setup() {
Serial.begin(9600);
serialGPS.begin(9600);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(PWM_PIN, OUTPUT);
}
void loop() {
while (serialGPS.available()) {
gps.encode(serialGPS.read());
if (gps.location.isUpdated()) {
float speed = gps.speed.kmph(); // 获取GPS速度
Serial.print("Speed: ");
Serial.println(speed);
// 根据速度调整电机速度
int pwmValue = map(speed, 0, 100, 0, 255); // 映射速度到PWM值
analogWrite(PWM_PIN, pwmValue); // 设置电机速度
// 简单启停逻辑
if (speed > 5) {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW); // 速度大于5km/h,启动电机
} else {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW); // 否则停止电机
}
}
}
}
要点解读:
动态调整:根据GPS获取的速度动态调整电机的PWM控制,引入了电机速度控制。
速度映射:使用map()函数将速度值映射到PWM范围,灵活控制电机转速。
适应性强:适合需要实时调整速度的应用,例如自主导航机器人。
4、无人机GPS导航与BLDC动力控制
#include <TinyGPS++.h>
#include <Servo.h> // ESC通常使用Servo库控制
// GPS配置
TinyGPSPlus gps;
#define GPS_RX 18 // Mega的Serial1
#define GPS_TX 19
// 电机控制
Servo esc[4]; // 四路ESC
int motorPins[4] = {2, 3, 4, 5};
float targetLat = 40.7128, targetLng = -74.0060; // 目标坐标(纽约示例)
void setup() {
Serial.begin(9600); // 调试输出
Serial1.begin(9600); // GPS模块通信
// ESC初始化(需先发送最小信号)
for (int i=0; i<4; i++) {
esc[i].attach(motorPins[i]);
esc[i].writeMicroseconds(1000); // ESC校准
}
delay(3000);
}
void loop() {
while (Serial1.available() > 0) {
if (gps.encode(Serial1.read())) {
if (gps.location.isValid()) {
// 计算到目标点的距离和航向
float distance = TinyGPSPlus::distanceBetween(
gps.location.lat(), gps.location.lng(),
targetLat, targetLng);
float courseTo = TinyGPSPlus::courseTo(
gps.location.lat(), gps.location.lng(),
targetLat, targetLng);
// 简单PID控制(需替换为完整PID算法)
float headingError = normalizeAngle(courseTo - gps.course.deg());
int throttle = 1300; // 基础油门
int roll = constrain(headingError * 5, -200, 200); // 横向修正
// 混合控制四路电机(简化模型)
esc[0].writeMicroseconds(throttle + roll); // 右前
esc[1].writeMicroseconds(throttle - roll); // 左前
esc[2].writeMicroseconds(throttle - roll); // 左后
esc[3].writeMicroseconds(throttle + roll); // 右后
}
}
}
}
// 角度归一化(-180°到180°)
float normalizeAngle(float angle) {
while (angle > 180) angle -= 360;
while (angle < -180) angle += 360;
return angle;
}
要点解析:
GPS数据处理:使用TinyGPS++库解析NMEA数据,注意检查location.isValid()
电机混合控制:四轴飞行器需将导航指令分解为油门、横滚、俯仰、偏航(本例简化处理)
ESC初始化:必须先发送1000μs信号校准油门范围
5、智能车GPS导航与转向控制
#include <SoftwareSerial.h>
#include <TinyGPS++.h>
// GPS配置
SoftwareSerial gpsSerial(4, 3); // RX, TX
TinyGPSPlus gps;
// 电机控制
#define MOTOR_LEFT_PWM 9
#define MOTOR_RIGHT_PWM 10
#define MOTOR_LEFT_DIR 7
#define MOTOR_RIGHT_DIR 8
// 导航参数
float targetLat = 34.0522, targetLng = -118.2437; // 洛杉矶坐标
float Kp_turn = 2.0; // 转向PID参数
void setup() {
Serial.begin(9600);
gpsSerial.begin(9600);
pinMode(MOTOR_LEFT_PWM, OUTPUT);
pinMode(MOTOR_RIGHT_PWM, OUTPUT);
pinMode(MOTOR_LEFT_DIR, OUTPUT);
pinMode(MOTOR_RIGHT_DIR, OUTPUT);
}
void loop() {
while (gpsSerial.available() > 0) {
if (gps.encode(gpsSerial.read())) {
if (gps.location.isValid() && gps.course.isValid()) {
// 计算目标航向
float courseTo = TinyGPSPlus::courseTo(
gps.location.lat(), gps.location.lng(),
targetLat, targetLng);
// 转向控制
float headingError = normalizeAngle(courseTo - gps.course.deg());
int turnPWM = constrain(abs(headingError) * Kp_turn, 0, 255);
// 电机驱动(差速转向)
if (headingError > 0) { // 向右转向
setMotor(MOTOR_LEFT_PWM, MOTOR_LEFT_DIR, 150, HIGH);
setMotor(MOTOR_RIGHT_PWM, MOTOR_RIGHT_DIR, turnPWM, LOW);
} else { // 向左转向
setMotor(MOTOR_LEFT_PWM, MOTOR_LEFT_DIR, turnPWM, HIGH);
setMotor(MOTOR_RIGHT_PWM, MOTOR_RIGHT_DIR, 150, LOW);
}
}
}
}
}
void setMotor(int pwmPin, int dirPin, int pwmVal, boolean dir) {
digitalWrite(dirPin, dir);
analogWrite(pwmPin, pwmVal);
}
float normalizeAngle(float angle) {
while (angle > 180) angle -= 360;
while (angle < -180) angle += 360;
return angle;
}
要点解析:
差速转向逻辑:通过左右轮差速实现转向,需注意转向时的最小PWM(避免电机堵转)
GPS信号检查:必须验证course.isValid()和location.isValid()
电机方向控制:使用DIR引脚控制正反转(需根据驱动模块调整)
案例3:履带机器人GPS路径跟踪
#include <TinyGPS++.h>
#include <FlexCAN.h> // CAN通信库
// GPS配置
TinyGPSPlus gps;
#define GPS_RX Serial1
// CAN总线控制
FlexCAN CANbus(500000);
static CAN_message_t msg;
// 路径点数组
float waypoints[][2] = {
{35.6895, 139.6917}, // 东京点1
{35.6850, 139.6950} // 东京点2
};
int currentWaypoint = 0;
void setup() {
Serial.begin(115200);
GPS_RX.begin(9600);
CANbus.begin();
// 初始化CAN消息(假设驱动器ID为0x10)
msg.id = 0x10;
msg.len = 8;
}
void loop() {
while (GPS_RX.available()) {
if (gps.encode(GPS_RX.read())) {
if (gps.location.isValid()) {
// 到达检查(半径5米)
float distance = TinyGPSPlus::distanceBetween(
gps.location.lat(), gps.location.lng(),
waypoints[currentWaypoint][0], waypoints[currentWaypoint][1]);
if (distance < 5.0 && currentWaypoint < sizeof(waypoints)/sizeof(waypoints[0])-1) {
currentWaypoint++;
}
// 计算航向误差
float courseTo = TinyGPSPlus::courseTo(
gps.location.lat(), gps.location.lng(),
waypoints[currentWaypoint][0], waypoints[currentWaypoint][1]);
float headingError = normalizeAngle(courseTo - gps.course.deg());
// CAN指令生成(简化协议)
int32_t speedCmd = 1000; // 基础速度
int16_t turnCmd = headingError * 20; // 转向比例
// 填充CAN数据(示例协议)
*((int32_t*)&msg.buf[0]) = speedCmd;
*((int16_t*)&msg.buf[4]) = turnCmd;
CANbus.write(msg);
}
}
}
}
float normalizeAngle(float angle) {
while (angle > 180) angle -= 360;
while (angle < -180) angle += 360;
return angle;
}
要点解析:
CAN总线通信:工业级应用常用CAN控制驱动器,需参考具体驱动器协议
路径点管理:使用数组存储多个航点,实现分段导航
误差处理:距离阈值(5米)和角度归一化避免控制振荡
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。


一起探索未来云端世界的核心,云原生技术专区带您领略创新、高效和可扩展的云计算解决方案,引领您在数字化时代的成功之路。
更多推荐

 32
32 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)