
【STM32基础 CubeMX】PWM输出
STM32微控制器是一系列功能强大的微控制器,广泛应用于嵌入式系统和电子设备中。其中一个常见的应用是生成PWM信号,用于控制各种设备,如电机、LED灯、声音发生器等。了解如何配置和使用PWM输出对于嵌入式系统开发非常重要。CubeMX是STMicroelectronics提供的一种工具,用于帮助开发人员轻松配置STM32微控制器并生成初始化代码。通过CubeMX,您可以在不深入复杂的寄存器级编程的
文章目录
前言
STM32微控制器是一系列功能强大的微控制器,广泛应用于嵌入式系统和电子设备中。其中一个常见的应用是生成PWM信号,用于控制各种设备,如电机、LED灯、声音发生器等。了解如何配置和使用PWM输出对于嵌入式系统开发非常重要。
CubeMX是STMicroelectronics提供的一种工具,用于帮助开发人员轻松配置STM32微控制器并生成初始化代码。通过CubeMX,您可以在不深入复杂的寄存器级编程的情况下,设置PWM输出的参数,节省了大量的时间和精力。
在本文中,我们将首先介绍STM32微控制器的基础知识,包括GPIO(通用输入/输出)引脚和定时器的概念,这是配置PWM输出所必需的。然后,我们将详细讨论CubeMX的基本用法,包括如何创建一个新的项目、配置定时器和GPIO引脚,以及生成PWM输出代码。
一、PWM是什么?
当我们需要控制某些东西的强度、亮度、速度等时,常常会用到PWM,即脉冲宽度调制。
想象一下你在做热巧克力,你有一杯热奶和一块巧克力,你想要控制巧克力的甜度。你可以用勺子每次蘸取一小勺巧克力,然后搅拌到奶里。如果你蘸巧克力的时间很短,巧克力味就不浓;如果你蘸巧克力的时间很长,巧克力味就浓。
PWM就有点像这个过程。它是一种通过不断切换电流的方式来控制设备的强度或亮度的方法。在PWM中,我们不是像勺子一样蘸取巧克力,而是快速地打开和关闭电流,然后根据打开和关闭的时间来控制设备的表现。如果打开时间很短,设备的效果就弱;如果打开时间很长,设备的效果就强。
所以,PWM就像在控制设备的过程中,以不同的速度开和关开关,从而控制了设备的特性,就像你用不同时间搅拌巧克力来控制它的味道一样。这是一种常见的电子控制技术,用于各种应用,从调光LED到控制电机速度都可以使用PWM。
二、CubeMX配置PWM
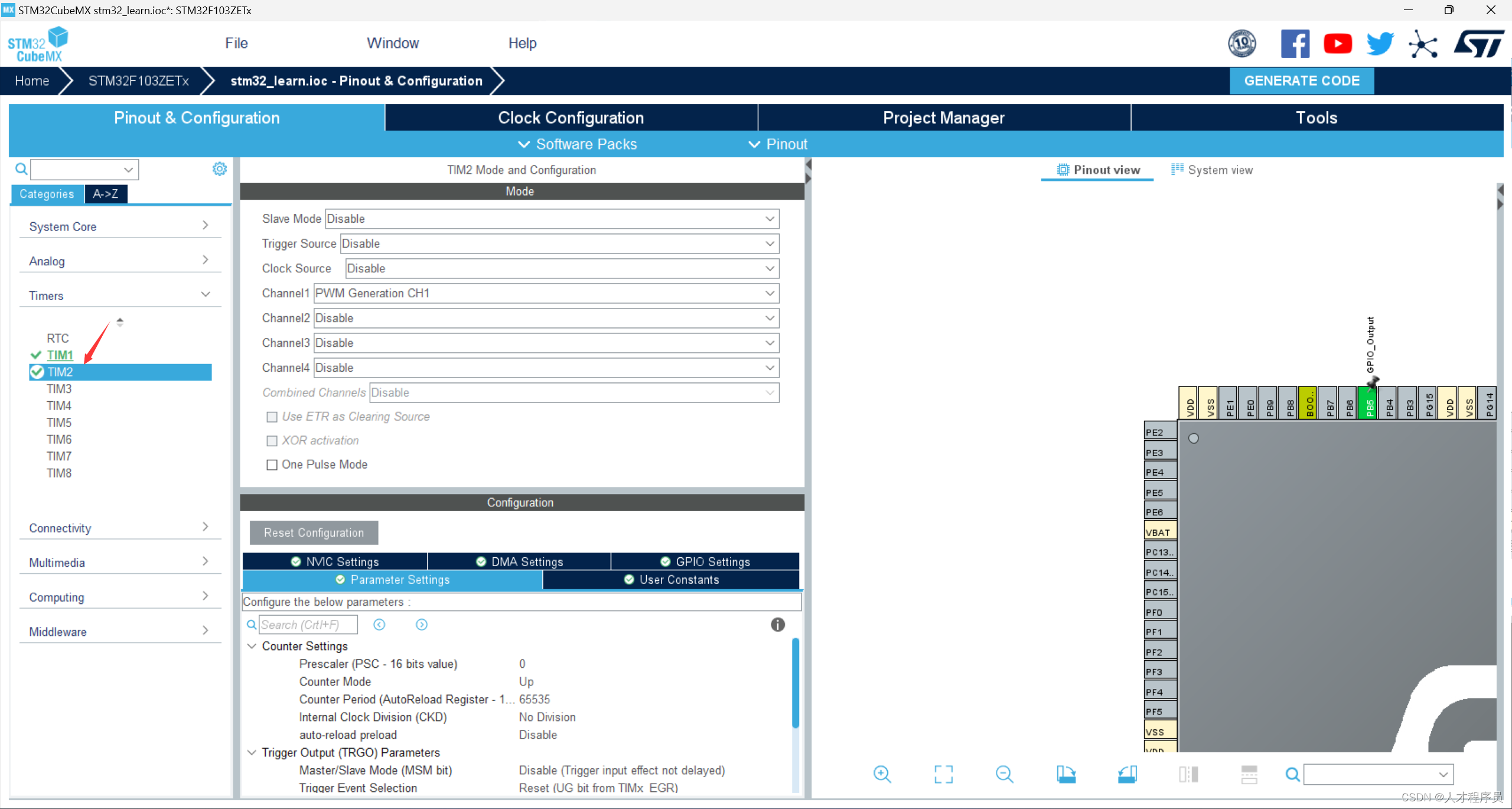
1、其实PWM占用的是定时器,所以我们要选择定时器。
2、然后选择通道
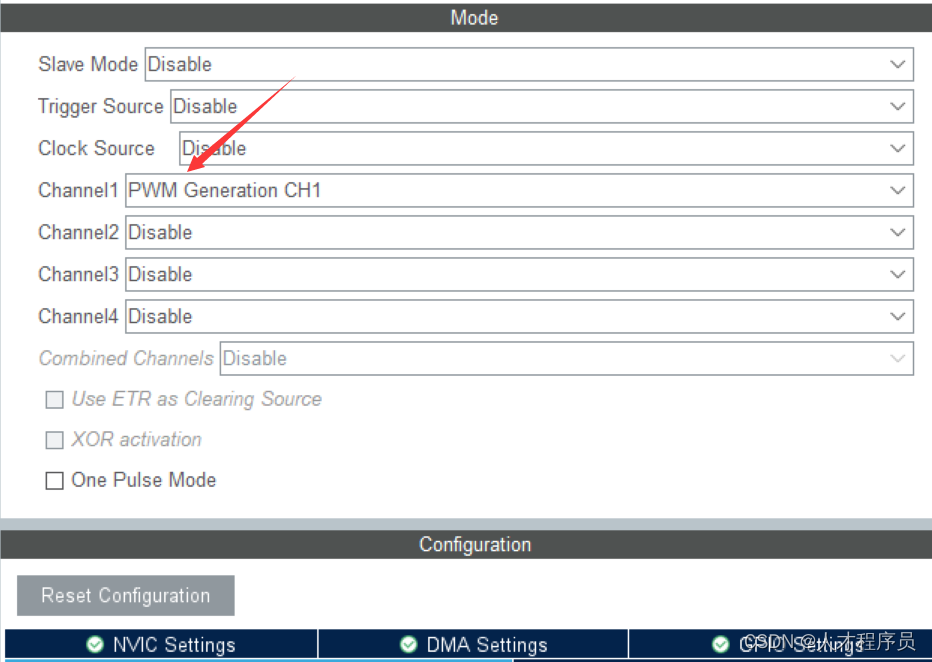
千万不要选错了。
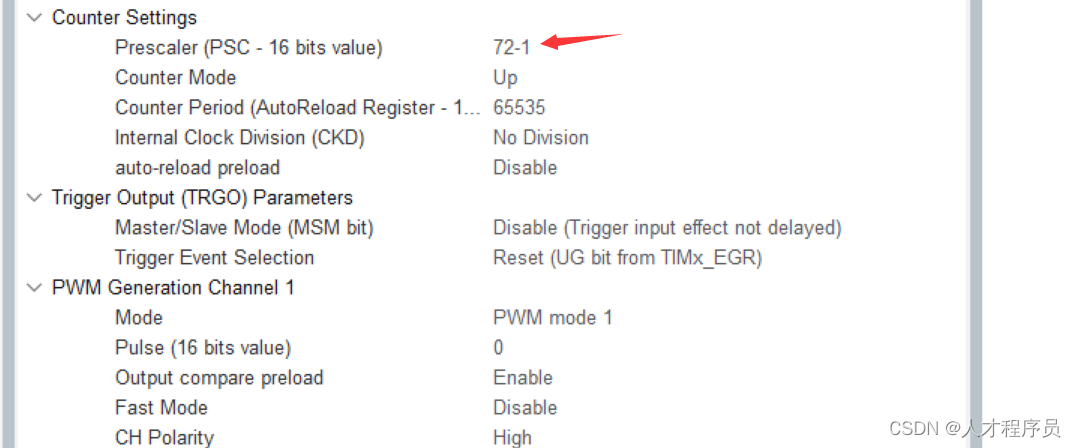
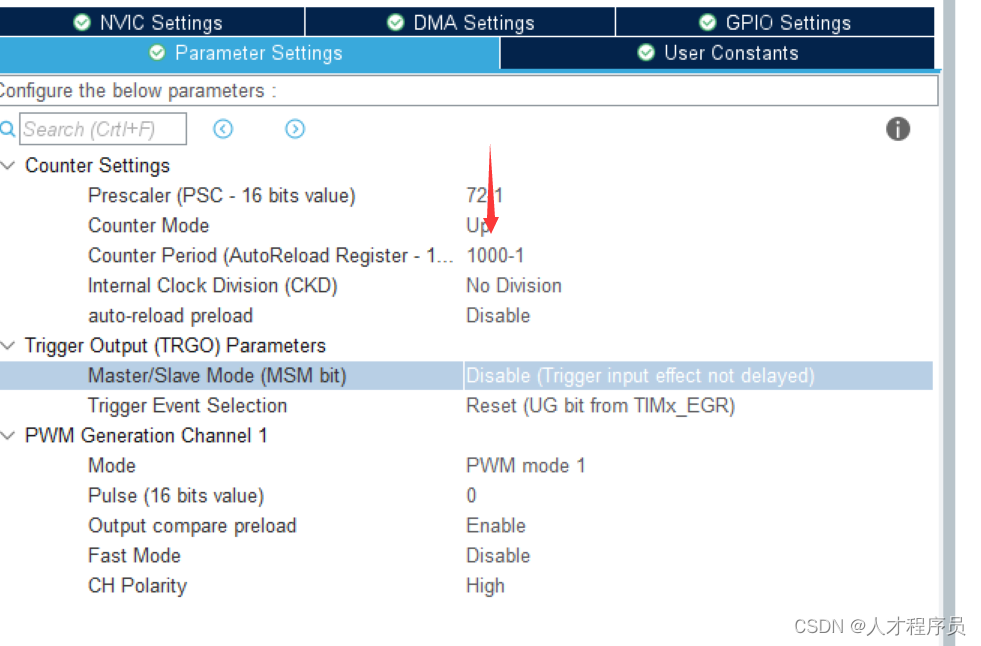
3、设置分频系数,和我们之前的定时器是一样的,如果忘记了的同学建议重看前面的文章!
4、设置周期
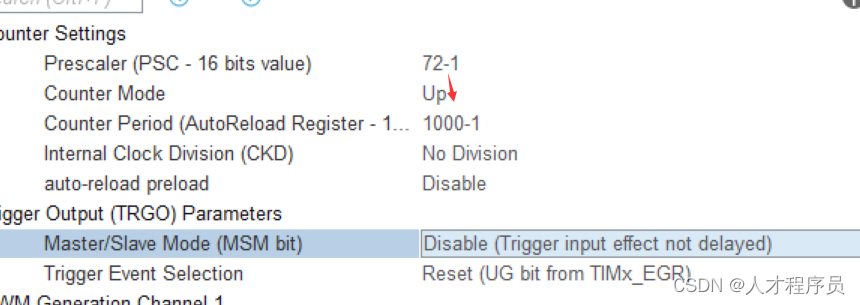
1000-1代表一个毫秒一次,可以说,这个就是我们常说的占空比,在后面我们会将占空比是什么。
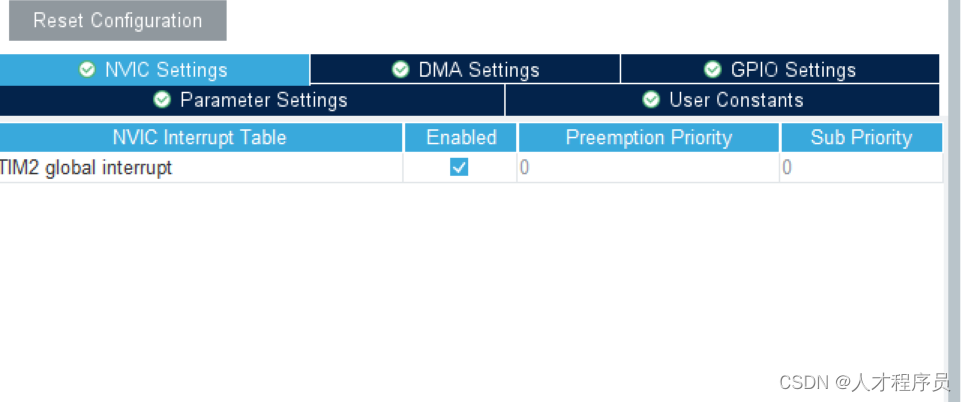
5、最后,设置一下中断开启即可
6、最后生成代码就可以了
三、代码分析
3.1 CubeMX生成代码
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 72-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1000-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
代码分析:
TIM_MasterConfigTypeDef sMasterConfig = {0}; 和 TIM_OC_InitTypeDef sConfigOC = {0}; 这两行定义了两个结构体变量 sMasterConfig 和 sConfigOC,用来存储定时器的配置信息。
htim2.Instance = TIM2; 这行代码将定时器 htim2 的实例设置为 TIM2,表明要配置的是 TIM2 定时器。
htim2.Init.Prescaler = 72-1; 这行代码设置了 TIM2 的分频器,分频器决定了计数器的计数速度。
htim2.Init.CounterMode = TIM_COUNTERMODE_UP; 这行代码设置了计数模式,即计数器是向上计数还是向下计数。
htim2.Init.Period = 1000-1; 这行代码设置了计数器的周期,即计数器从 0 开始计数,一直计数到 999,然后重新开始。
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; 这行代码设置了时钟分频器的分频系数,这里是不分频。
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; 这行代码禁用了自动重装载预装载,这意味着在更新定时器参数时不会立即生效,而是等待计数器计数到上一个周期结束后才会生效。
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK) 这行代码初始化了 PWM 功能的定时器 TIM2,如果初始化失败就会调用 Error_Handler() 函数进行错误处理。
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; 这行代码设置了主定时器的输出触发模式,这里是复位触发。
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; 这行代码禁用了主从模式,主从模式通常用于多个定时器的同步。
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK) 这行代码配置了主定时器的同步功能,如果配置失败就会调用 Error_Handler() 函数进行错误处理。
sConfigOC.OCMode = TIM_OCMODE_PWM1; 这行代码设置了 TIM2 的通道 1 为 PWM1 模式。
sConfigOC.Pulse = 0; 这行代码设置了 PWM 的脉冲值,初始值为 0。
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; 这行代码设置了 PWM 输出的极性,这里是高电平有效。
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; 这行代码禁用了快速输出模式。
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK) 这行代码配置了 TIM2 的通道 1 为 PWM 模式,如果配置失败就会调用 Error_Handler() 函数进行错误处理。
HAL_TIM_MspPostInit(&htim2); 这行代码完成了定时器的初始化后处理,可能包括一些硬件相关的配置。
3.2 PWM的几个库函数
HAL_TIM_PWM_Start
HAL_TIM_PWM_Start 函数是HAL库(Hardware Abstraction Layer,硬件抽象层)中用于启动定时器的 PWM(脉冲宽度调制)功能的函数。以下是该函数的原型、功能和参数含义:
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel);
HAL_StatusTypeDef:这是函数的返回类型,它表示函数执行的结果,通常用于检查函数是否成功执行。如果成功,返回 HAL_OK,否则返回错误代码。
TIM_HandleTypeDef *htim:这是一个指向 TIM_HandleTypeDef 结构体的指针,用于指定要操作的定时器。
uint32_t Channel:这是一个表示通道的参数,用于指定要启动 PWM 的定时器通道。通常,定时器可以有多个通道,每个通道可以独立配置并启动 PWM 输出。
函数的功能是启动指定通道的 PWM 输出。PWM 是一种用于产生脉冲宽度可调的信号的技术,通常用于控制电机速度、LED亮度等应用。通过调整参数,你可以控制 PWM 的频率和占空比。启动 PWM 后,定时器将按照配置的参数生成 PWM 信号,并根据需要输出到相应的引脚上。
使用示例:
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
上述示例代码将启动 htim2 定时器的通道 1 上的 PWM 输出。这将使定时器开始生成 PWM 信号,并根据配置的参数输出到相应的引脚上。
3.3 PWM回调函数
函数原型如下:
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim);
3.4 占空比
占空比是什么
在前面我们已经设置了这个属性
占空比是一个用来描述脉冲信号中高电平时间与周期之比的概念。通俗来说,它表示了一个周期内信号处于高电平状态的时间比例。
考虑一个周期性的信号,比如一个方波或PWM(脉冲宽度调制)信号。这个信号在一个周期内会不断重复,而占空比告诉我们高电平(通常是1,表示电压为高的状态)在这个周期内占据了多大的比例。
举个例子,如果我们有一个方波信号,它在一个周期内持续高电平的时间是2毫秒,而周期总共是10毫秒,那么占空比就是2毫秒/10毫秒,也就是20%。这意味着在这个信号中,高电平状态占据了整个周期的20%。占空比通常以百分比的形式表示,因此这个信号的占空比是20%。
占空比在电子电路和信号处理中非常重要,因为它决定了信号的特性。在PWM中,占空比控制了输出信号的平均电压或功率,因此可以用来控制电机的速度、LED的亮度等。在电路设计中,占空比也常常用来调整信号的特性,以满足特定的需求。
或者我们可以简单的理解为:占我们上面的图片上的1000的百分之几,我们的灯的亮度就会是正常的百分之几。
__HAL_TIM_SET_COMPARE设置占空比
__HAL_TIM_SET_COMPARE 宏是用于在STMicroelectronics的HAL库中设置定时器的通道比较值(比较寄存器值)的宏。这个宏通常用于PWM(脉冲宽度调制)控制,其中比较值决定了PWM信号的占空比。以下是宏的作用和参数:
作用:
__HAL_TIM_SET_COMPARE 宏的作用是将指定定时器的指定通道的比较值(比较寄存器的值)设置为给定的值。这允许您动态地更改PWM信号的占空比,以控制相关设备的亮度、速度或其他特性。
参数:
TIMx:这是指向TIM(定时器)外设的指针,其中 x 表示具体的定时器,例如 TIM1、TIM2 等。您需要指定要设置比较值的定时器。
Channel:这是指定要设置比较值的通道,通常以宏的形式表示,如 TIM_CHANNEL_1、TIM_CHANNEL_2 等。不同的通道对应于定时器的不同输出引脚或用途。
Compare:这是要设置的比较值。比较值决定了PWM信号的占空比。具体数值的意义取决于应用,通常是一个表示时间或百分比的值。
使用示例:
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, 500);
上述示例将 htim2 定时器的通道 1 的比较值设置为 500。这将影响定时器生成的PWM信号的占空比,具体效果取决于定时器和应用的配置。
四、呼吸灯示例
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
static uint32_t index = 0;
static uint8_t step = 0;
switch(step)
{
case 0:
{
__HAL_TIM_SET_COMPARE(htim,TIM_CHANNEL_1,index);
index++;
if(index >= 1000)
{
step = 1;
}
}
break;
case 2:
{
__HAL_TIM_SET_COMPARE(htim,TIM_CHANNEL_1,index);
index--;
if(index == 0)
{
step = 0;
}
}
break;
}
}
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim):这是一个函数定义,表示一个回调函数,它会在PWM信号的一个脉冲周期结束后被调用。它接受一个指向定时器句柄(TIM_HandleTypeDef)的指针作为参数。
static uint32_t index = 0;:这是一个静态变量,用来记录一个数值,初始值为0。它在函数内部保留其值,而不会在每次函数调用时重新初始化。
static uint8_t step = 0;:同样是一个静态变量,用来记录一个表示步骤的数值,初始值为0。
switch(step):这是一个开关语句,根据 step 的值来执行不同的代码块。
case 0::如果 step 的值为0,那么执行以下代码块。
__HAL_TIM_SET_COMPARE(htim, TIM_CHANNEL_1, index);:这是一个函数调用,用于设置定时器的通道1的PWM信号的占空比,占空比的值由 index 决定。
index++;:增加 index 的值,这将在下次函数调用时用于增加PWM信号的占空比。
if(index >= 1000):如果 index 的值大于或等于1000,执行以下代码块。
step = 1;:将 step 的值设置为1,这将触发下一个 case 中的代码块执行。
case 2::如果 step 的值为2,执行以下代码块。
index–;:减小 index 的值,这将在下次函数调用时用于减小PWM信号的占空比。
if(index == 0):如果 index 的值等于0,执行以下代码块。
step = 0;:将 step 的值重新设置为0,这将触发下一个 case 0 中的代码块执行,形成一个循环。
这段代码的作用是在PWM信号中逐渐增加占空比,然后再逐渐减小占空比,不断循环。这通常用于控制某些设备或效果的强度或速度。每次函数调用都会更新PWM信号的占空比,直到达到一定条件(例如占空比达到1000或0)时,会改变步骤(step)来反转占空比的变化方向。这种方式可以创建一种周期性变化的PWM信号,用于控制设备的行为。
总结
STM32微控制器是一系列功能强大的微控制器,广泛应用于嵌入式系统和电子设备中。其中一个常见的应用是生成PWM信号,用于控制各种设备,如电机、LED灯、声音发生器等。了解如何配置和使用PWM输出对于嵌入式系统开发非常重要。
CubeMX是STMicroelectronics提供的一种工具,用于帮助开发人员轻松配置STM32微控制器并生成初始化代码。通过CubeMX,您可以在不深入复杂的寄存器级编程的情况下,设置PWM输出的参数,节省了大量的时间和精力。
在本文中,我们将首先介绍STM32微控制器的基础知识,包括GPIO(通用输入/输出)引脚和定时器的概念,这是配置PWM输出所必需的。然后,我们将详细讨论CubeMX的基本用法,包括如何创建一个新的项目、配置定时器和GPIO引脚,以及生成PWM输出代码。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 13
13 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)