ROS2 humble安装-chatgpt版本
但是,如果您使用的是其他 UTF-8 支持的区域设置,则应该没问题。由于 Ubuntu 22.04 中的早期更新,在安装 ROS 2 之前更新与 --相关的软件包非常重要。ROS 1 桥可以将 ROS 1 到 ROS 2 的主题连接起来,反之亦然。ROS 2 使用的默认中间件是 ,但中间件 (RMW) 可以在运行时替换。应该看到这样的说法,即它是消息,并且说这些消息。继续学习教程和演示,以配置环境
如果按照chatgpt版本可能不合适。请一定要参考官网。
ROS (Robot Operating System) 是一个开源的机器人操作系统,提供了一系列软件库和工具,用于构建机器人应用程序。以下是在 Ubuntu 系统中安装 ROS Humble 的详细步骤和方法:
首先,确保你的 Ubuntu 系统版本是 16.04 (Xenial) 或更高版本,并且已经安装了必要的依赖项。可以使用以下命令来更新系统并安装所需的依赖项:
复制
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install curl gnupg2 lsb-release
添加 ROS 软件库,以便可以从中获取 ROS 软件包。在终端中输入以下命令:
复制
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
添加 ROS 公钥,以便在下载软件包时进行验证。输入以下命令以添加 ROS 密钥:
复制
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
更新软件包列表,以便在 ROS 软件库中查找可用的软件包:
复制
sudo apt-get update
安装 ROS 桌面完整版(包括常用的工具、库和ROS 可视化工具):
复制
sudo apt-get install ros-humble-desktop-full
初始化 ROS 环境,使其可以在终端中使用。在终端中输入以下命令:
复制
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装 rosdep,用于安装 ROS 包的依赖项。在终端中输入以下命令:
复制
sudo apt-get install python-rosdep
初始化 rosdep,使其可以正常工作:
复制
sudo rosdep init
rosdep update
最后,检查 ROS 是否安装成功,输入以下命令:
复制
roscore
如果没有出现错误提示,说明 ROS 安装成功。
以上是在 Ubuntu 系统中安装 ROS Humble 的详细步骤和方法,希望能够帮助到您
提问时候需要区分ROS和ROS2,另一个答案:
ROS2 Humble是ROS2的发行版之一,以下是安装ROS2 Humble的详细步骤和方法:
添加ROS2 Humble仓库
复制
sudo apt update
sudo apt install curl gnupg2 lsb-release
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2-humble/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-humble.list'
安装ROS2 Humble
复制
sudo apt update
sudo apt install ros-humble-desktop
初始化ROS2环境
复制
source /opt/ros/humble/setup.bash
验证ROS2安装
运行以下命令验证ROS2是否安装成功:
复制
ros2 doctor
如果ROS2安装成功,则会显示一条成功消息。
安装ROS2 Humble的额外工具和包
除了基本的ROS2 Humble桌面包之外,还可以安装其他工具和包,以便更好地使用ROS2。例如,可以使用以下命令安装ROS2 Humble的可视化工具:
复制
sudo apt install ros-humble-rqt
sudo apt install ros-humble-rviz2
以上就是安装ROS2 Humble的详细步骤和方法
测试系统版本Ubuntu 22.04.1 LTS:

安装完成后:
配置远程登陆:
4 sudo apt install xrdp
5 sudo systemctl restart xrdp
6 sudo ufw allow form any to any port 3389
7 sudo ufw allow from any to any port 3389
8 sudo ufw allow 3389
9 sudo systemctl restart xrdp
10 sudo ufw allow from any to any port 3389
11 sudo ufw allow 3389
安装全部指令:
17 locale # check for UTF-8
18 sudo apt update && sudo apt install locales
19 sudo locale-gen en_US en_US.UTF-8
20 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
21 export LANG=en_US.UTF-8
22 locale # verify settings
23 sudo apt install software-properties-common
24 sudo add-apt-repository universe
25 sudo apt update && sudo apt install curl
26 sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
27 echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
28 sudo apt update
29 sudo apt upgrade
30 sudo apt install ros-humble-desktop
31 sudo apt install ros-dev-tools
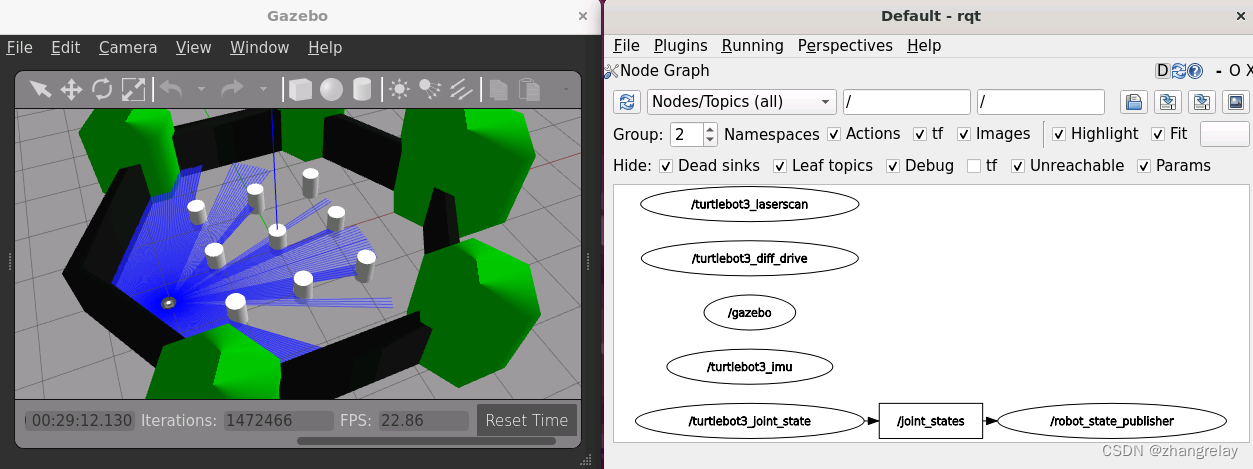
32 sudo apt install ros-humble-turtlebot3-gazebo ros-humble-turtlebot3-simulations
33 source /opt/ros/humble/setup.bash
34 ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
35 export TURTLEBOT3_MODEL=burger
36 ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py 还是官网香啊!
http://docs.ros.org/en/humble/Installation.html设置区域设置
确保具有支持 . 如果处于最小环境(例如 docker 容器)中,则区域设置可能是最小值,例如 。 使用以下设置进行测试。但是,如果您使用的是其他 UTF-8 支持的区域设置,则应该没问题。UTF-8POSIX
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
设置源
需要将 ROS 2 apt 存储库添加到系统中。
首先确保启用了 Ubuntu Universe 存储库。
sudo apt install software-properties-common
sudo add-apt-repository universe
现在添加带有 apt 的 ROS 2 GPG 密钥。
sudo apt update && sudo apt install curl
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
然后将存储库添加到源列表中。
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
安装 ROS 2 软件包
设置存储库后更新 apt 存储库缓存。
sudo apt update
ROS 2 软件包建立在经常更新的 Ubuntu 系统上。 始终建议在安装新软件包之前确保系统是最新的。
sudo apt upgrade
警告
由于 Ubuntu 22.04 中的早期更新,在安装 ROS 2 之前更新与 --相关的软件包非常重要。 在新安装的系统上安装 ROS 2 的依赖项而不进行升级可能会触发关键系统软件包的删除。systemdudev
有关更多信息,请参阅 ros2/ros2#1272 和启动板 #1974196。
桌面安装(推荐):ROS,RViz,演示,教程。
sudo apt install ros-humble-desktop
ROS 基本安装(裸版本):通信库、消息包、命令行工具。 没有图形用户界面工具。
sudo apt install ros-humble-ros-base
开发工具:用于构建 ROS 包的编译器和其他工具
sudo apt install ros-dev-tools
环境设置
获取安装脚本
通过获取以下文件来设置环境。
# Replace ".bash" with your shell if you're not using bash# Possible values are: setup.bash, setup.sh, setup.zshsource /opt/ros/humble/setup.bash
尝试一些示例
发布-订阅
如果您安装在上面,您可以尝试一些示例。ros-humble-desktop
在一个终端中,获取安装文件,然后运行C++:talker
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_cpp talker
在另一个终端中获取安装文件,然后运行 Python :listener
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_py listener
应该看到这样的说法,即它是消息,并且说这些消息。 这将验证C++和 Python API 是否正常工作。 万岁!
安装后的后续步骤
继续学习教程和演示,以配置环境、创建自己的工作区和包,并了解 ROS 2 核心概念。
使用 ROS 1 网桥
ROS 1 桥可以将 ROS 1 到 ROS 2 的主题连接起来,反之亦然。请参阅有关如何构建和使用 ROS 1 网桥的专用文档。
其他 RMW 实现(可选)
ROS 2 使用的默认中间件是 ,但中间件 (RMW) 可以在运行时替换。 请参阅有关如何使用多个 RMW 的指南。Fast DDS
故障排除
可在官方维基找到故障排除技术。
卸载
如果需要卸载 ROS 2 或切换到基于源代码的安装,一旦 已从二进制文件安装,运行以下命令:
sudo apt remove ~nros-humble-* && sudo apt autoremove
可能还希望删除存储库:
sudo rm /etc/apt/sources.list.d/ros2.list
sudo apt update
sudo apt autoremove
# Consider upgrading for packages previously shadowed.
sudo apt upgrade
长江两岸老火锅,共聚山城开发者!We Want You!
更多推荐

 2
2 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)