




- @ZhangRelay
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
服务机器人算法工程师学历要求:本科及以上学历,机器人、数学、计算机、通信或电子工程类相关专业经验:3年以上坐标:苏州或者上海职位描述:1、负责全覆盖路径机器人规划算法开发,包括:遍历路径规划,自主反充,分区处理,自主避障,自主脱困等2. 负责机器人运动规划和控制算法开发3、算法的移植和产品化,实现智能全覆盖路径规划任职资格:1、本科及以上学历,机器人、数学、计算机、通信或电子工程类相关专业,3年以
科技革命带来效率提升的同时也加速了传统岗位的淘汰。文章以龙虾智能助手(OpenClaw)为例,展现了2026年智能工具对机器人开发领域的颠覆性影响。这款工具能高效完成ROS2环境配置、代码生成等基础开发工作,使得初级工程师岗位大幅缩减。作者通过早餐摊的生动比喻,揭示了"效率提升→需求不变→用人减少"的技术迭代规律。尽管智能工具极大提升了开发效率,但也带来了行业就业格局的重塑,促
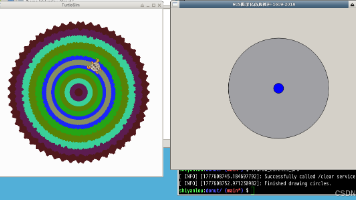
本文介绍了一个基于C/C++和ROS的移动机器人开发教程系列,重点围绕TEB局部规划器展开。内容涵盖12年研发积累,分为C语言基础、C++面向对象、STL容器算法、ROS节点开发四大模块,通过真实可运行的代码示例讲解机器人工程开发的核心技术。教程特色包括:1) 提供一键运行的终端命令;2) 每个示例标注核心知识点和工程适配说明;3) 从传感器数据处理到TEB规划器开发的完整链路;4) 适配Ubun
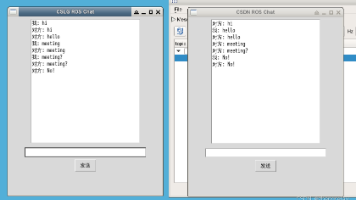
本文介绍了一个基于ROS Kinetic和Python 2.7的极简图形化聊天程序。该程序使用Tkinter库构建GUI界面,通过ROS话题机制实现消息传输。系统包含两个核心文件:chat_gui.py提供用户交互界面,chat_forward.py作为消息转发桥。程序特点包括:纯极简设计、支持回车发送/点击发送、自动滚动显示消息、占用资源小。安装仅需python-tk库,适合在Ubuntu 16
本文摘要主要介绍了面向对象和面向过程编程的区别,以及Linux系统在计算机编程和IT行业中的重要性。面向过程编程以步骤为中心,数据和操作分离,适合简单任务;面向对象编程以实体为中心,封装数据和操作,适合复杂项目。Linux作为互联网底层基石,广泛应用于服务器、云服务、嵌入式等领域,是IT从业者必备技能。文章还提供了多线程编程实验、CMake构建工具使用以及动态爱心代码等实用技术内容,帮助读者掌握编

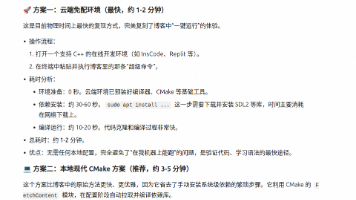
本文摘要:文章介绍了博主ZhangRelay的C/C++编程系列教程,该系列通过"几秒到三分钟"的递进式教学,帮助开发者掌握Linux环境下的自动化脚本、CMake项目构建及机器人开发。教程从基础Shell脚本(如一键编译运行)入手,逐步深入CMake工程化(Modern CMake最佳实践)和ROS机器人开发,形成"脚本→Makefile→CMake→ROS&quo
对于有ROS使用经验的开发者而言,非常简单,并且能和ROS 1 Melodic、ROS 2 Bouncy共存(更新source bash,选择使用版本即可)。支持系统windows、linux和mac os,愉快玩耍!安装具体过程如下:tianbot@ros2go:~$ sudo apt update tianbot@ros2go:~$ sudo apt install ros-...
本文介绍了《移动机器人设计与实践》课程期末考试试卷B卷的内容与参考答案。试卷包含分析题、设计题、实践题和编程题四部分,总分100分。分析题考察学生对空中、水面和地上三种移动机器人模型运动机制及应用场景的理解;设计题要求设计工业仓储物流机器人并分析路径规划方法;实践题涉及机器人环境搭建与轨迹绘制;编程题则测试传感器数据获取、运动控制和路径跟踪算法的实现能力。参考答案提供了详细解答思路和评分标准,帮助
因为:Canonical将Ubuntu 18.04 LTS Linux支持扩展到10年这是第一次LTS的支持长达10年!!!非常有助于解决版本过多,迭代过快等现象。并且,Ubuntu 18.04 可以非常方便安装 ROS 1和2,教程和案例都已经非常丰富了。但是,如果保守一点Ubuntu 16.04 + ROS Kinetic是次佳的选择。----Canoni...
前一篇,讲解了如何在屏幕或者两台电脑之间传输一段信息:https://zhangrelay.blog.csdn.net/article/details/116241480C++的输入和输出(iostream):cincout这都是使用“流”(stream)的方式实现。>><<对比,C语言中标准库函数(cstdio):scanfprintf使用scanf比cin效率高,速度快